







1、神经网络(Neural Networks)
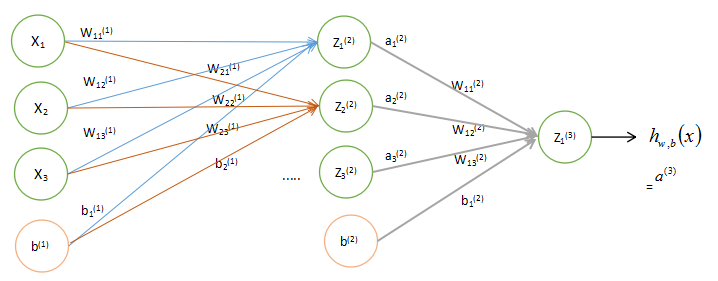
用
nl
表示网络层数,本例中
nl=3
,将第
l
层记为




我们用


我们用
z(l)i
表示第
l
层第
i
单元输入加权和(包括偏置单元),比如,

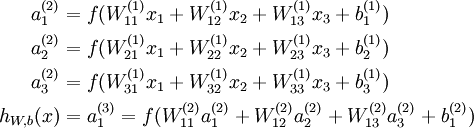
我们将上面的计算步骤叫作前向传播。回想一下,之前我们用
a(1)=x
表示输入层的激活值,那么给定第
l
层的激活值
a(l)
后,第
l+1
层的激活值
a(l+1)
就可以按照下面步骤计算得到:
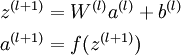
将参数矩阵化,使用矩阵-向量运算方式,我们就可以利用线性代数的优势对神经网络进行快速求解。
其中函数
f:R↦R
被称为“激活函数”。通常是sigmoid函数:

它的导数是


它的导数是
2、反向传导算法(Backpropagation Algorithm)
假设我们有一个固定样本集
{(x(1),y(1))
,
…
,
(x(m),y(m))}
,它包含
m
个样例。我们可以用批量梯度下降法来求解神经网络。具体来讲,对于单个样例
(x,y)
,其代价函数为:
J(W,b;x,y)=12∣∣hW,b(x)−y∣∣2.
这是一个(二分之一的)方差代价函数。给定一个包含
m
个样例的数据集,我们可以定义整体代价函数为:
J(W,b)=[1m∑i=1mJ(W,b;x(i),y(i))]+λ2∑l=1nl−1∑i=1sl∑j=1sl+1(W(l)ji)2=[1m∑i=1m(12∥∥hW,b(x(i))−y(i)∥∥2)]+λ2∑l=1nl−1∑i=1sl∑j=1sl+1(W(l)ji)2
以上公式中的第一项
J(W,b)
是一个均方差项。第二项是一个规则化项(也叫权重衰减项),其目的是减小权重的幅度,防止过度拟合。
我们的目标是针对参数
W
和
b
来求其函数
J(W,b)
的最小值。为了求解神经网络,我们需要将每一个参数
W(l)ij
和
b(l)i
初始化为一个很小的、接近零的随机值(比如说,使用正态分布
Normal(0,ϵ2)
生成的随机值,其中
ϵ
设置为
0.01
),而不是全部置为
0。如果所有参数都用相同的值作为初始值,那么所有隐藏层单元最终会得到与输入值有关的、相同的函数(也就是说,对于所有
i,W(1)ij
都会取相同的值,那么对于任何输入
x
都会有:
a(2)1=a(2)2=a(2)3=…
)。
梯度下降法中每一次迭代都按照如下公式对参数
W
和
b
进行更新:
W(l)ijb(l)i=W(l)ij−α∂∂W(l)ijJ(W,b)=b(l)i−α∂∂b(l)iJ(W,b)
其中
α
是学习速率。
∂∂W(l)ijJ(W,b;x,y)
和
∂∂b(l)iJ(W,b;x,y)
这两项是单个样例
(x,y)
的代价函数
J(W,b;x,y)
的偏导数。一旦我们求出该偏导数,就可以推导出整体代价函数
J(W,b)
的偏导数:
∂∂W(l)ijJ(W,b)∂∂b(l)iJ(W,b)=⎡⎣1m∑i=1m∂∂W(l)ijJ(W,b;x(i),y(i))⎤⎦+λW(l)ij=1m∑i=1m∂∂b(l)iJ(W,b;x(i),y(i))
反向传播算法的思路如下:给定一个样例
(x,y)
,我们首先进行“前向传导”运算,计算出网络中所有的激活值,包括
hW,b(x)
的输出值。之后,针对第
l
层的每一个节点
i
,我们计算出其“残差”
δ(l)i
,该残差表明了该节点对最终输出值的残差产生了多少影响。对于最终的输出节点,我们可以直接算出网络产生的激活值与实际值之间的差距,我们将这个差距定义为
δ(nl)i
(第
nl
层表示输出层)。
反向传播算法可表示为以下几个步骤:
1、进行前馈传导计算,利用前向传导公式,得到
L2,L3,…
直到输出层
Lnl
的激活值。
2、对输出层(第
nl
层),计算:
δ(nl)=−(y−a(nl))∙f′(z(nl))(1)
3、对于
l=nl−1,nl−2,nl−3,…,2
的各层,计算:
δ(l)=((W(l))Tδ(l+1))∙f′(z(l))(2)
4、计算最终需要的偏导数值:
假设
f(z)
是sigmoid函数,就可以计算得到
f′(z(l)i)=a(l)i(1−a(l)i)。
下面,我们实现批量梯度下降法中的一次迭代:
1、对于所有
l
,令
ΔW(l):=0
,
Δb(l)
:= 0 (设置为全零矩阵或全零向量)
2、对于
i=1
到
m
,
使用反向传播算法计算
∇W(l)J(W,b;x,y)
和
∇b(l)J(W,b;x,y)
。
计算
ΔW(l):=ΔW(l)+∇W(l)J(W,b;x,y)
。
计算
Δb(l):=Δb(l)+∇b(l)J(W,b;x,y)
。
3、更新权重参数:
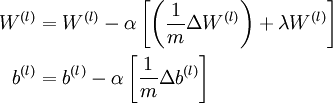
现在,我们可以重复梯度下降法的迭代步骤来减小代价函数
J(W,b)
的值,进而求解我们的神经网络。
反向传导算法代码解读
代码来源:Matlab Toolbox for Dimensionality Reduction
function network = backprop(network, X, T, max_iter, noise, lambda)
%BACKPROP Trains a network on a dataset using backpropagation
