







感谢原作者的分享
椭圆方程
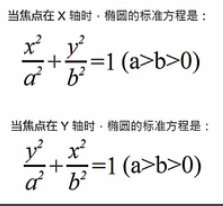
现在考虑一种特殊情况,假设二维点云拟合出的椭圆方程交点不在X轴或Y轴,即在上面的标准方程基础上发生“偏转+平移”,此时的椭圆方程形式该是什么样子?
先考虑旋转:
平面上一点P(X,Y)旋转θ角度,旋转后的坐标为(X',Y'),那么:
X' = X*cos(θ) - Y*sin(θ) , Y' = X*sin(θ) + Y*cos(θ) ;
旋转后椭圆 X^2/A^2 + Y^2/B^2 = 1 方程就变成了:[ X*cos(θ) - Y*sin(θ)]^2/A^2 +[X*sin(θ) + Y*cos(θ)]^2/B^2 = 1;
再考虑平移:X' = X+S ,Y' = Y+T ;
旋转和平移综合起来考虑,椭圆 X^2/A^2 + Y^2/B^2 = 1 方程就变成了:
[(X+S)*cos(θ) - (Y+T)*sin(θ)]^2/A^2 +[(X+S)*sin(θ) + (Y+T)*cos(θ)]^2/B^2 = 1;
c++代码实现
.h文件为:
//在这里,我实现了两种算法,一种是
//http://wenku.baidu.com/link?url=7kIrC8LoOMCtlmAH8yqkpUQfiKwWnVe4EoUJekkQSgQ1qTWfLAuEXTYvYTv7SATGIJYX4IxcTIB94-iO0SpUgztWgx661O2VEOwm_dvoSqO
//这篇文章给出的,核心也是最小二乘法,利用gauss消去法解方程组,不过他给出的代码有些小bug,所以我改了一下,也去掉了opencv的东西。
// 还有一个就是利用奇异值分解法来求超定方程的最小二乘法的思想来求出椭圆的五个参数,关于奇异值分解法可以参考
//http://blog.csdn.net/wangzhiqing3/article/details/7446444
/*************************************************************************
版本: 2014-12-31
功能说明: 对平面上的一些列点给出最小二乘的椭圆拟合,利用奇异值分解法
解得最小二乘解作为椭圆参数。
调用形式: cvFitEllipse2f(arrayx,arrayy,box);
参数说明: arrayx: arrayx[n],每个值为x轴一个点
arrayx: arrayy[n],每个值为y轴一个点
n : 点的个数
box : box[5],椭圆的五个参数,分别为center.x,center.y,2a,2b,xtheta
esp: 解精度,通常取1e-6,这个是解方程用的说
***************************************************************************/
#include"stdafx.h"
#include<cstdlib>
#include<float.h>
#include<vector>
using namespace std;
class LSEllipse
{
public:
LSEllipse(void);
~LSEllipse(void);
vector<double> getEllipseparGauss(vector<CPoint> vec_point);
void cvFitEllipse2f( int *arrayx, int *arrayy,int n,float *box );
private:
int SVD(float *a,int m,int n,float b[],float x[],float esp);
int gmiv(float a[],int m,int n,float b[],float x[],float aa[],float eps,float u[],float v[],int ka);
int ginv(float a[],int m,int n,float aa[],float eps,float u[],float v[],int ka);
int muav(float a[],int m,int n,float u[],float v[],float eps,int ka);
};
.cpp文件为:
//点A (a,b)为椭圆上的一点,θ为OA与X轴的夹角,则参数方程为
//x=acosθ
//y=bsinθ
//x^2/a^2+y^2/b^2=1为标准方程
#include"stdafx.h"
#include "LSEllipse.h"
#include <cmath>
LSEllipse::LSEllipse(void)
{
}
LSEllipse::~LSEllipse(void)
{
}
//列主元高斯消去法
//A为系数矩阵,x为解向量,若成功,返回true,否则返回false,并将x清空。
bool RGauss(const vector<vector<double> > & A, vector<double> & x)
{
x.clear();
int n = A.size();
int m = A[0].size();
x.resize(n);
//复制系数矩阵,防止修改原矩阵
vector<vector<double> > Atemp(n);
for (int i = 0; i < n; i++)
{
vector<double> temp(m);
for (int j = 0; j < m; j++)
{
temp[j] = A[i][j];
}
Atemp[i] = temp;
temp.clear();
}
for (int k = 0; k < n; k++)
{
//选主元
double max = -1;
int l = -1;
for (int i = k; i < n; i++)
{
if (abs(Atemp[i][k]) > max)
{
max = abs(Atemp[i][k]);
l = i;
}
}
if (l != k)
{
//交换系数矩阵的l行和k行
for (int i = 0; i < m; i++)
{
double temp = Atemp[l][i];
Atemp[l][i] = Atemp[k][i];
Atemp[k][i] = temp;
}
}
//消元
for (int i = k+1; i < n; i++)
{
double l = Atemp[i][k]/Atemp[k][k];
for (int j = k; j < m; j++)
{
Atemp[i][j] = Atemp[i][j] - l*Atemp[k][j];
