






本文翻译的外国学者的一份talk,主要内容是关于立体视觉算法和应用的基础知识。限于个人水平,如有疏漏之处请谅解。
大纲
3、视觉匹配算法
4、计算与优化
5、硬件实现
6、应用
视差计算与优化
这一步旨在最好的视差分配最小化一个代价函数,大多数情况使用能量函数,而能量函数包含两部分。
其中数据项E(data)测度这种视差分配与立体图像对的符合程度,有些有效使用support聚合的依赖简单的基于像素的代价函数的方法也可以在这其中被使用。另一个平滑项(正则项)E(smooth)要求图像满足enforces piecewise assumptions,利用这一项来惩罚比较大的视差变化且大的变化只能发生在深度的边界处。因为寻找最好的视差分配使得能量函数最小化是一个NP难的问题,所以推荐使用近似的方法来估计能量函数最小值的策略。相关的方法有:Graph Cuts、Belief Propagation、Cooperative optimization等。一类近似的最小化关于一组点对的能量函数的优化问题可以使用DP(Dynamic Programming)或者SO(Scanline Optimization)来解决。
Dynamic Programming (DP)
动态规划方法的算法执行效率比较好;采用ordering constraint;在深度边界和不均匀区域的精度较好;但是有拖尾现象。

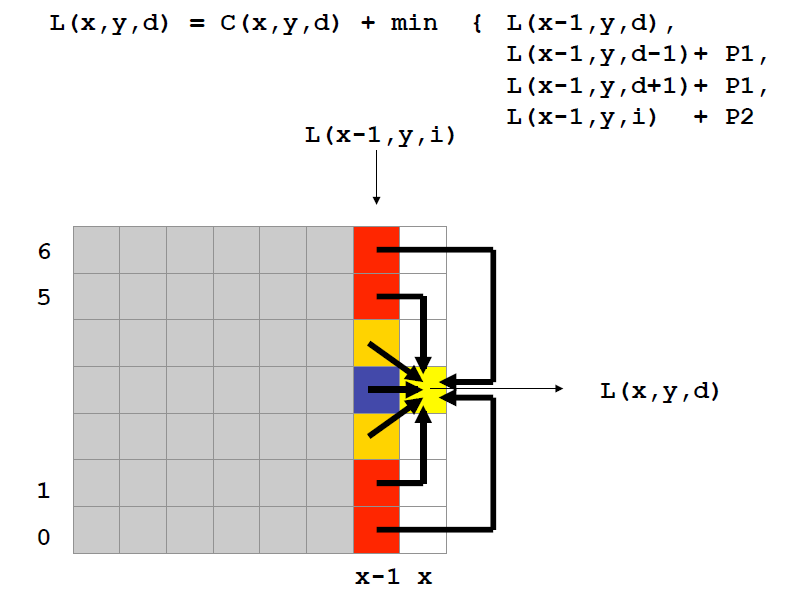
Scanline Optimization (SO)
扫描线优化的算法效率没有DP好,但在深度边界和不均与区域也有良好的精确性;客服了拖尾现象;但需要较高的内存开销。SO算法可以和support aggregation算法结合,但受代价聚合的影响运行的速率很慢。

在SO算法中,代价的定义式为:
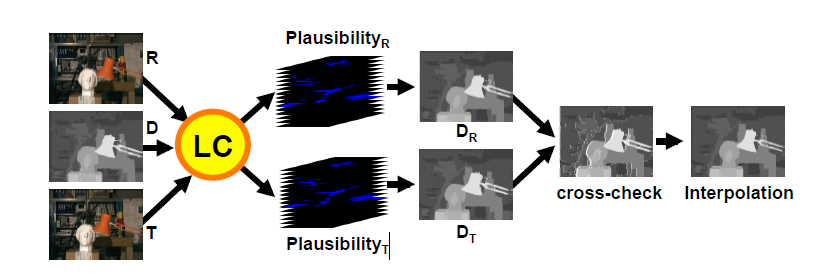
SO/DP +LC
这个方法旨通过执行LC的初始的视差假设来提升基于SO/DP的算法精度。利用 dense stereo algorithm提供的初始的密度视差假设(initial dense disparity hypotheses),执行LC 技术获得两个独立的视差场D(R)和D(L),然后在根据这两个图进行检测并插值。















 864
864

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









