







 本文介绍了如何使用Visual Studio和OpenCV3.1结合立体视差图进行三维点云重建。基本原理涉及双目视觉的基本概念,详细步骤可参考指定文章。在VS中配置opencv3.1、openNI和PCL后,通过代码实现点云重建。文章附带了代码示例及效果展示。
本文介绍了如何使用Visual Studio和OpenCV3.1结合立体视差图进行三维点云重建。基本原理涉及双目视觉的基本概念,详细步骤可参考指定文章。在VS中配置opencv3.1、openNI和PCL后,通过代码实现点云重建。文章附带了代码示例及效果展示。
转载请注明原创出处:http://blog.csdn.net/u014283958/
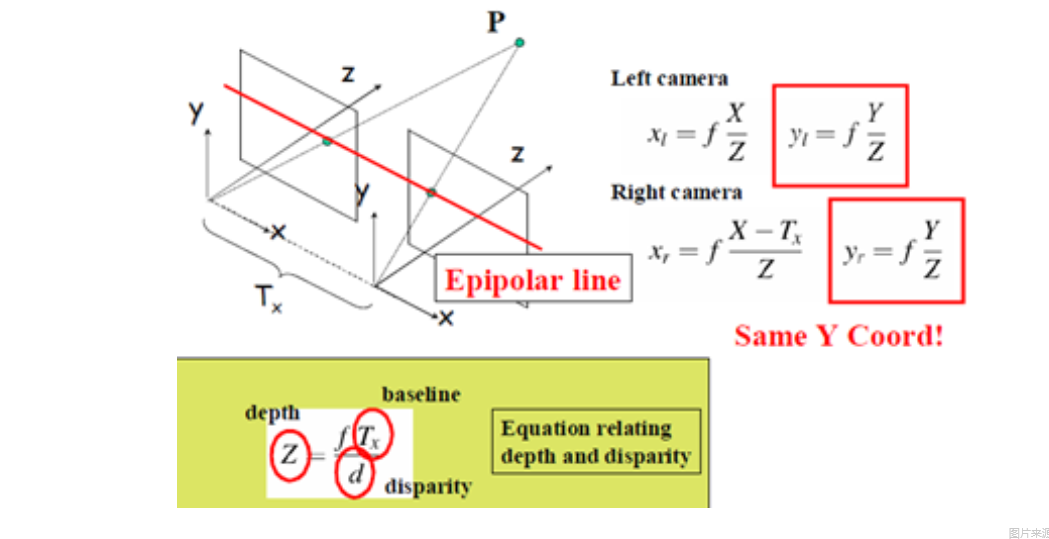
基本原理
详细原理请阅读这篇文章http://www.360doc.com/content/14/0205/15/10724725_349968116.shtml.
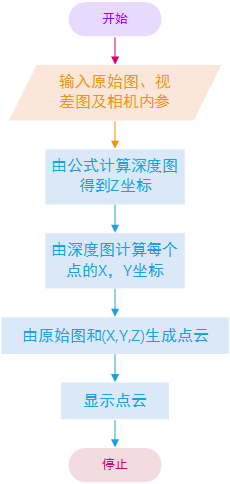
基本流程
代码
本代码运行需要在VS上配置好opencv3.1+openNI+PCL,opencv3.1的配置可以在网上找到很多资料,openNI和PCL的配置可以参看上一篇博文下http://blog.csdn.net/u014283958/article/details/52599457
下面是代码:
//by shuishui shiwenjun 20160926
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <opencv2/opencv.hpp>
using namespace 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









