







串口可以说是嵌入式 Linux 系统必备的外设,系统终端通常都是串口。除了终端功能之外,实际应用中,Linux 系统也经常通过串口完成与其它设备的通信和数据传递。
Linux 的串口表现为设备文件。 Linux 的串口设备文件命名一般为/dev/ttySn( n=0、 1、2…..),若串口是 USB 扩展的,则串口设备文件命名多为/dev/ttyUSBn( n=0、1、2….)。当然这种命名规则不是绝对的,不同的硬件平台对串口设备文件的命名可能有所区别。在编写 Linux 串口的C程序代码时,需要包含termios.h头文件。该文件包含了 POSIX 终端属性描述结构 struct termios,该结构如下所示:
struct termios {
tcflag_t c_cflag // 控制标志 可设置串口的波特率、数据位、奇偶校验、停止位以及流控
tcflag_t c_iflag; //输入标志
tcflag_t c_oflag; // 输出标志
tcflag_t c_lflag; 本地标志
tcflag_t c_cc[NCCS]; 控制字符
};
//typedef unsigned int tcflag_t;
获取和设置终端属性:
使用函数 tcgetattr()可以获取串口设备的 termios 结构。该函数原型如下:
int tcgetattr(int fd, struct termios *termptr);函数执行成功返回 0, 串口设备的 termios 结构由 temptr 参数返回; 若出错则返回-1。
获得 termios 结构后,可以把串口的属性设置到 termios 结构中。串口属性设置完成后,
可通过 tcsetattr()函数把新的属性设置应用到串口中。 tcsetattr()函数原型如下:
int tcsetattr(int fd, int opt, const struct termios *termptr);在串口驱动程序里有输入缓冲区和输出缓冲区。 在改变串口属性时,缓冲区可能有数据
存在,如何处理缓冲区中的数据,可通过 opt 参数实现:
TCSANOW: 更改立即发生;
TCSADRAIN: 发送了所有输出后更改才发生,若更改输出参数则应用此选项;
TCSAFLUSH: 发送了所有输出后更改才发生,在更改发生时未读的所有输入数据被删除( Flush)。
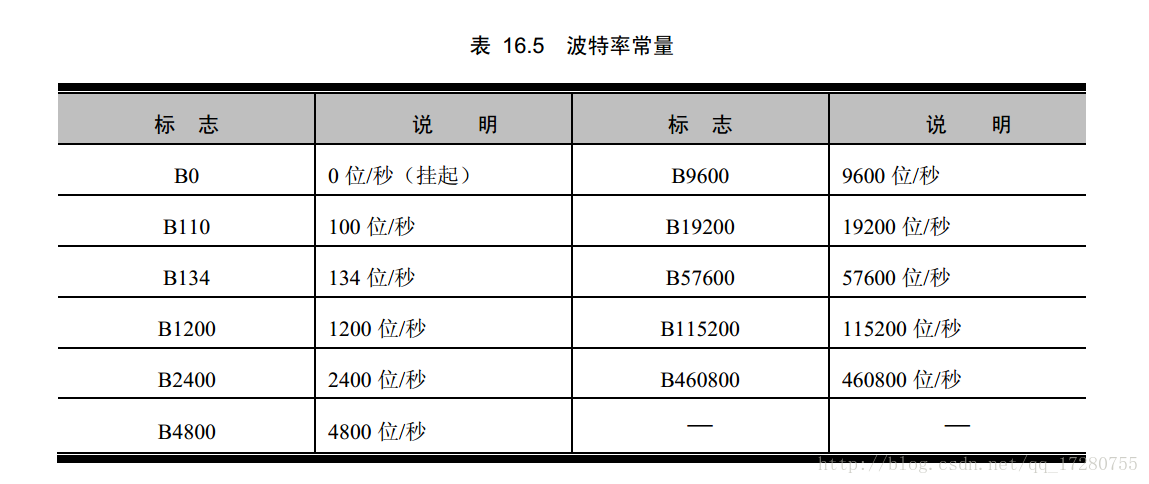
设置波特率
串口的波特率分输入波特率和输出波特率,可分别通过 cfsetispeed()和 cfsetospeed()函数设置。这两个函数原型为:
int cfsetispeed(struct termios *termptr, speed_t speed);
int cfsetospeed(struct termios *termptr, speed_t speed);这两个函数若执行成功返回 0,若出错则返回-1。 speed 参数为需要设置的波特率,可
选择的常量如表 16.5 所列。
设置数据位
设置串口数据位是在 termios 结构的 c_cflag 成员上设置,可用的选项标志如表 16.6 所
列。
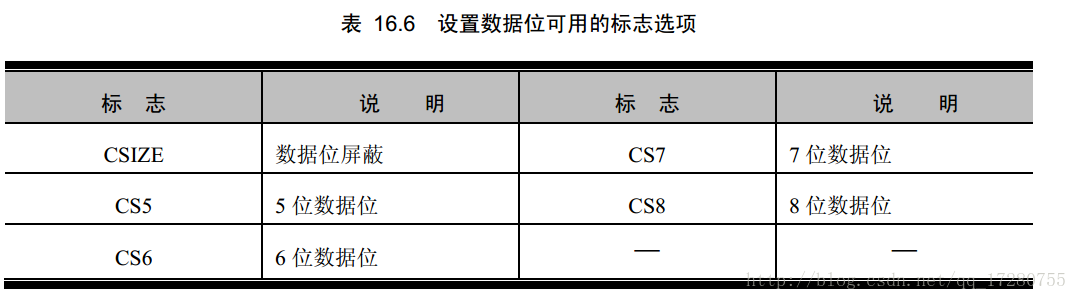
设置串口的数据位为 8 位的代码如下:
opt. c_cflag &= ~CSIZE;
opt. c_cflag |= CS8;设置奇偶校验
设置串口的奇偶校验是在 termios 结构的 c_cflag 成员上设置,可用的选项标志如表 16.7
所列。
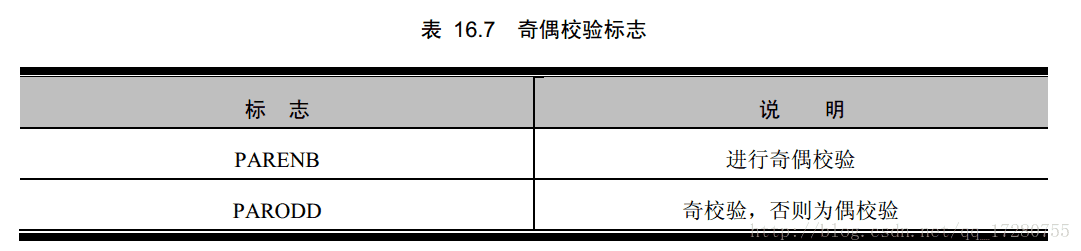
Linux 的串口驱动支持无校验(‘ N’)、偶校验(‘ E’)和奇校验(‘ O‘)。
设置无校验的方法为:
opt->c_cflag &= ~PARENB;设置偶校验的方法为:
opt->c_cflag |= PARENB;
opt->c_cflag &= ~PARODD;设置奇校验的方法为:
opt->c_cflag |= PARENB;
opt->c_cflag |= ~PARODD;设置停止位
设置串口停止位是在 termios 对象的 c_cflag 成员上设置,需要用到的选项标志为
CSTOPB( 2 位停止位,否则为 1 位)。
例如,设置 1 位停止位的方法为:
opt->c_cflag &= ~CSTOPB;其它设置
调用 read()函数读取串口数据时,返回读取数据的数量需要考虑两个变量: MIN 和 TIME。
