






大纲
1、介绍
2、立体视觉系统概述
3、视觉匹配算法
4、计算优化
5、硬件实现
6、应用
介绍
立体视觉旨在通过两个或者多个摄像机对物体进行拍照,从图像推断物体的深度(相关几何信息),在计算机视觉方面得到了广泛的研究。本文主要介绍了双目立体视觉系统、立体视觉算法、立体视觉应用以及重点分析了一些实时性和可物理实现性较好的方法。
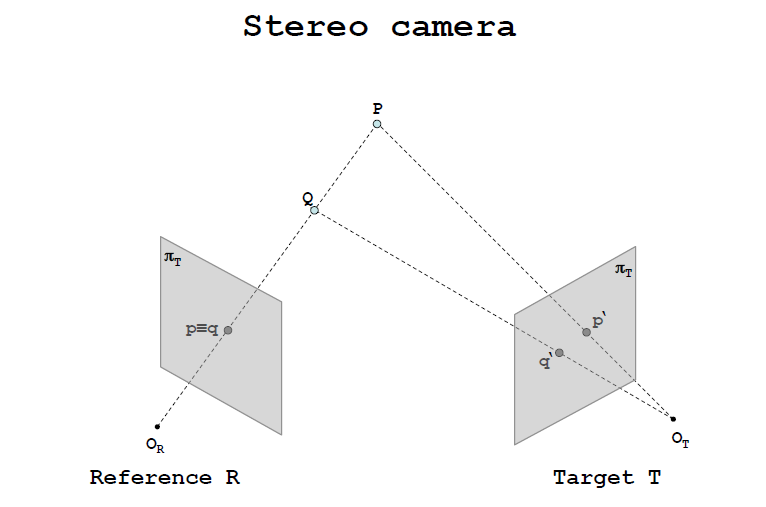
将物体抽象为质点,当多个物体与摄像机的镜头的光心保持一条直线时,在照片上显示的只有一个点,也就意味着从相片上并不能辨别出这两个物体。而双目视觉利用两个摄像机从不同位置进行摄像,我们就能根据两者所成的像在两个相片中对应点的关系从而实现对物体的深度进行计算。因此,寻找物体在两幅图像中的对应点成了关键问题。
根据双目立体视觉的物理结构和成像原理可以抽取出如下的几何关系。
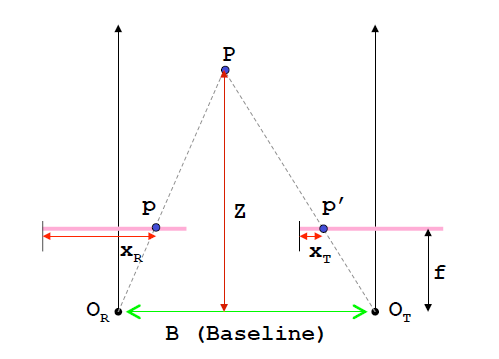
则深度Z的计算公式为:
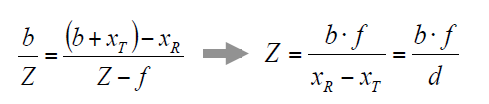
其中B为基线(baseline)的长度,表示两个相机光心的距离;f为相机的焦距;d为视差。
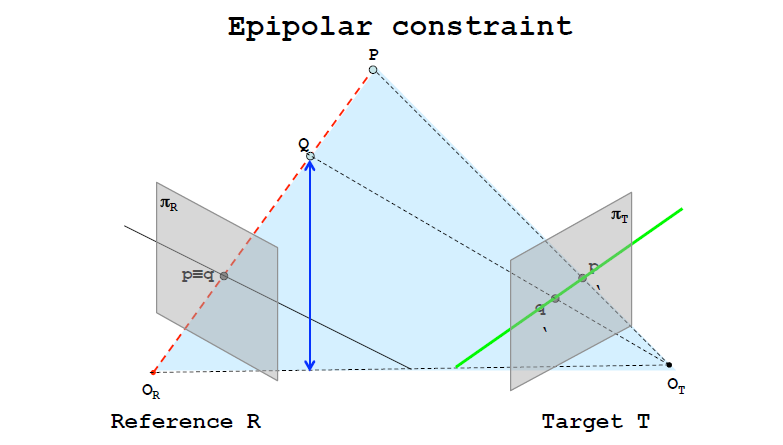
考虑两点P和Q在参考图像的同一视线上(即两者在该摄像机的像平面上投影为同一个点)。而极线(epipolar)约束指的是在图中红线上的点在另一个像平面(目标图像)中的绿线上。因此,我们就可以对应点的搜索空间从二维转化为了一维。将两个像平面水平放置,我们就可以根据这个约束,让对应的点在同一条直线上。(满足极线约束需要摄像机的摆放位置满足一定的条件,否则需要校正)
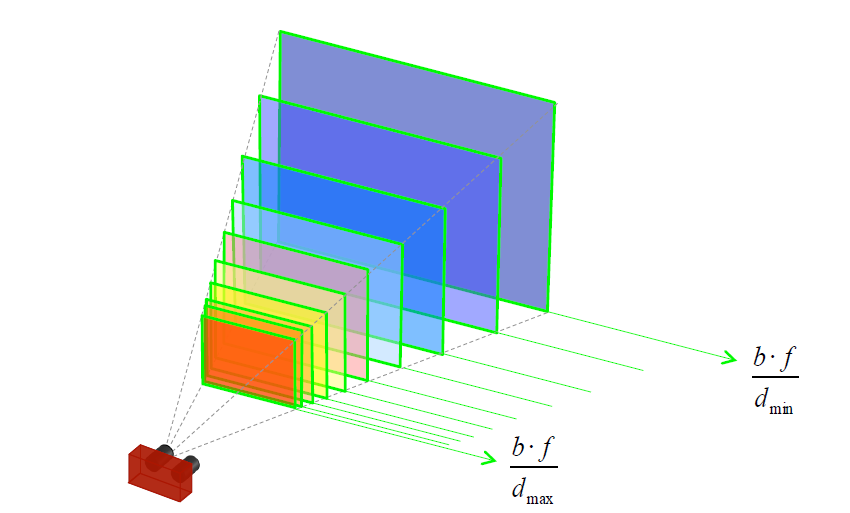
进一步将立体视觉系统进行投影至二维平面,我们就可以根据几何关系计算物体到摄像机的距离(深度;depth),而在两个像平面投影位置在像平面坐标系下的差值称为视差(disparity)。视差是同一点在不同像平面坐标值X的差值,视差值越大,物体距摄像机越近。对于一个给定参数的双目立体视觉系统,它的视界(horopter)即所能观察的视觉范围是有限的。它首先预视差值D的上下界。每一个视差值对应于一个深度,那么就可以按照视差值的不同将视界离散化一个个平面。















 864
864

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









