






本文翻译的外国学者的一份talk,主要内容是关于立体视觉算法和应用的基础知识。限于个人水平,如有疏漏之处请谅解。
大纲
2、立体视觉系统概述
3、视觉匹配算法
4、计算优化
5、硬件实现
6、应用
立体视觉系统概述
一个完整的立体视觉系统,包含图像的采集、参数的标定、图像的校正、立体匹配、深度计算等多个部分。在各个部分具有不同的算法或者硬件设备来实现功能。
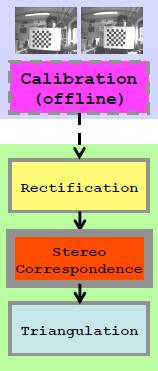
标定
系统的参数标定是一个离线的过程,主要是为了寻找:系统的固有参数值,比如相机的焦距长度、图像中心、镜头扭曲参数等;系统的外部参数(调整两个相机一致性的参数R,T)。标定的过程常用10组以上的含有一定模式(如下图所示的checkbord)的图像对来进行试验。在MATLAB和OPENCV中均有相关的相机标定程序,可以直接使用。

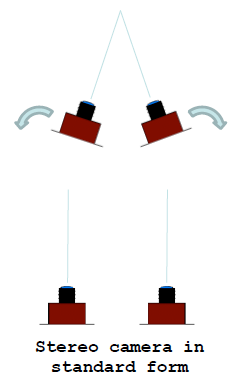
校正
由于镜头成像的原因,会使得图像在边缘形成一种扭曲(distortion)现象。而且由于两个摄像机摆放的位置不合理,使得成像也会发生变化。这些因素会使得后续的匹配步骤产生干扰,因此对这些因素的校正操作,消除透镜的扭曲效应和变换相机为标准位置成像。
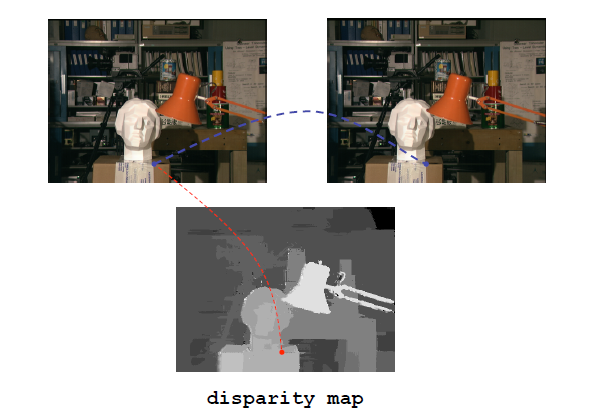
匹配
匹配操作旨在通过相关的算法找到在两幅图像中相互对应的点,根据之前的理论得出视差图(disparity map)。
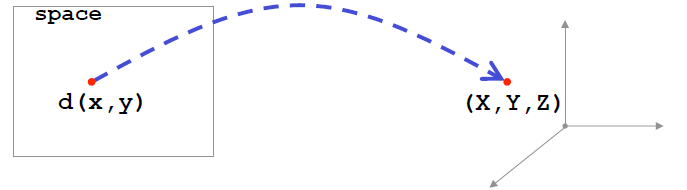
深度计算
利用之前所得的视差图计算对应点在现实世界中的坐标位置,实现2D到3D的转换。















 1969
1969











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