MIN 和 TIME 在 termios 结构的 c_cc 成员的数组下标名为 VMIN 和 VTIME。
MIN 是指一次 read 调用期望返回的最小字节数。VTIME 说明等待数据到达的分秒数(秒
的 1/10 为分秒)。 TIME 与 MIN 组合使用的具体含义分为以下四种情形:
当 MIN > 0, TIME > 0 时
计时器在收到第一个字节后启动,在计时器超时之前( TIME 的时间到),若已收到 MIN
个字节,则 read 返回 MIN 个字节,否则,在计时器超时后返回实际接收到的字节。
当 MIN > 0, TIME = 0 时
MIN 个字节完整接收后, read 才返回,这可能会造成 read 无限期地阻塞。
当 MIN = 0, TIME > 0 时
TIME 为允许等待的最大时间,计时器在调用 read 时立即启动,在串口接到 1 字节数据或者计时器超时后即返回,如果是计时器超时,则返回 0。
当 MIN = 0, TIME = 0 时
如果有数据可用,则 read 最多返回所要求的字节数,如果无数据可用,则 read 立即返回 0。
设置 TIME 为 150、 MIN 为 255 的方法如下:
opt.c_cc[VTIME] = 150;
opt.c_cc[VMIN] = 255;串口编程实例
1、设置串口
//串口设置函数,波特率,数据位,校验位,停止位
//返回值:成功 = 0 ,失败 < 0
int set_opt(int fd)
{
struct termios newtio;
if ( tcgetattr( fd,&newtio) != 0)
{
perror("SetupSerial 1");
return -1;
}
bzero( &newtio, sizeof( newtio ) );
newtio.c_cflag |= CLOCAL | CREAD;//本地连接,接收使能
newtio.c_cflag &= ~CSIZE;
newtio.c_cflag |= CS8; //8位数据位
newtio.c_cflag &= ~PARENB; //无校验
cfsetispeed(&newtio, B115200);//输入波特率
cfsetospeed(&newtio, B115200);//输出波特率
newtio.c_cflag &= ~CSTOPB; //1位停止位
newtio.c_cc[VTIME] = 0;
newtio.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH); //清空终端未完成的输入/输出请求及数据。
if((tcsetattr(fd,TCSANOW,&newtio))!=0)
{
perror("com set error");
return -1;
}
return 0;
}2、打开串口
int serial_fd=0;
//打开串口
serial_fd = open( "/dev/ttyUSB0", O_RDWR|O_NONBLOCK);
if (serial_fd < 0)
{
printf("### ERROR:open serial failed\n");
return -1;
}
else printf("open serial success\n");
//设置串口
serial_set_code=set_opt(serial_fd);
if(serial_set_code < 0)
{
printf("### ERROR:set serial failed\n");
return -1;
}
else printf("set serial success\n");3、发送数据
int len;
char buf[] = "hello ZLG!";
len = write(fd, buf, sizeof(buf));
if (len < 0) {
printf("write data to serial failed! \n");
}4、读取数据
int len;
unsigned char buf[11];
len = read(fd, buf, 11);
if (len < 0){
printf("reading data failed \n");
}













 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









