






#include <opencv2/highgui/highgui.hpp>
#include <opencv2/nonfree/nonfree.hpp>
#include <opencv2/legacy/legacy.hpp>
#include <iostream>
using namespace std;
// 计算图像的SIFT特征及匹配
float cacSIFTFeatureAndCompare(cv::Mat srcImage1,
cv::Mat srcImage2, float paraHessian)
{
CV_Assert(srcImage1.data != NULL && srcImage2.data != NULL);
// 转换为灰度
cv::Mat grayMat1, grayMat2;
cv::cvtColor(srcImage1, grayMat1, CV_RGB2GRAY);
cv::cvtColor(srcImage2, grayMat2, CV_RGB2GRAY);
// 初始化SURF检测描述子
cv::SurfFeatureDetector surfDetector(paraHessian);
cv::SurfDescriptorExtractor surfExtractor;
// 关键点及特征描述矩阵声明
vector<cv::KeyPoint> keyPoints1, keyPoints2;
cv::Mat descriptorMat1, descriptorMat2;
// 计算surf特征关键点
surfDetector.detect( grayMat1, keyPoints1 );
surfDetector.detect( grayMat2, keyPoints2 );
// 计算surf特征描述矩阵
surfExtractor.compute(grayMat1, keyPoints1, descriptorMat1);
surfExtractor.compute(grayMat2, keyPoints2, descriptorMat2);
float result = 0;
// 特征点匹配
if (keyPoints1.size() > 0 && keyPoints2.size() > 0)
{
// 计算特征匹配点
cv::FlannBasedMatcher matcher;
vector< cv::DMatch > matches;
std::vector<cv::DMatch> viewMatches;
matcher.match( descriptorMat1, descriptorMat2, matches);
// 最优匹配判断
double minDist = 100;
for (int i = 0; i < matches.size(); i++)
{
if(matches[i].distance < minDist)
minDist = matches[i].distance;
}
// 计算距离特征符合要求的特征点
int num = 0;
std::cout << "minDist: "<< minDist << std::endl;
for( int i = 0; i < matches.size(); i++ )
{
// 特征点匹配距离判断
if(matches[i].distance <= 2 * minDist)
{
result += matches[i].distance * matches[i].distance;
viewMatches.push_back(matches[i]);
num++;
}
}
// 匹配度计算
result /= num;
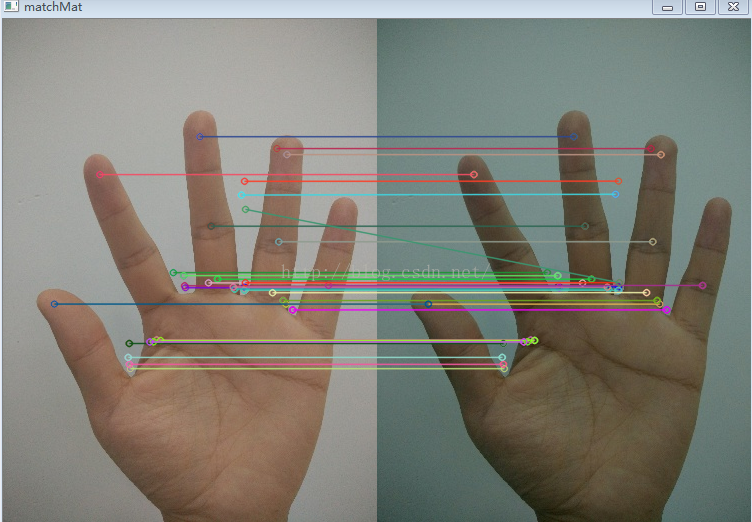
// 绘制特征点匹配结果
cv::Mat matchMat;
cv::drawMatches(srcImage1, keyPoints1,
srcImage2, keyPoints2, matches, matchMat);
cv::imshow("matchMat", matchMat);
cv::waitKey(0);
}
return result;
}
int main ()
{
// 读取源图像及待匹配图像
cv::Mat srcImage1 =
cv::imread("hand1.jpg", 1);
if (srcImage1.empty())
return -1;
cv::Mat srcImage2 =
cv::imread("hand3.jpg", 1);
if (srcImage2.empty())
return -1;
float matchRate= cacSIFTFeatureAndCompare(srcImage1, srcImage2,1000);
std::cout <<"matchRate: " << matchRate << std::endl;
return 0;
}
http://lib.csdn.net/base/opencv














 1946
1946











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









