




 本文介绍了作者使用OpenCV实现立体视觉的过程,包括摄像头标定、立体标定、图像校准和匹配的详细步骤。通过Matlab工具箱进行摄像头内外参数标定,并将结果导入OpenCV进行后续处理。在立体匹配部分,使用了Block Matching方法,并探讨了参数设置对匹配效果的影响。此外,文章还提出了在cvStereoCalibrate中遇到的问题以及对Translation向量的疑惑。
本文介绍了作者使用OpenCV实现立体视觉的过程,包括摄像头标定、立体标定、图像校准和匹配的详细步骤。通过Matlab工具箱进行摄像头内外参数标定,并将结果导入OpenCV进行后续处理。在立体匹配部分,使用了Block Matching方法,并探讨了参数设置对匹配效果的影响。此外,文章还提出了在cvStereoCalibrate中遇到的问题以及对Translation向量的疑惑。
尝试用OpenCV来实现立体视觉也有一段时间了,主要的参考资料就是Learning OpenCV十一、十二章和OpenCV论坛上一些前辈的讨论。过程中磕磕碰碰,走了不少弯路,终于在前不久解决了最头大的问题,把整个标定、校准、匹配的流程调试成功。(虽然还有一些问题至今尚未搞清)
在这里写这篇文章,第一方面是给自己一个总结,第二方面是感觉OpenCV立体视觉方面的资料还是相当零散和不完整,新手入门需要花很长时间才能摸索出来,第三方面,也是自己在过程中有些问题仍旧迷迷糊糊,希望可以抛砖引玉。
1. 摄像头
我用的摄像头是淘宝上买的三维摄像头,两个USB Camera加一个可调节的支架。实物照片如下

1.1 三维摄像头实物图
双USB摄像头的OpenCV驱动可以参考以下链接
http://www.opencv.org.cn/index.php/使用DirectShow采集图像
将上面代码复制到自己的工程之后还需要对工程或者编译环境做一下设置
VC6下的详尽设置可以见代码的注释(修改工程的属性)
VS2008中的设置也可以参照代码注释中VC++2005的设置(修改编译环境)
2. 标定
由于OpenCV中cvStereoCalibrate总是会得到很夸张的结果(见下文5.1问题描述),所以最后还是决定用Bouguet的Matlab标定工具箱立体标定,再将标定的结果读入OpenCV,来进行后续图像校准和匹配。
Matlab标定工具箱的参考链接如下:
http://www.vision.caltech.edu/bouguetj/calib_doc/
上面有详细的使用步骤,用起来相当的方便。
以下是我个人用Matlab工具箱进行立体标定的步骤,供参考,如果需要更详细步骤的话还是参照上面的链接
把Matlab工具箱的文件copy到对应目录下,把所要标定的棋盘图也放到.m文件所在的目录下,然后在Matlab命令行窗口中打入calib_gui,选择Standard之后便出现以下窗口

2.1. calilb_gui面板
我们先对右摄像头的标定,所以先把从右摄像头上采集到的棋盘图复制到工具箱目录下。
点击Image names, 命令行窗口会提示你输入图片的basename以及图片的格式(比如你图片文件名是right1, right2, …, right10,basename就是right),然后Matlab会自动帮你读入这些图片,如下图所示,可以看到,读入了10幅右摄像头的棋盘图。
采集棋盘图的时候要注意,尽量让棋盘占据尽可能多的画面,这样可以得到更多有关摄像头畸变方面的信息

2.2. 图像basename读入
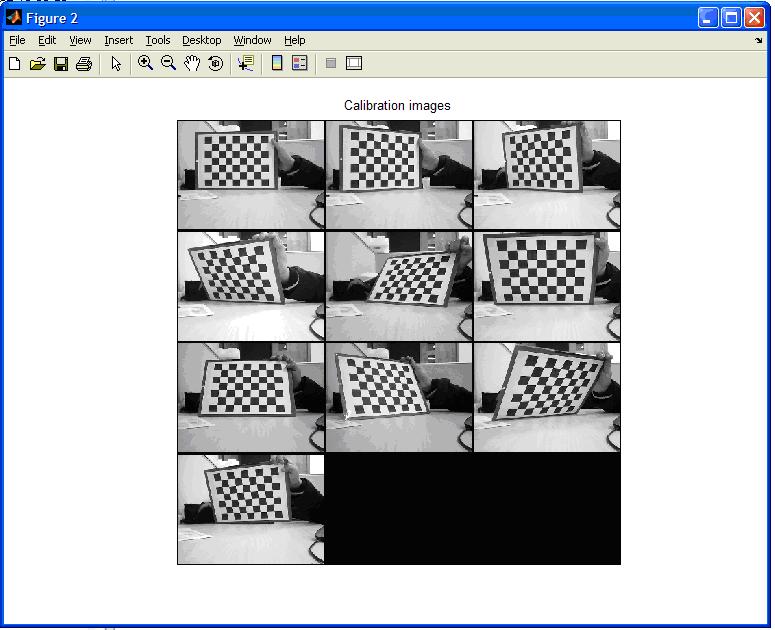
2.3. 读入的棋盘图
&nb
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 4535
4535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