%
% The function trains the specified network using backpropagation on
% dataset X with targets T for max_iter iterations. The dataset X is an NxD
% matrix, whereas the targets matrix T has size NxM. The function returns
% the trained network in network.
%targets T作为正确的输出值,用来构建损失函数
%lambda是权重衰减项的系数,一般设置为1e-4
%
if ~exist('max_iter', 'var') || isempty(max_iter)
max_iter = 10;
end
if ~exist('noise', 'var') || isempty(noise)
noise = 0;
end
if ~exist('lambda', 'var') || isempty(lambda)
lambda = 0;
end
% Initialize some variables
n = size(X, 1);%X数据集的样本个数
no_layers = length(network);%网络层数
batch_size = max(round(n / 100), 100);%选round(n / 100)和100中的大数作为一批样本的容量
% Perform the backpropagation
for iter=1:max_iter
disp([' - iteration ' num2str(iter) ' of ' num2str(max_iter) '...']);
% Loop over all batches
index = randperm(n);
for batch=1:batch_size:n%使用每批样本更新一次W和bias_upW(批量梯度下降法)
% Select current batch
tmpX = X(index(batch:min([batch + batch_size - 1 n])),:);%取一批X样本,最后一批不足batch_size的的样本归为一批
tmpT = T(index(batch:min([batch + batch_size - 1 n])),:);
% Randomly black out some of the input data
if noise > 0
tmpX(rand(size(tmpX)) < noise) = 0;
end
% Convert the weights and store them in the network
v = [];
for i=1:length(network)
v = [v; network{i}.W(:); network{i}.bias_upW(:)];%把所有层的参数W和bias_upW汇总为一个列向量。
end
% Conjugate gradient minimization using 3 linesearches
[v, fX] = minimize(v, 'backprop_gradient', 3, network, tmpX, tmpT, lambda);
%[C, dC] = backprop_gradient(v, network, X,targets,lambda)
%使用network和X计算出输出值,与正确输出值targets相减,构建损失函数。lambda是对W进行L2规则化的系数。C是损失函数的值,dC是损失函数的导数值。
% minimize函数是共轭梯度下降法(3次线性搜索),解决连续可导多变量函数的最优化问题。初始值是参数v(必须是列向量),得到的v使损失函数值最小,即最优值,fX是三次搜索中每次得到的损失函数值(如果搜索不成功,则fX为空)。
% Deconvert the weights and store them in the network
ind = 1;%把列向量v拆分成所有层的参数W和bias_upW。
for i=1:no_layers
network{i}.W = reshape(v(ind:ind - 1 + numel(network{i}.W)), size(network{i}.W)); ind = ind + numel(network{i}.W);
network{i}.bias_upW = reshape(v(ind:ind - 1 + numel(network{i}.bias_upW)), size(network{i}.bias_upW)); ind = ind + numel(network{i}.bias_upW);
end
% Stop upon convergence
if isempty(fX)
reconX = run_data_through_autoenc(network, X);
C = sum((T(:) - reconX(:)) .^ 2) ./ n;
disp([' - final noisy MSE: ' num2str(C)]);
return
end
end%按批使用样本结束
% Estimate the current error
reconX = run_data_through_autoenc(network, X);