}
}
}
//回代
x[n-1] = Atemp[n-1][m-1]/Atemp[n-1][m-2];
for (int k = n-2; k >= 0; k--)
{
double s = 0.0;
for (int j = k+1; j < n; j++)
{
s += Atemp[k][j]*x[j];
}
x[k] = (Atemp[k][m-1] - s)/Atemp[k][k];
}
return true;
}
vector<double> LSEllipse::getEllipseparGauss(vector<CPoint> vec_point)
{
vector<double> vec_result;
double x3y1 = 0,x1y3= 0,x2y2= 0,yyy4= 0, xxx3= 0,xxx2= 0,x2y1= 0,yyy3= 0,x1y2= 0 ,yyy2= 0,x1y1= 0,xxx1= 0,yyy1= 0;
int N = vec_point.size();
for (int m_i = 0;m_i < N ;++m_i )
{
double xi = vec_point[m_i].x ;
double yi = vec_point[m_i].y;
x3y1 += xi*xi*xi*yi ;
x1y3 += xi*yi*yi*yi;
x2y2 += xi*xi*yi*yi; ;
yyy4 +=yi*yi*yi*yi;
xxx3 += xi*xi*xi ;
xxx2 += xi*xi ;
x2y1 += xi*xi*yi;
x1y2 += xi*yi*yi;
yyy2 += yi*yi;
x1y1 += xi*yi;
xxx1 += xi;
yyy1 += yi;
yyy3 += yi*yi*yi;
}
double resul[5];
resul[0] = -(x3y1);
resul[1] = -(x2y2);
resul[2] = -(xxx3);
resul[3] = -(x2y1);
resul[4] = -(xxx2);
long double Bb[5],Cc[5],Dd[5],Ee[5],Aa[5];
Bb[0] = x1y3, Cc[0] = x2y1, Dd[0] = x1y2, Ee[0] = x1y1, Aa[0] = x2y2;
Bb[1] = yyy4, Cc[1] = x1y2, Dd[1] = yyy3, Ee[1] = yyy2, Aa[1] = x1y3;
Bb[2] = x1y2, Cc[2] = xxx2, Dd[2] = x1y1, Ee[2] = xxx1, Aa[2] = x2y1;
Bb[3] = yyy3, Cc[3]= x1y1, Dd[3] = yyy2, Ee[3] = yyy1, Aa[3] = x1y2;
Bb[4]= yyy2, Cc[4]= xxx1, Dd[4] = yyy1, Ee[4] = N, Aa[4]= x1y1;
vector<vector<double>>Ma(5);
vector<double>Md(5);
for(int i=0;i<5;i++)
{
Ma[i].push_back(Aa[i]);
Ma[i].push_back(Bb[i]);
Ma[i].push_back(Cc[i]);
Ma[i].push_back(Dd[i]);
Ma[i].push_back(Ee[i]);
Ma[i].push_back(resul[i]);
}
RGauss(Ma,Md);
long double A=Md[0];
long double B=Md[1];
long double C=Md[2];
long double D=Md[3];
long double E=Md[4];
double XC=(2*B*C-A*D)/(A*A-4*B);
double YC=(2*D-A*C)/(A*A-4*B);
long double fenzi=2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);
long double fenmu=(A*A-4*B)*(B-sqrt(A*A+(1-B)*(1-B))+1);
long double fenmu2=(A*A-4*B)*(B+sqrt(A*A+(1-B)*(1-B))+1);
double XA=sqrt(fabs(fenzi/fenmu));
double XB=sqrt(fabs(fenzi/fenmu2));
double Xtheta=0.5*atan(A/(1-B))*180/3.1415926;
if(B<1)
Xtheta+=90;
vec_result.push_back(XC);
vec_result.push_back(YC);
vec_result.push_back(XA);
vec_result.push_back(XB);
vec_result.push_back(Xtheta);
return vec_result;
}
void LSEllipse::cvFitEllipse2f( int *arrayx, int *arrayy,int n,float *box )
{
float cx=0,cy=0;
double rp[5], t;
float *A1=new float[n*5];
float *A2=new float[2*2];
float *A3=new float[n*3];
float *B1=new float[n],*B2=new float[2],*B3=new float[n];
const double min_eps = 1e-6;
int i;
for( i = 0; i < n; i++ )
{
cx += arrayx[i]*1.0;
cy += arrayy[i]*1.0;
}
cx /= n;
cy /= n;
for( i = 0; i < n; i++ )
{
int step=i*5;
float px,py;
px = arrayx[i]*1.0;
py = arrayy[i]*1.0;
px -= cx;
py -= cy;
B1[i] = 10000.0;
A1[step] = -px * px;
A1[step + 1] = -py * py;
A1[step + 2] = -px * py;
A1[step + 3] = px;
A1[step + 4] = py;
}
float *x1=new float[5];
//解出Ax^2+By^2+Cxy+Dx+Ey=10000的最小二乘解!
