






文章目录
前言
来源
通过网盘分享的文件:电机仿真
链接: https://pan.baidu.com/s/1lGCCiAyQd5DuQmvkWSiSvg?pwd=1234 提取码: 1234
–来自百度网盘超级会员v5的分享
一、BLDC速度控制
1.整体框架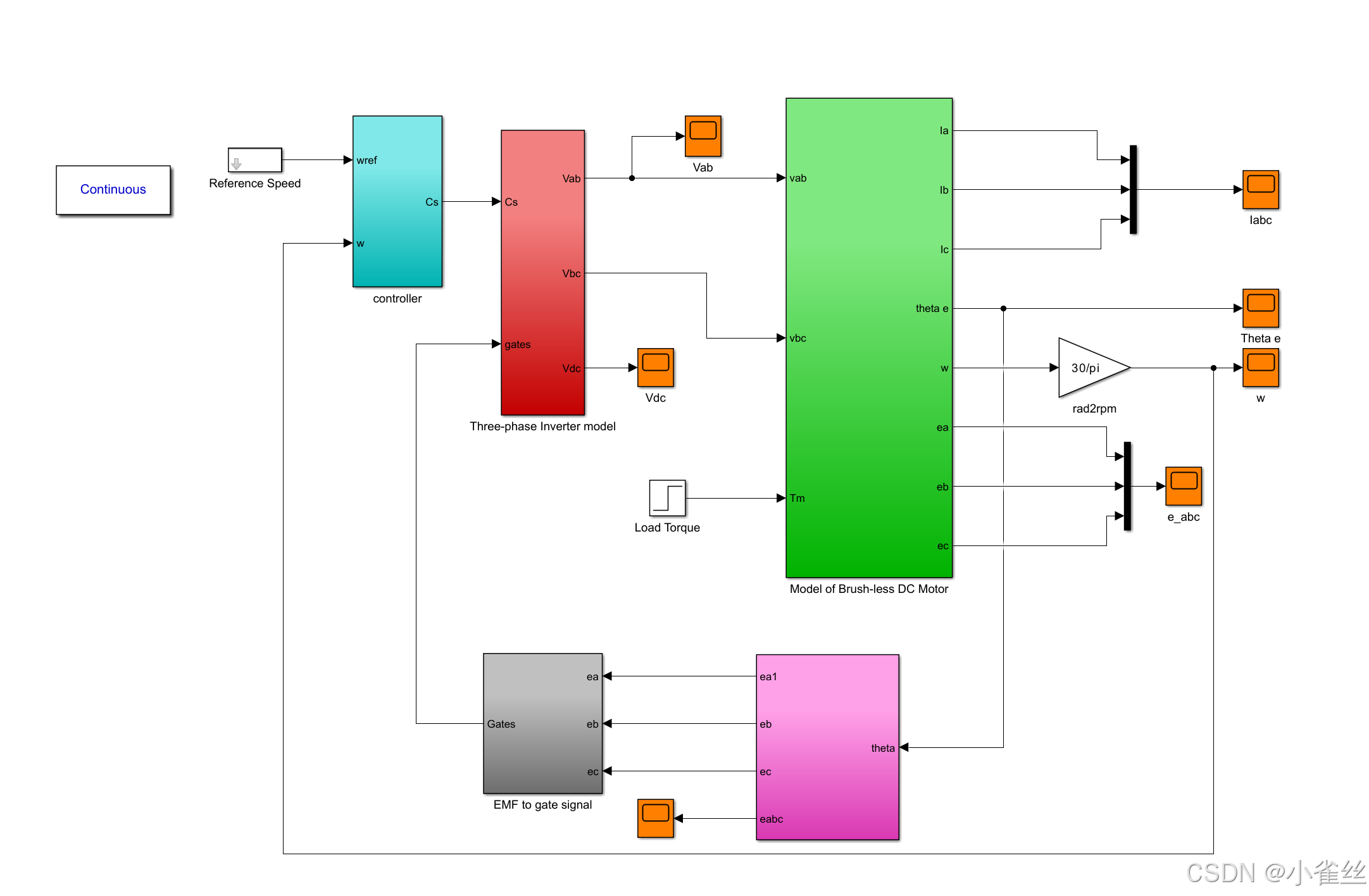
2.速度PI控制模块

速度环PI调节模块,输入期望值(wref)和实际值(w),经过比例和积分运算后得出目标差值
模块功能
核心作用:生成按用户指定时间点变化的信号,常用于控制系统中设定参考速度、目标值或触发事件。
特性:
允许在多个时间点定义信号值。
若未在 t=0 定义初始值,输出从0开始,直到第一个指定时间点才切换。
信号在相邻时间点之间保持常数值(分段常数信号)。
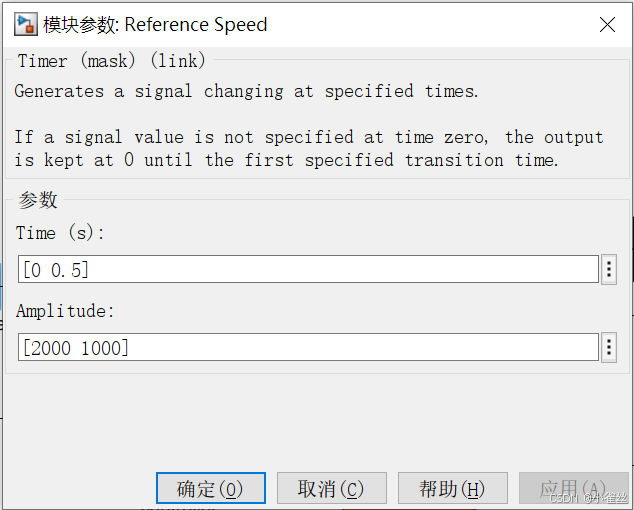
2. 关键参数详解
(1) Time (s) 参数
格式:[t₁ t₂ … tₙ](时间点数组,单位秒)
作用:定义信号变化的时间节点。
示例:[0 0.5] 表示信号在 t=0 和 t=0.5 时发生跳变。