C = sum((T(:) - reconX(:)) .^ 2) ./ n;%估计误差
disp([' - current noisy MSE: ' num2str(C)]); %每次循环,显示一次误差
end%达到最大循环次数max_iter
function [X, fX, i] = minimize(X, f, length, P1, P2, P3, P4, P5, P6);
% Minimize a continuous differentialble multivariate function. Starting point
% is given by "X" (D by 1), and the function named in the string "f", must
% return a function value and a vector of partial derivatives. The Polack-
% Ribiere flavour of conjugate gradients is used to compute search directions,
% and a line search using quadratic and cubic polynomial approximations and the
% Wolfe-Powell stopping criteria is used together with the slope ratio method
% for guessing initial step sizes. Additionally a bunch of checks are made to
% make sure that exploration is taking place and that extrapolation will not
% be unboundedly large. The "length" gives the length of the run: if it is
% positive, it gives the maximum number of line searches, if negative its
% absolute gives the maximum allowed number of function evaluations. You can
% (optionally) give "length" a second component, which will indicate the
% reduction in function value to be expected in the first line-search (defaults
% to 1.0). The function returns when either its length is up, or if no further
% progress can be made (ie, we are at a minimum, or so close that due to
% numerical problems, we cannot get any closer). If the function terminates
% within a few iterations, it could be an indication that the function value
% and derivatives are not consistent (ie, there may be a bug in the
% implementation of your "f" function). The function returns the found
% solution "X", a vector of function values "fX" indicating the progress made
% and "i" the number of iterations (line searches or function evaluations,
% depending on the sign of "length") used.
%
% Usage: [X, fX, i] = minimize(X, f, length, P1, P2, P3, P4, P5, P6)
%
% See also: checkgrad
%
% Copyright (C) 2001 and 2002 by Carl Edward Rasmussen. Date 2002-02-13
%
%
% This file is part of the Matlab Toolbox for Dimensionality Reduction.
% The toolbox can be obtained from http://homepage.tudelft.nl/19j49
% You are free to use, change, or redistribute this code in any way you
% want for non-commercial purposes. However, it is appreciated if you
% maintain the name of the original author.
