







原创文章,欢迎转载。转载请注明:转载自 祥的博客
原文链接:http://blog.csdn.net/humanking7/article/details/44756073
摄像机的标定得先从坐标系谈起。
=> 1.预备知识
=> 1.1.平面旋转
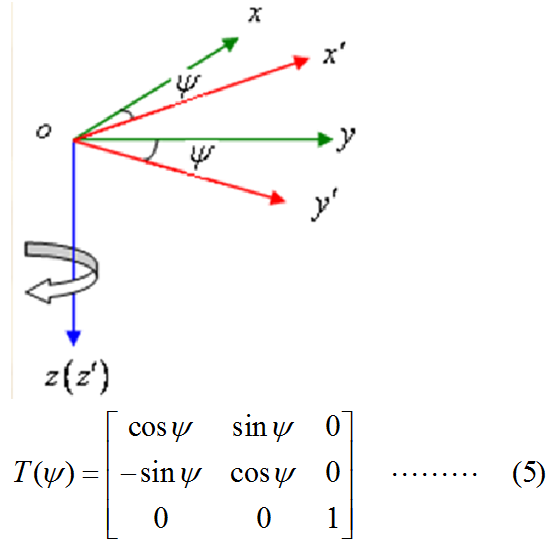
首先看一下平面坐标系之间的转换。
两个平面坐标系 Oxy 和 Ox'y' 之间的夹角是 a 。如下图所示:
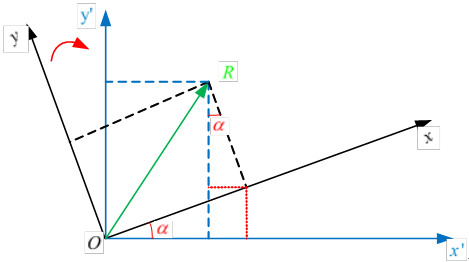
顺时针旋转 (Oxy -> Ox'y') ,变换关系如下:
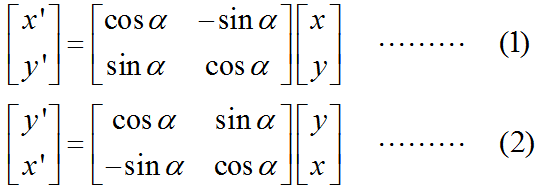
公式(1) 和 公式(2) 等价。注意坐标顺序,下面论证会用到。
=> 1.2.三维旋转
=> 1.2.1.基元旋转
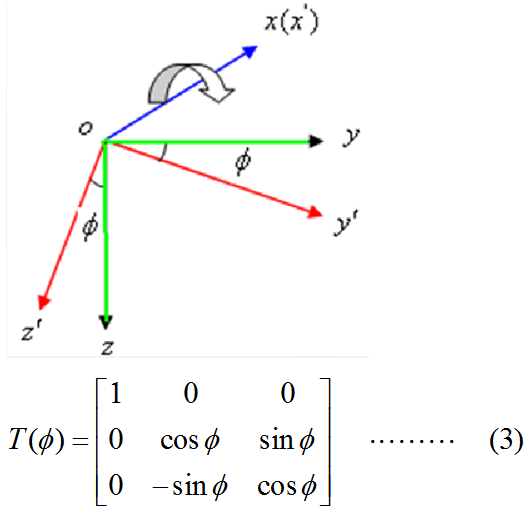
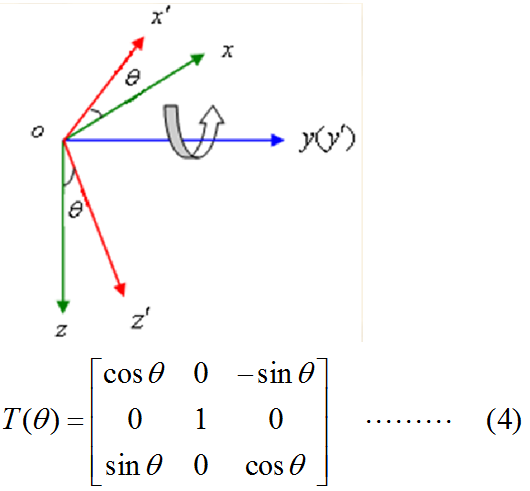
基元旋转,坐标系绕它的一个轴旋转:
1. 绕 Ox 轴顺时针旋转(右手定则),但是坐标排列次序相反使用上述 公式(2) 。
2. 绕 Oy 轴顺时针旋转(右手定则),坐标排列次序使用上述 公式(1) 。
3. 绕 Oz 轴顺时针旋转(右手定则),但是坐标排列次序相反使用上述 公式(2) 。
=> 1.2.2.点在不同三维坐标系下的转换(坐标系之间没有平移)
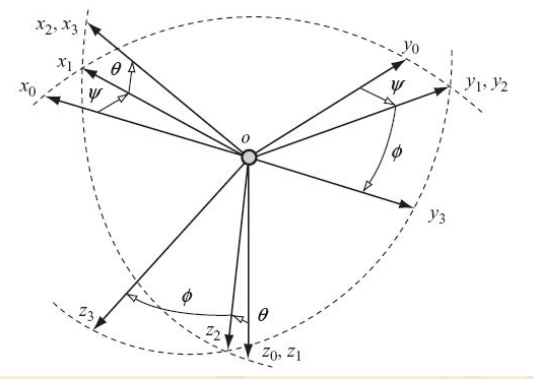