行为:
时间点需按升序排列。
最后一个时间点后的信号值保持不变。
(2) Amplitude 参数
格式:[v₁ v₂ … vₙ](幅度值数组)
作用:对应每个时间点的信号值。
示例:[2000 1000] 表示:
t=0 时,信号值为 2000;
t=0.5 时,信号跳变至 1000,之后保持 1000。
(3) 初始值处理
若未在 Time (s) 中包含 0,则:
t<0 时输出为 0;
0 ≤ t < t₁ 时(t₁ 为首个时间点),输出为 v₁。
2.电压生成模块
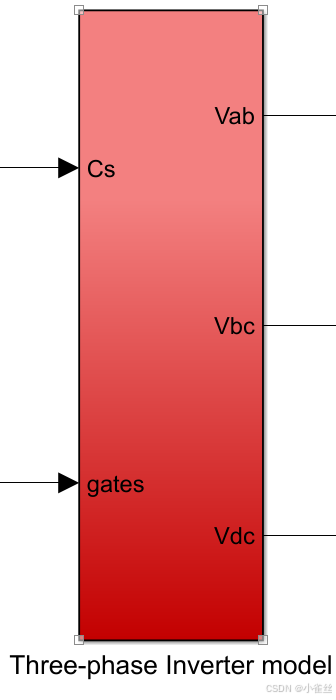
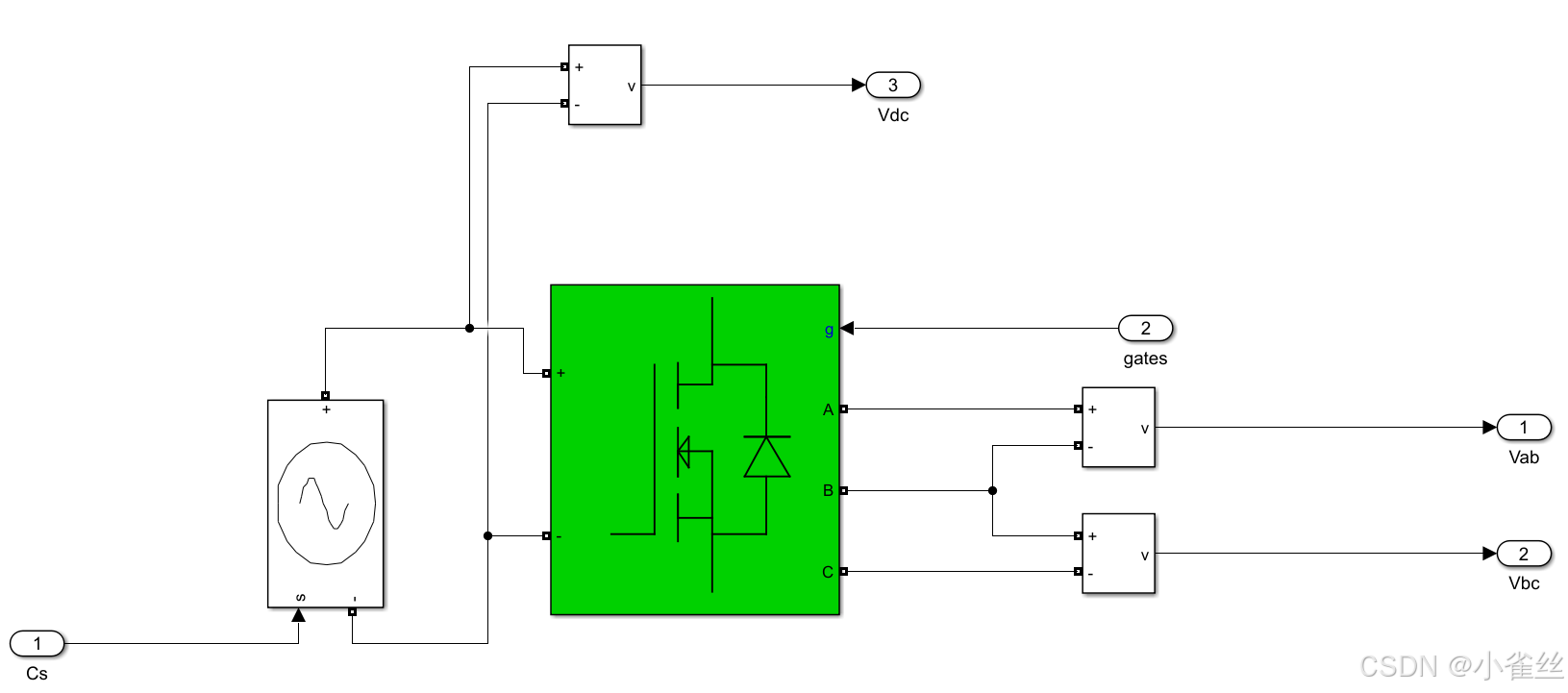
输入片选信号和门信号
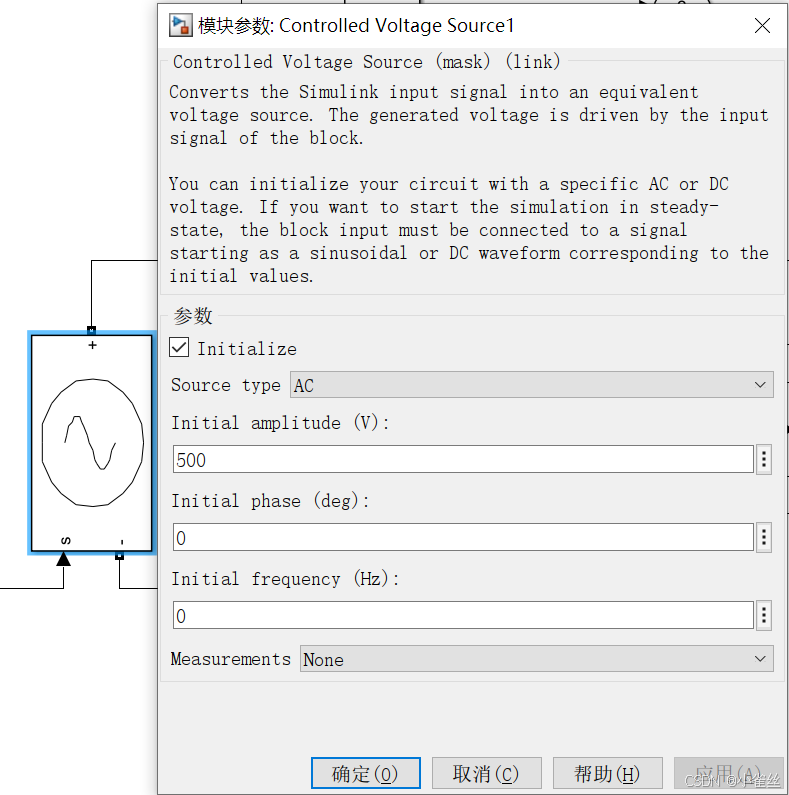
2. 关键参数详解
(1) Initialize(初始化)
作用:设置仿真起始条件,决定是否使用初始电压值跳过瞬态过程,直接从稳态开始仿真。
已勾选(√):
仿真从 t=0 开始时,电压源立即输出初始设定的电压(而非从零渐变)。