SVD(A1,n,5,B1,x1,min_eps);
A2[0]=2*x1[0],A2[1]=A2[2]=x1[2],A2[3]=2*x1[1];
B2[0]=x1[3],B2[1]=x1[4];
float *x2=new float[2];
//标准化,将一次项消掉,求出center.x和center.y;
SVD(A2,2,2,B2,x2,min_eps);
rp[0]=x2[0],rp[1]=x2[1];
for( i = 0; i < n; i++ )
{
float px,py;
px = arrayx[i]*1.0;
py = arrayy[i]*1.0;
px -= cx;
py -= cy;
B3[i] = 1.0;
int step=i*3;
A3[step] = (px - rp[0]) * (px - rp[0]);
A3[step+1] = (py - rp[1]) * (py - rp[1]);
A3[step+2] = (px - rp[0]) * (py - rp[1]);
}
//求出A(x-center.x)^2+B(y-center.y)^2+C(x-center.x)(y-center.y)的最小二乘解
SVD(A3,n,3,B3,x1,min_eps);
rp[4] = -0.5 * atan2(x1[2], x1[1] - x1[0]);
t = sin(-2.0 * rp[4]);
if( fabs(t) > fabs(x1[2])*min_eps )
t = x1[2]/t;
else
t = x1[1] - x1[0];
rp[2] = fabs(x1[0] + x1[1] - t);
if( rp[2] > min_eps )
rp[2] = sqrt(2.0 / rp[2]);
rp[3] = fabs(x1[0] + x1[1] + t);
if( rp[3] > min_eps )
rp[3] = sqrt(2.0 / rp[3]);
box[0] = (float)rp[0] + cx;
box[1]= (float)rp[1] + cy;
box[2]= (float)(rp[2]*2);
box[3] = (float)(rp[3]*2);
if( box[2] > box[3] )
{
double tmp=box[2];
box[2]=box[3];
box[3]=tmp;
}
box[4] = (float)(90 + rp[4]*180/3.1415926);
if( box[4] < -180 )
box[4] += 360;
if( box[4] > 360 )
box[4] -= 360;
delete []A1;
delete []A2;
delete []A3;
delete []B1;
delete []B2;
delete []B3;
delete []x1;
delete []x2;
}
int LSEllipse::SVD(float *a,int m,int n,float b[],float x[],float esp) //奇异值分解
{
float *aa;
float *u;
float *v;
aa=new float[n*m];
u=new float[m*m];
v=new float[n*n];
int ka;
int flag;
if(m>n)
{
ka=m+1;
}else
{
ka=n+1;
}
flag=gmiv(a,m,n,b,x,aa,esp,u,v,ka);
delete []aa;
delete []u;
delete []v;
return(flag);
}
int LSEllipse::gmiv( float a[],int m,int n,float b[],float x[],float aa[],float eps,float u[],float v[],int ka)
{
int i,j;
i=ginv(a,m,n,aa,eps,u,v,ka);
if (i<0) return(-1);
for (i=0; i<=n-1; i++)
{ x[i]=0.0;
for (j=0; j<=m-1; j++)
x[i]=x[i]+aa[i*m+j]*b[j];
}
return(1);
}
int LSEllipse::ginv(float a[],int m,int n,float aa[],float eps,float u[],float v[],int ka)
{
// int muav(float a[],int m,int n,float u[],float v[],float eps,int ka);
int i,j,k,l,t,p,q,f;
i=muav(a,m,n,u,v,eps,ka);