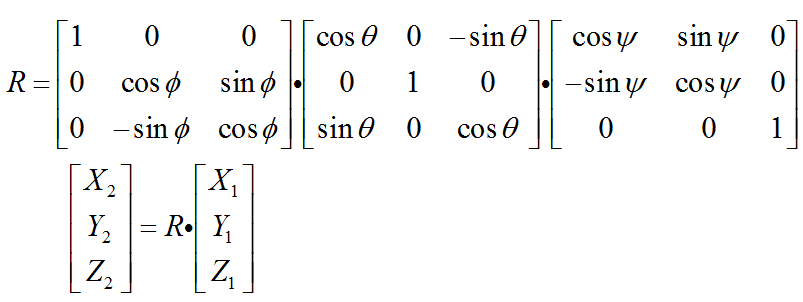
有了基元旋转的基础,如果一个点在两个坐标系之中,而且两个坐标系共用一个原点,这样空间点在两个坐标系之间转换存在一个旋转矩阵R 。
假如两个坐标轴之间的变换关系为,坐标系1 先绕 Oz 轴旋转, 再绕 Oy 轴旋转, 最后绕 Ox 轴旋转,最终得到了坐标系2,则 旋转矩阵R 为这三个 基元旋转矩阵 依次 左乘 。
=> 1.2.3.点在不同三维坐标系下的转换(坐标系可能存在平移)
如果两个坐标系之间不共 原点 ,就是说明这两个坐标系之间除了 旋转向量,还存在 平移向量 。
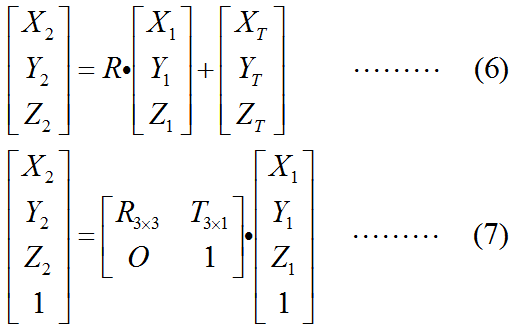
相对于 公式(6) , 公式(7) 运用了齐次坐标,这样公式看起来更加规整,计算起来更加方便,网友说可以参考可参见“周兴和版的《高等几何》—1.3拓广平面上的齐次坐标” ,有机会了可以拜读一下。
=> 2.四个坐标系
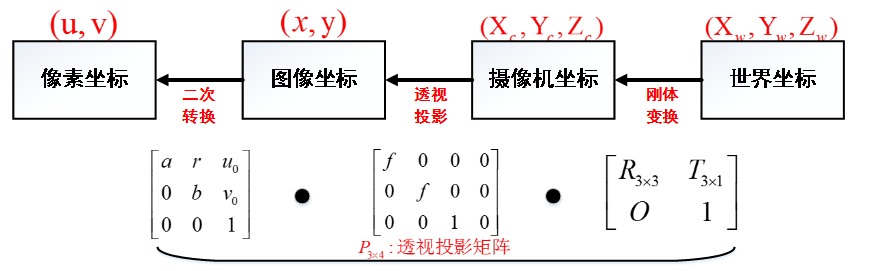
在视觉测量中,需要进行的一个重要预备工作是定义四个坐标系的意义,即 摄像机坐标系 、 图像物理坐标系 、 像素坐标系 和 世界坐标系(参考坐标系) 。
=> 2.1.图像物理坐标系(x,y) 到 像素坐标系(u,v)
1. 最简单的情况 (两坐标轴都为直角坐标系)
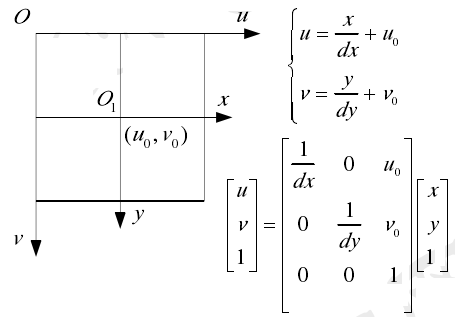
