







 本文深入探讨了利用OpenCV进行立体视觉的实践,重点介绍了StereoSGBM算法,一种半全局匹配方法,用于解决双目视觉中的深度检测和视差计算问题。虽然比BM算法计算量大,但能获得更清晰的视差图。通过链接可查阅OpenCV官方文档获取更多详情。
本文深入探讨了利用OpenCV进行立体视觉的实践,重点介绍了StereoSGBM算法,一种半全局匹配方法,用于解决双目视觉中的深度检测和视差计算问题。虽然比BM算法计算量大,但能获得更清晰的视差图。通过链接可查阅OpenCV官方文档获取更多详情。
立体视觉 是通过图像间的对应关系,根据三角测量原理,得到视差图,主要过程包括:摄像机标定、立体标定、立体校正、计算视差图。
在得到视差信息后,很容易根据投影模型 计算原始图像的深度,立体匹配技术被 认为是立体视觉中最困难也是最关键的问题,容易受 光照、噪声、非显著纹理(特征)等问题影响,无法得到较好的匹配效果。
本节主要讲解 OpenCV 自带立体视觉模块 StereoSGBM 。
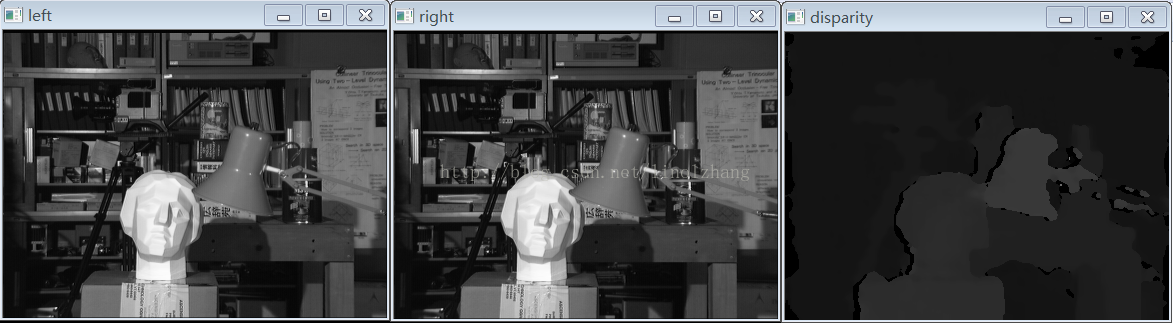
StereoSGBM 是一种 半全局匹配算法,对比 BM算法 StereoBM (块匹配,Block Matching)视差图轮廓更清晰,但是计算量稍大。
详细说明可以参考OpenCV的在线文档:http://opencv.willowgarage.com/documentation/cpp/camera_calibration_and_3d_reconstruction.html
来看实现效果:
参考代码:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 25万+
25万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