if (i<0) return(-1);
j=n;
if (m<n) j=m;
j=j-1;
k=0;
while ((k<=j)&&(a[k*n+k]!=0.0)) k=k+1;
k=k-1;
for (i=0; i<=n-1; i++)
for (j=0; j<=m-1; j++)
{ t=i*m+j; aa[t]=0.0;
for (l=0; l<=k; l++)
{ f=l*n+i; p=j*m+l; q=l*n+l;
aa[t]=aa[t]+v[f]*u[p]/a[q];
}
}
return(1);
}
int LSEllipse::muav(float a[],int m,int n,float u[],float v[],float eps,int ka)
{ int i,j,k,l,it,ll,kk,ix,iy,mm,nn,iz,m1,ks;
float d,dd,t,sm,sm1,em1,sk,ek,b,c,shh,fg[2],cs[2];
float *s,*e,*w;
//void ppp();
// void sss();
void ppp(float a[],float e[],float s[],float v[],int m,int n);
void sss(float fg[],float cs[]);
s=(float *) malloc(ka*sizeof(float));
e=(float *) malloc(ka*sizeof(float));
w=(float *) malloc(ka*sizeof(float));
it=60; k=n;
if (m-1<n) k=m-1;
l=m;
if (n-2<m) l=n-2;
if (l<0) l=0;
ll=k;
if (l>k) ll=l;
if (ll>=1)
{ for (kk=1; kk<=ll; kk++)
{ if (kk<=k)
{ d=0.0;
for (i=kk; i<=m; i++)
{ ix=(i-1)*n+kk-1; d=d+a[ix]*a[ix];}
s[kk-1]=(float)sqrt(d);
if (s[kk-1]!=0.0)
{ ix=(kk-1)*n+kk-1;
if (a[ix]!=0.0)
{ s[kk-1]=(float)fabs(s[kk-1]);
if (a[ix]<0.0) s[kk-1]=-s[kk-1];
}
for (i=kk; i<=m; i++)
{ iy=(i-1)*n+kk-1;
a[iy]=a[iy]/s[kk-1];
}
a[ix]=1.0f+a[ix];
}
s[kk-1]=-s[kk-1];
}
if (n>=kk+1)
{ for (j=kk+1; j<=n; j++)
{ if ((kk<=k)&&(s[kk-1]!=0.0))
{ d=0.0;
for (i=kk; i<=m; i++)
{ ix=(i-1)*n+kk-1;
iy=(i-1)*n+j-1;
d=d+a[ix]*a[iy];
}
d=-d/a[(kk-1)*n+kk-1];
for (i=kk; i<=m; i++)
{ ix=(i-1)*n+j-1;
iy=(i-1)*n+kk-1;
a[ix]=a[ix]+d*a[iy];
}
}
e[j-1]=a[(kk-1)*n+j-1];
}
}
if (kk<=k)
{ for (i=kk; i<=m; i++)
{ ix=(i-1)*m+kk-1; iy=(i-1)*n+kk-1;
u[ix]=a[iy];
}
}
if (kk<=l)
{ d=0.0;
for (i=kk+1; i<=n; i++)
d=d+e[i-1]*e[i-1];
e[kk-1]=(float)sqrt(d);
if (e[kk-1]!=0.0)
{ if (e[kk]!=0.0)
{ e[kk-1]=(float)fabs(e[kk-1]);
if (e[kk]<0.0) e[kk-1]=-e[kk-1];
}
for (i=kk+1; i<=n; i++)
e[i-1]=e[i-1]/e[kk-1];
e[kk]=1.0f+e[kk];
}
e[kk-1]=-e[kk-1];
if ((kk+1<=m)&&(e[kk-1]!=0.0))
{ for (i=kk+1; i<=m; i++) w[i-1]=0.0;
for (j=kk+1; j<=n; j++)
for (i=kk+1; i<=m; i++)
w[i-1]=w[i-1]+e[j-1]*a[(i-1)*n+j-1];
for (j=kk+1; j<=n; j++)
for (i=kk+1; i<=m; i++)
{ ix=(i-1)*n+j-1;
a[ix]=a[ix]-w[i-1]*e[j-1]/e[kk];
}
}
for (i=kk+1; i<=n; i++)