%
% (C) Laurens van der Maaten, Delft University of Technology
RHO = 0.01; % a bunch of constants for line searches
SIG = 0.5; % RHO and SIG are the constants in the Wolfe-Powell conditions
INT = 0.1; % don't reevaluate within 0.1 of the limit of the current bracket
EXT = 3.0; % extrapolate maximum 3 times the current bracket
MAX = 20; % max 20 function evaluations per line search
RATIO = 100; % maximum allowed slope ratio
argstr = [f, '(X']; % compose string used to call function
for i = 1:(nargin - 3)
argstr = [argstr, ',P', int2str(i)];
end
argstr = [argstr, ')']; %构建了语句:backprop_gradient(X,P1,P2,P3,P4)
if max(size(length)) == 2, red=length(2); length=length(1); else red=1; end
if length>0, S=['Linesearch']; else S=['Function evaluation']; end
i = 0; % zero the run length counter
ls_failed = 0; % no previous line search has failed
fX = [];
[f1 df1] = eval(argstr); %执行之前构建的语句。即,backprop_gradient(X,network, tmpX, tmpT, lambda)
% get function value and gradient
i = i + (length<0); % count epochs?!
s = -df1; % search direction is steepest
d1 = -s'*s; % this is the slope
z1 = red/(1-d1); % initial step is red/(|s|+1)
while i < abs(length) % while not finished
i = i + (length>0); % count iterations?!
X0 = X; f0 = f1; df0 = df1; % make a copy of current values
X = X + z1*s; % begin line search
[f2 df2] = eval(argstr);
i = i + (length<0); % count epochs?!
d2 = df2'*s;
f3 = f1; d3 = d1; z3 = -z1; % initialize point 3 equal to point 1
if length>0, M = MAX; else M = min(MAX, -length-i); end
success = 0; limit = -1; % initialize quanteties
while 1
while ((f2 > f1+z1*RHO*d1) | (d2 > -SIG*d1)) & (M > 0)
limit = z1; % tighten the bracket
if f2 > f1
z2 = z3 - (0.5*d3*z3*z3)/(d3*z3+f2-f3); % quadratic fit
else
A = 6*(f2-f3)/z3+3*(d2+d3); % cubic fit
B = 3*(f3-f2)-z3*(d3+2*d2);
z2 = (sqrt(B*B-A*d2*z3*z3)-B)/A; % numerical error possible - ok!
end
if isnan(z2) | isinf(z2)
z2 = z3/2; % if we had a numerical problem then bisect
end
z2 = max(min(z2, INT*z3),(1-INT)*z3); % don't accept too close to limits
z1 = z1 + z2; % update the step
X = X + z2*s;
[f2 df2] = eval(argstr);
M = M - 1; i = i + (length<0); % count epochs?!
d2 = df2'*s;
z3 = z3-z2; % z3 is now relative to the location of z2
end
if f2 > f1+z1*RHO*d1 | d2 > -SIG*d1
break; % this is a failure
elseif d2 > SIG*d1
success = 1; break; % success
elseif M == 0
break; % failure
end
A = 6*(f2-f3)/z3+3*(d2+d3); % make cubic extrapolation
B = 3*(f3-f2)-z3*(d3+2*d2);
z2 = -d2*z3*z3/(B+sqrt(B*B-A*d2*z3*z3)); % num. error possible - ok!
if ~isreal(z2) | isnan(z2) | isinf(z2) | z2 < 0 % num prob or wrong sign?
if limit < -0.5 % if we have no upper limit
z2 = z1 * (EXT-1); % the extrapolate the maximum amount
else
z2 = (limit-z1)/2; % otherwise bisect
end
elseif (limit > -0.5) & (z2+z1 > limit) % extraplation beyond max?
z2 = (limit-z1)/2; % bisect
elseif (limit < -0.5) & (z2+z1 > z1*EXT) % extrapolation beyond limit
z2 = z1*(EXT-1.0); % set to extrapolation limit
elseif z2 < -z3*INT
z2 = -z3*INT;
elseif (limit > -0.5) & (z2 < (limit-z1)*(1.0-INT)) % too close to limit?
z2 = (limit-z1)*(1.0-INT);
end
f3 = f2; d3 = d2; z3 = -z2; % set point 3 equal to point 2
z1 = z1 + z2; X = X + z2*s; % update current estimates
[f2 df2] = eval(argstr);
M = M - 1; i = i + (length<0); % count epochs?!
