







 本文介绍了光流的基本概念,重点阐述了Lucas-Kanade(LK)光流算法,包括其三个基本假设和基于图像金字塔的改进方法。讨论了OpenCV中的cvCalcOpticalFlowPyrLK函数在目标跟踪中的应用,并提供了示例程序及运行结果。文章末尾推荐了深入理解LK算法的博客资源。
本文介绍了光流的基本概念,重点阐述了Lucas-Kanade(LK)光流算法,包括其三个基本假设和基于图像金字塔的改进方法。讨论了OpenCV中的cvCalcOpticalFlowPyrLK函数在目标跟踪中的应用,并提供了示例程序及运行结果。文章末尾推荐了深入理解LK算法的博客资源。
这几天主要看了光流的有关内容,下面就关于光流的有关内容进行个简单的总结。
所谓的光流是一种运动模式,这种运动模式即是指一个物体、表面、边缘在一个视角下由一个观察者和背景之间形成的明显移动。在如下的图中给出了光流的直观解释。
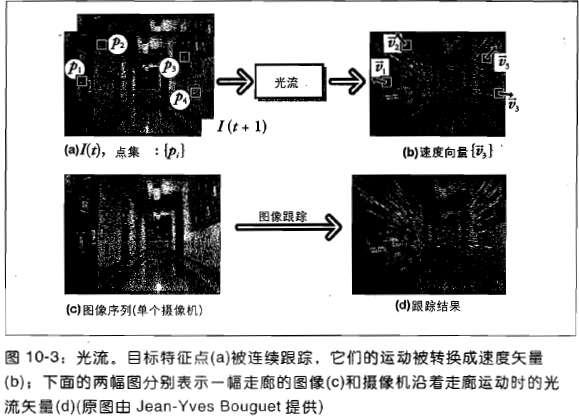
这里的每个像素都与速度相关联,这样得到的即是稠密光流,在光流中主要分为稠密光流和稀疏光流,相对于稠密光流,稀疏光流的计算则需要在跟踪之前指定一组点,下面我主要介绍下比较流行的基于金字塔的Lucas-Kanade光流算法。
(1)LK算法
LK算法其实是基于三个假设进行的:
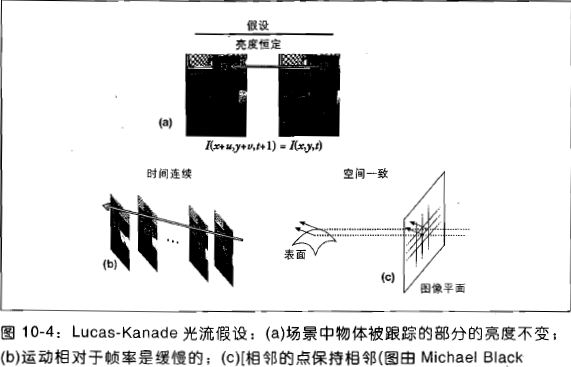
a.亮度恒定。图像场景中目标的像素在帧间运动时外观上保持不变,对于灰度图像,需要假设像素被逐帧跟踪时其亮度不发生变化。这样的假设,我们可以用下面的数学表达式来表达:

也即是亮度I对时间t的偏导数为0,即:
b.时间连续或者运动是“小运动”。图像的运动随时间的变化比较缓慢。实际应用中指的是时间变化相对于图像中运动的比例要足够小,这样目标在帧间的运动就比较小。
这条假设,就只能针对小运动,但实际上的运动往往是比较大的运动,这时我们就会将现在的LK算法加以改进,采用基于图像金字塔的LK算法,这在后面将进一步进行介绍。
针对这条假设,换句话说,可以将运动的变化看成是亮度对时间的导数,此时将f(x,t)用I(x(t),t)替换,应用偏微分的链式法则即可得到:

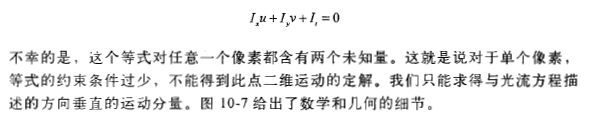
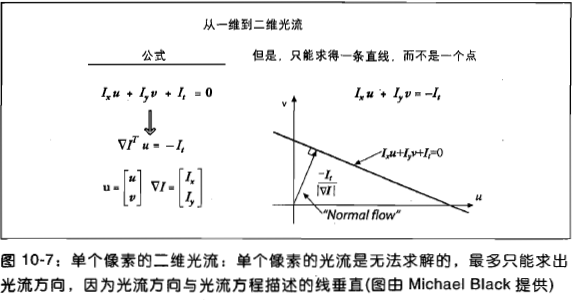
我们接着将从一维的情况过渡到二维的情况下去分析即得到:
c.空间一致性假设。一个场景中同一表面上邻近的点具有相似的运动,在图像平面上的投影也在邻近区域。
下面的这幅图,直观的给出了上述的三条假设。
但垂直光流由孔径问题产生,即用小孔或者小窗口去测量运动。这种情况下,我们通常只能观测到边缘而观测不到角点,而只靠边缘是不足以判断整个物体是如何运动的,如下图解释的那样:
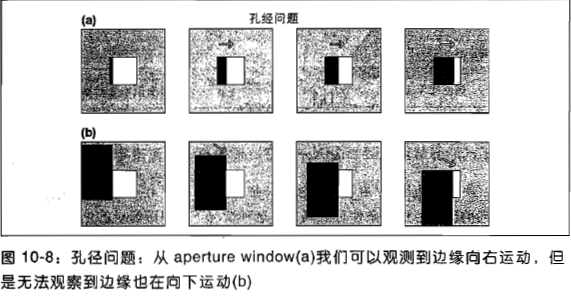
单像素是不能解决整个运动的,要想解决这样的一个问题,需用到光流的最后一个假
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3290
3290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