必要性:若需模拟电路在稳态下的行为(如直流电机堵转测试),必须启用此选项。
(2) Source type(信号类型)
选项:AC(交流)或 DC(直流)。
当前设置:AC(交流)
注意:
若选择 AC,需同时指定 频率(Hz) 和 相位(deg)。
若选择 DC,则 频率 应设为 0,相位 无意义。
(3) Initial amplitude(初始幅值)
单位:伏特(V)
当前值:500 V
作用:
对于 AC 信号:定义交流电压的峰值(如 500 sin(2πft + φ))。
对于 DC 信号:直接定义直流电压值(如 500 V)。
(4) Initial phase(初始相位)
单位:度(deg)
当前值:0°
作用:
设置交流信号的初始相位角(0° 表示正弦波从零点开始)。
示例:φ=90° 对应 sin(2πft + 90°) = cos(2πft)。
(5) Initial frequency(初始频率)
单位:赫兹(Hz)
当前值:0 Hz
作用:
仅当 Source type=AC 时生效。
频率为 0 的矛盾:
若 Source type=AC 且 Frequency=0,Simulink 会将其视为无效输入,可能导致仿真错误。
正确做法:
若需直流电压,应设置 Source type=DC + Frequency=0。
若需交流电压,需设置 Frequency>0(如 50 Hz)。
(6) Measurements(测量配置)
选项:None(不测量)或 Voltage(测量输出电压)。
当前设置:None
作用:
若选择 Voltage,模块会输出一个附加信号,反映其实际输出电压(可用于示波器观测或后续计算)。
3.电机模型
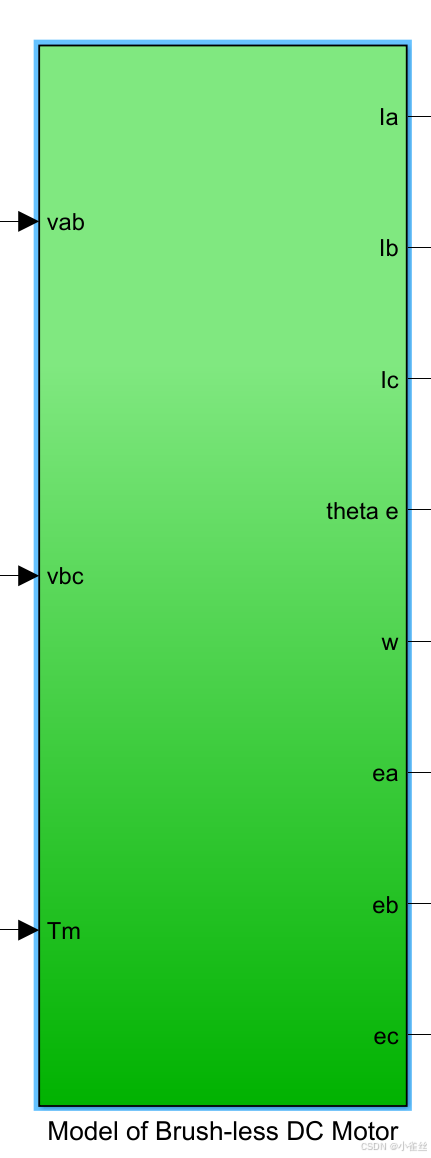
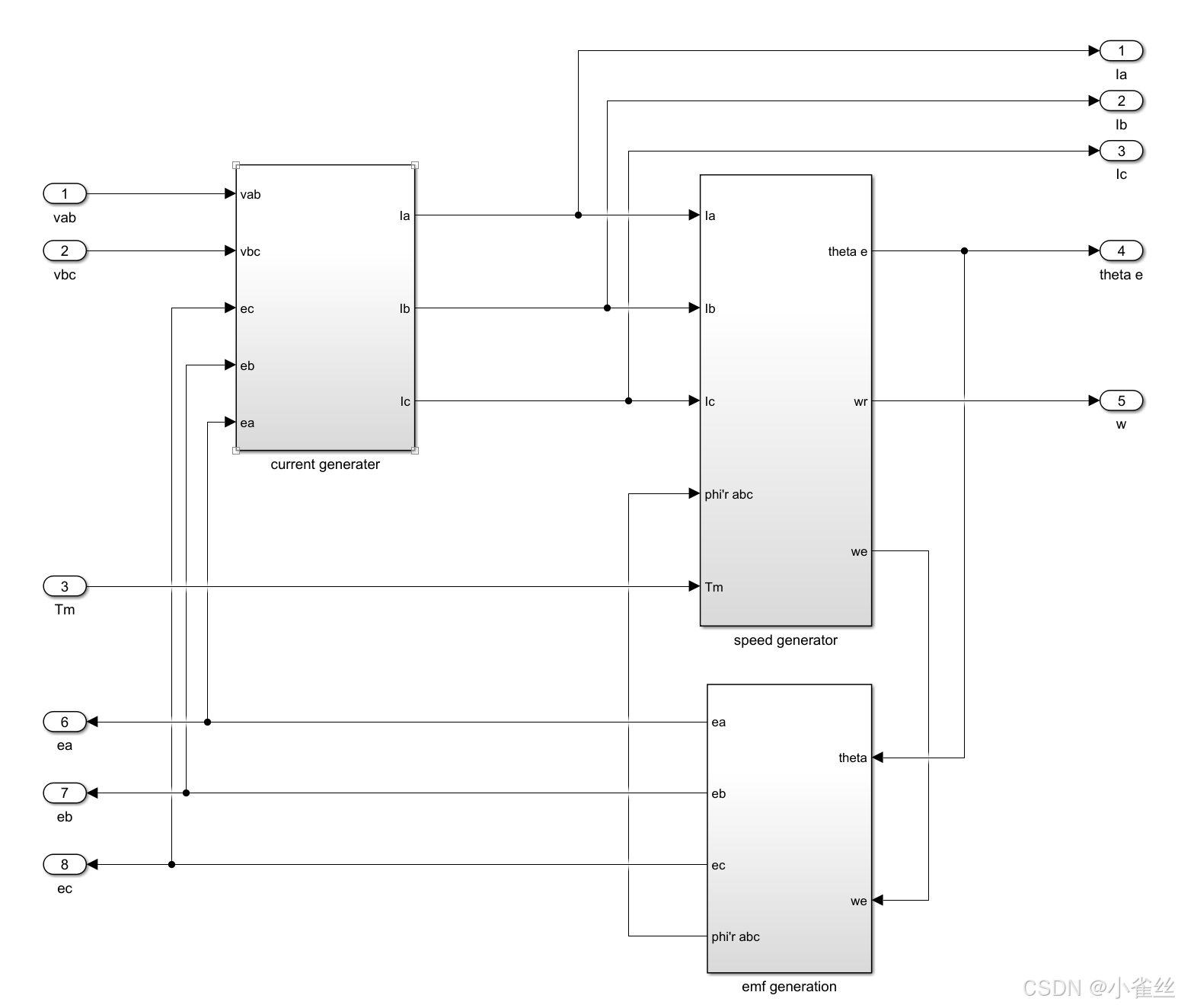
电机模型,输入电压,转矩;输出电流,角度,反电动势。
(为什么只输入两相电压?、
Vac的实际存在形式
隐含在电路拓扑中:
星形连接:若电机绕组为星形接法(Y型),中性点可能接地或短接,Vac 无需单独标注。
三角形连接:若为三角形接法(Δ型),Vac 可能通过节点间的电压差计算得出(如 Vab + Vbc + Vca = 0)。
模块内部处理:
