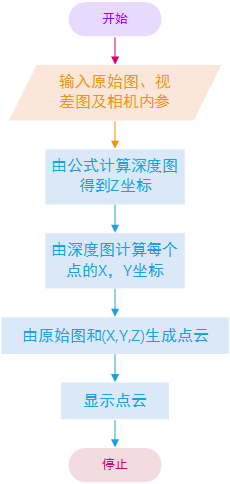
实现双目立体视觉三维重建的C++代码如下:
首先,需要包含OpenCV库的头文件:
#include <opencv2/opencv.hpp>
然后,定义双目相机的参数:
cv::Mat cameraMatrix1; // 左相机内参矩阵
cv::Mat distCoeffs1; // 左相机畸变系数
cv::Mat cameraMatrix2; // 右相机内参矩阵
cv::Mat distCoeffs2; // 右相机畸变系数
然后,定义图片路径和文件名:
std::string leftImagePath = "left.jpg"; // 左图路径和文件名
std::string rightImagePath = "right.jpg"; // 右图路径和文件名
加载左右图片:
cv::Mat leftImage = cv::imread(leftImagePath, cv::IMREAD_GRAYSCALE);
cv::Mat rightImage = cv::imread(rightImagePath, cv::IMREAD_GRAYSCALE);
接下来,根据相机参数计算立体校正映射矩阵:
cv::Mat R, T, R1, R2, P1, P2, Q;
cv::stereoRectify(cameraMatrix1, distCoeffs1, cameraMatrix2, distCoeffs2, leftImage.size(), R, T, R1, R2, P1, P2, Q);
定义校正后的左右图像:
cv::Mat rectifiedLeftImage, rectifiedRightImage;
使用立体校正映射矩阵对左右图像进行校正:
cv::remap(leftImage, rectifiedLeftImage, R1, P1, cv::INTER_LINEAR);
cv::remap(rightImage, rectifiedRightImage, R2, P2, cv::INTER_LINEAR);
接下来,使用SGBM(Semi-Global Block Matching)算法计算视差图:
cv::Mat disparityMap;
int minDisparity = 0;
int numDisparities = 16;
int blockSize = 3;
int P1 = 8 * leftImage.channels() * blockSize * blockSize;
int P2 = 32 * leftImage.channels() * blockSize * blockSize;
cv::StereoSGBM stereoSGBM(minDisparity, numDisparities, blockSize, P1, P2);
stereoSGBM(rectifiedLeftImage, rectifiedRightImage, disparityMap);
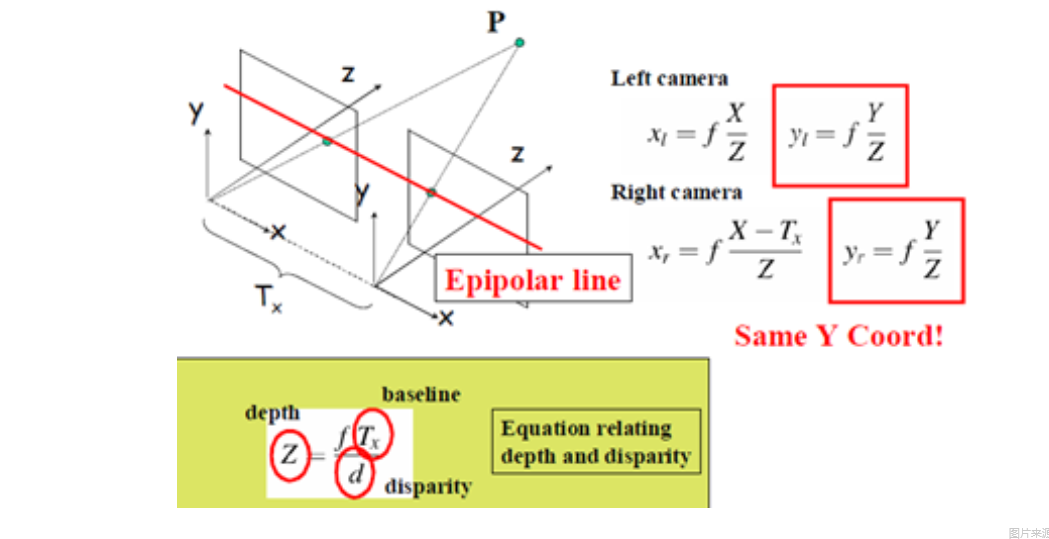
通过视差图计算深度图:
cv::Mat depthMap;
double f = cameraMatrix1.at<double>(0, 0);
double B = abs(T.at<double>(0, 0)); // 双目相机基线长度
cv::divide(f * B, disparityMap, depthMap);
最后,将深度图进行可视化:
cv::normalize(depthMap, depthMap, 0, 255, cv::NORM_MINMAX, CV_8U);
cv::imshow("Depth Map", depthMap);
cv::waitKey(0);
这段代码实现了双目立体视觉三维重建,通过计算立体校正映射矩阵、视差图和深度图,可以得到场景的三维结构和深度信息。








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