v[(i-1)*n+kk-1]=e[i-1];
}
}
}
mm=n;
if (m+1<n) mm=m+1;
if (k<n) s[k]=a[k*n+k];
if (m<mm) s[mm-1]=0.0;
if (l+1<mm) e[l]=a[l*n+mm-1];
e[mm-1]=0.0;
nn=m;
if (m>n) nn=n;
if (nn>=k+1)
{ for (j=k+1; j<=nn; j++)
{ for (i=1; i<=m; i++)
u[(i-1)*m+j-1]=0.0;
u[(j-1)*m+j-1]=1.0;
}
}
if (k>=1)
{ for (ll=1; ll<=k; ll++)
{ kk=k-ll+1; iz=(kk-1)*m+kk-1;
if (s[kk-1]!=0.0)
{ if (nn>=kk+1)
for (j=kk+1; j<=nn; j++)
{ d=0.0;
for (i=kk; i<=m; i++)
{ ix=(i-1)*m+kk-1;
iy=(i-1)*m+j-1;
d=d+u[ix]*u[iy]/u[iz];
}
d=-d;
for (i=kk; i<=m; i++)
{ ix=(i-1)*m+j-1;
iy=(i-1)*m+kk-1;
u[ix]=u[ix]+d*u[iy];
}
}
for (i=kk; i<=m; i++)
{ ix=(i-1)*m+kk-1; u[ix]=-u[ix];}
u[iz]=1.0f+u[iz];
if (kk-1>=1)
for (i=1; i<=kk-1; i++)
u[(i-1)*m+kk-1]=0.0;
}
else
{ for (i=1; i<=m; i++)
u[(i-1)*m+kk-1]=0.0;
u[(kk-1)*m+kk-1]=1.0;
}
}
}
for (ll=1; ll<=n; ll++)
{ kk=n-ll+1; iz=kk*n+kk-1;
if ((kk<=l)&&(e[kk-1]!=0.0))
{ for (j=kk+1; j<=n; j++)
{ d=0.0;
for (i=kk+1; i<=n; i++)
{ ix=(i-1)*n+kk-1; iy=(i-1)*n+j-1;
d=d+v[ix]*v[iy]/v[iz];
}
d=-d;
for (i=kk+1; i<=n; i++)
{ ix=(i-1)*n+j-1; iy=(i-1)*n+kk-1;
v[ix]=v[ix]+d*v[iy];
}
}
}
for (i=1; i<=n; i++)
v[(i-1)*n+kk-1]=0.0;
v[iz-n]=1.0;
}
for (i=1; i<=m; i++)
for (j=1; j<=n; j++)
a[(i-1)*n+j-1]=0.0;
m1=mm; it=60;
while (1==1)
{ if (mm==0)
{ ppp(a,e,s,v,m,n);
free(s); free(e); free(w); return(1);
}
if (it==0)
{ ppp(a,e,s,v,m,n);
free(s); free(e); free(w); return(-1);
}
kk=mm-1;
while ((kk!=0)&&(fabs(e[kk-1])!=0.0))
{ d=(float)(fabs(s[kk-1])+fabs(s[kk]));
dd=(float)fabs(e[kk-1]);
if (dd>eps*d) kk=kk-1;
else e[kk-1]=0.0;
}
if (kk==mm-1)
{ kk=kk+1;
if (s[kk-1]<0.0)
{ s[kk-1]=-s[kk-1];
for (i=1; i<=n; i++)
{ ix=(i-1)*n+kk-1; v[ix]=-v[ix];}
}
while ((kk!=m1)&&(s[kk-1]<s[kk]))
{ d=s[kk-1]; s[kk-1]=s[kk]; s[kk]=d;
if (kk<n)
for (i=1; i<=n; i++)
{ ix=(i-1)*n+kk-1; iy=(i-1)*n+kk;
d=v[ix]; v[ix]=v[iy]; v[iy]=d;
}
if (kk<m)
for (i=1; i<=m; i++)
{ ix=(i-1)*m+kk-1; iy=(i-1)*m+kk;
d=u[ix]; u[ix]=u[iy]; u[iy]=d;
}
kk=kk+1;
}
it=60;
mm=mm-1;
}
else
{ ks=mm;
while ((ks>kk)&&(fabs(s[ks-1])!=0.0))
{ d=0.0;
if (ks!=mm) d=d+(float)fabs(e[ks-1]);
if (ks!=kk+1) d=d+(float)fabs(e[ks-2]);