gates 模块可能直接使用 Vab/Vbc 计算 Vac(如通过减法器 Vca = Vab + Vbc),无需在图中显式标注。)
内部分为电流产生器,速度产生器,反电动势产生器
4.反电动势生成模块
输入角度得到反电动势
5.反电动势转化成门信号
这里通过反电动势得到驱动逆变器的门信号
司机(控制器 troller)
→ 油门踏板(Gates/PWM信号)
→ 发动机(逆变器 gates 模块)
→ 车轮(电机/负载)
← 车速表(反电动势 ea/ec/eb)
2. 详细流程解析
第一步:反电动势是电机的“车速表”
什么是反电动势?
当电机转动时,会在绕组中产生与转速成正比的电压(ea、eb、ec),就像车速表反映车速一样。
作用:
反电动势告诉控制器:“电机现在转速是多少?”、“负载有多大?”
例:电机堵车时(负载大),反电动势会升高(类似车速表指针飙升)。
第二步:控制器是“司机”
输入信号:
Cs:电流传感器信号(类似车速表的油量报警)。
ea/ec/eb:反电动势(车速表读数)。
处理逻辑:
比较目标转速(参考值)与实际转速(反电动势换算)。
例:司机发现车速(实际转速)低于目标,就踩油门(生成PWM信号)。
输出:
PWM信号(油门深度) → 控制 gates 模块。
第三步:Gates模块是“油门踏板”
功能:
将PWM信号(油门深度)转换为开关指令,控制逆变器中的IGBT/MOSFET(燃油喷射系统)。
关键动作:
开闸:让直流电(Vdc)通过开关器件,形成交流电压(Vab/Vbc)。
关闸:切断电流,调整输出电压幅值和频率。
第四步:逆变器是“发动机”
输入:
Vdc:燃油(电能)
gates:点火指令(PWM信号)
输出:
Vab/Vbc:驱动电机的交流电(动力输出)
工作原理:
通过快速开关器件(如6个IGBT),将直流电“斩波”成三相交流波形。
例:PWM占空比=50% → 输出电压为Vdc×50%。
第五步:闭环反馈
电流传感器 Cs:
实时监测电机电流(类似车速表的油耗传感器)。
若电流过大(超载),控制器会立刻松开油门(降低PWM),防止烧毁电机。
反电动势反馈:
持续修正PWM信号,确保电机转速稳定(类似司机根据路况微调油门)。


















 94
94

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