d2 = df2'*s;
end % end of line search
if success % if line search succeeded
f1 = f2; fX = [fX' f1]';
% fprintf('%s %6i; Value %4.6e\r', S, i, f1);
s = (df2'*df2-df1'*df2)/(df1'*df1)*s - df2; % Polack-Ribiere direction
tmp = df1; df1 = df2; df2 = tmp; % swap derivatives
d2 = df1'*s;
if d2 > 0 % new slope must be negative
s = -df1; % otherwise use steepest direction
d2 = -s'*s;
end
z1 = z1 * min(RATIO, d1/(d2-realmin)); % slope ratio but max RATIO
d1 = d2;
ls_failed = 0; % this line search did not fail
else
X = X0; f1 = f0; df1 = df0; % restore point from before failed line search
if ls_failed | i > abs(length) % line search failed twice in a row
break; % or we ran out of time, so we give up
end
tmp = df1; df1 = df2; df2 = tmp; % swap derivatives
s = -df1; % try steepest
d1 = -s'*s;
z1 = 1/(1-d1);
ls_failed = 1; % this line search failed
end
end
function [C, dC] = backprop_gradient(v, network, X, targets, lambda)
%BACKPROP Compute the cost gradient for CG optimization of a neural network
%为共轭最优化算法构建损失函数和损失函数的梯度
% Initialize some variables
n = size(X, 1);
no_layers = length(network);
middle_layer = ceil(no_layers / 2);
% Deconvert the weights and store them in the network
ind = 1;
for i=1:no_layers
network{i}.W = reshape(v(ind:ind - 1 + numel(network{i}.W)), size(network{i}.W)); ind = ind + numel(network{i}.W);
network{i}.bias_upW = reshape(v(ind:ind - 1 + numel(network{i}.bias_upW)), size(network{i}.bias_upW)); ind = ind + numel(network{i}.bias_upW);
end
% Run the data through the network
%前馈传导计算得到网络的各层输出值
activations = cell(1, no_layers + 1);
activations{1} = [X ones(n, 1)]; %第一层网络是原始数据X,最后加上一列是bias
for i=1:no_layers
if i ~= middle_layer && i ~= no_layers
activations{i + 1} = [1 ./ (1 + exp(-(activations{i} * [network{i}.W; network{i}.bias_upW]))) ones(n, 1)];%激活函数是sigmiod函数
else
activations{i + 1} = [activations{i} * [network{i}.W; network{i}.bias_upW] ones(n, 1)];
end
end
% Compute value of cost function (= MSE)
C = (1 / (2 * n)) .* sum(sum((activations{end}(:,1:end - 1) - targets) .^ 2)) + lambda .* sum(v .^ 2);
%损失函数的第一项是一个均方差项,即网络的输出值activations与正确输出值targets的差。第二项是一个规则化项(也叫权重衰减项),其目的是减小权重v的幅度,防止过度拟合。对应上述文中的J(W,b)
% Only compute gradient if requested
if nargout > 1
% Compute gradients
dW = cell(1, no_layers);
db = cell(1, no_layers);
Ix = (activations{end}(:,1:end - 1) - targets) ./ n;
%计算最后一层(输出层)的残差,对应上文中的(1)
for i=no_layers:-1:1 %从倒数第二层开始,依次计算残差
% Compute update
delta = activations{i}' * Ix;%对应上文中的(3),即后一层的残差乘这一层的激活值。(激活值的最后一列为1)
dW{i} = delta(1:end - 1,:);
db{i} = delta(end,:);
% Backpropagate error
if i > 1
if i ~= middle_layer + 1
Ix = (Ix * [network{i}.W; network{i}.bias_upW]') .* activations{i} .* (1 - activations{i}); %计算各层的残差,对应上文中的(2)
else
Ix = Ix * [network{i}.W; network{i}.bias_upW]';
end
Ix = Ix(:,1:end - 1);
end
end%所有层的dW,db计算结束
% Convert gradient information
%把每层的dW和db汇合成一个列向量dC
dC = zeros(numel(v), 1);
ind = 1;
for i=1:no_layers
dC(ind:ind - 1 + numel(dW{i})) = dW{i}(:); ind = ind + numel(dW{i});
dC(ind:ind - 1 + numel(db{i})) = db{i}(:); ind = ind + numel(db{i});
end
dC = dC + 2 .* lambda .* v;
end参考文献:
UFLDL Tutorial















 1798
1798

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