图像上的每点坐标 (u,v) 分别表示每一帧采集的图像在系统中的存储的数组的列数与行数,坐标 (u,v) 所对应的值就是该点的灰度信息,因此坐标系 uOv 又称为 像素坐标系。
同时,为了建立图像中各点的像素与实际的物理尺寸的联系,我们还要建立 图像物理坐标系 xO1y 。设点 O1 在图像像素坐标系中记为 (u0,v0) ,每个像素沿 x 轴的实际物理尺寸大小是 dx,沿 y 轴的实际物理尺寸大小是dy ,单位值毫米,则能得到两个坐标系间的关系式 。
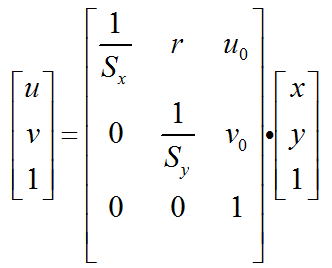
2. 一般情况 (两坐标轴有一个轴平行,一个轴不平行)
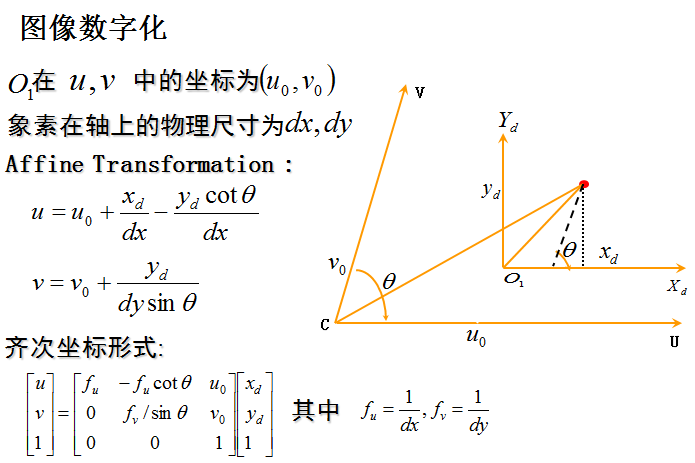
为了方便以后公式的推导,将公式写为:
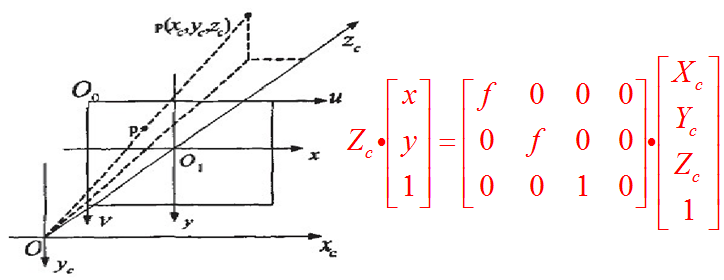
=> 2.2.图像物理坐标系(x,y) 到 摄像机坐标系(Xc,Yc,Zc)
初中的 三角形相似 问题可以解决。
=> 2.3.摄像机坐标系(Xc,Yc,Zc) 到 世界坐标系(Xw,Yw,Yw)
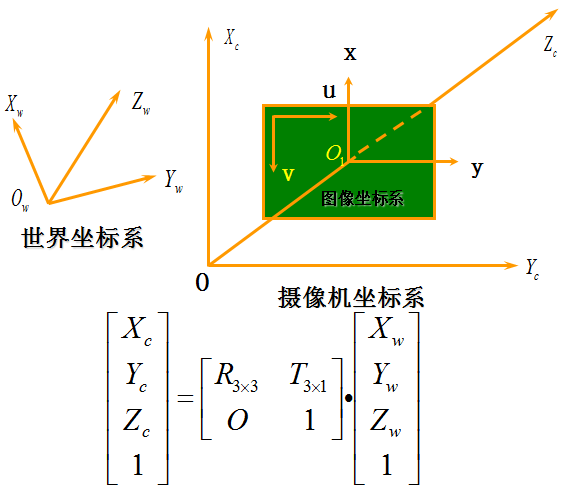
=> 2.4.合并公式 + 总结
将公式合并后,如下所示:
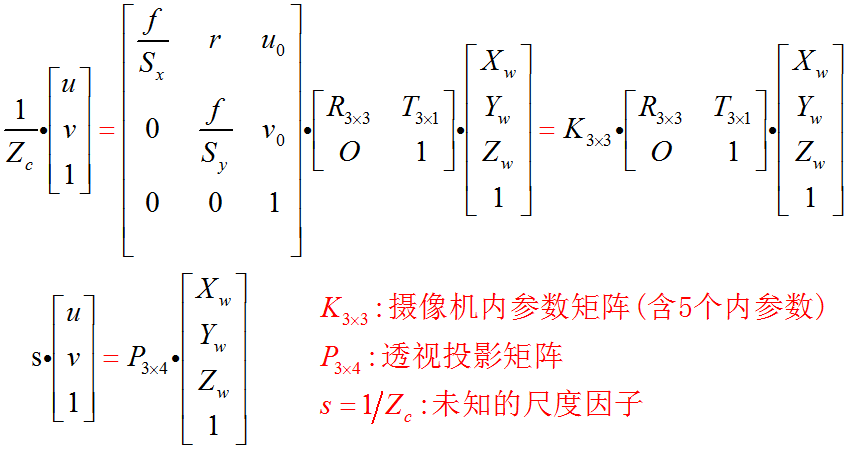
综上所述,大家可以看出四个坐标系之间存在着下述关系 ( 矩阵依次左乘 )
















 4877
4877

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