dd=(float)fabs(s[ks-1]);
if (dd>eps*d) ks=ks-1;
else s[ks-1]=0.0;
}
if (ks==kk)
{ kk=kk+1;
d=(float)fabs(s[mm-1]);
t=(float)fabs(s[mm-2]);
if (t>d) d=t;
t=(float)fabs(e[mm-2]);
if (t>d) d=t;
t=(float)fabs(s[kk-1]);
if (t>d) d=t;
t=(float)fabs(e[kk-1]);
if (t>d) d=t;
sm=s[mm-1]/d; sm1=s[mm-2]/d;
em1=e[mm-2]/d;
sk=s[kk-1]/d; ek=e[kk-1]/d;
b=((sm1+sm)*(sm1-sm)+em1*em1)/2.0f;
c=sm*em1; c=c*c; shh=0.0;
if ((b!=0.0)||(c!=0.0))
{ shh=(float)sqrt(b*b+c);
if (b<0.0) shh=-shh;
shh=c/(b+shh);
}
fg[0]=(sk+sm)*(sk-sm)-shh;
fg[1]=sk*ek;
for (i=kk; i<=mm-1; i++)
{ sss(fg,cs);
if (i!=kk) e[i-2]=fg[0];
fg[0]=cs[0]*s[i-1]+cs[1]*e[i-1];
e[i-1]=cs[0]*e[i-1]-cs[1]*s[i-1];
fg[1]=cs[1]*s[i];
s[i]=cs[0]*s[i];
if ((cs[0]!=1.0)||(cs[1]!=0.0))
for (j=1; j<=n; j++)
{ ix=(j-1)*n+i-1;
iy=(j-1)*n+i;
d=cs[0]*v[ix]+cs[1]*v[iy];
v[iy]=-cs[1]*v[ix]+cs[0]*v[iy];
v[ix]=d;
}
sss(fg,cs);
s[i-1]=fg[0];
fg[0]=cs[0]*e[i-1]+cs[1]*s[i];
s[i]=-cs[1]*e[i-1]+cs[0]*s[i];
fg[1]=cs[1]*e[i];
e[i]=cs[0]*e[i];
if (i<m)
if ((cs[0]!=1.0)||(cs[1]!=0.0))
for (j=1; j<=m; j++)
{ ix=(j-1)*m+i-1;
iy=(j-1)*m+i;
d=cs[0]*u[ix]+cs[1]*u[iy];
u[iy]=-cs[1]*u[ix]+cs[0]*u[iy];
u[ix]=d;
}
}
e[mm-2]=fg[0];
it=it-1;
}
else
{ if (ks==mm)
{ kk=kk+1;
fg[1]=e[mm-2]; e[mm-2]=0.0;
for (ll=kk; ll<=mm-1; ll++)
{ i=mm+kk-ll-1;
fg[0]=s[i-1];
sss(fg,cs);
s[i-1]=fg[0];
if (i!=kk)
{ fg[1]=-cs[1]*e[i-2];
e[i-2]=cs[0]*e[i-2];
}
if ((cs[0]!=1.0)||(cs[1]!=0.0))
for (j=1; j<=n; j++)
{ ix=(j-1)*n+i-1;
iy=(j-1)*n+mm-1;
d=cs[0]*v[ix]+cs[1]*v[iy];
v[iy]=-cs[1]*v[ix]+cs[0]*v[iy];
v[ix]=d;
}
}
}
else
{ kk=ks+1;
fg[1]=e[kk-2];
e[kk-2]=0.0;
for (i=kk; i<=mm; i++)
{ fg[0]=s[i-1];
sss(fg,cs);
s[i-1]=fg[0];
fg[1]=-cs[1]*e[i-1];
e[i-1]=cs[0]*e[i-1];
if ((cs[0]!=1.0)||(cs[1]!=0.0))
for (j=1; j<=m; j++)
{ ix=(j-1)*m+i-1;
iy=(j-1)*m+kk-2;
d=cs[0]*u[ix]+cs[1]*u[iy];
u[iy]=-cs[1]*u[ix]+cs[0]*u[iy];
u[ix]=d;
}
}
}
}
}
}
free(s);free(e);free(w);
return(1);
}
void ppp(float a[],float e[],float s[],float v[],int m,int n)
{ int i,j,p,q;
float d;
if (m>=n) i=n;
else i=m;
for (j=1; j<=i-1; j++)
{ a[(j-1)*n+j-1]=s[j-1];
a[(j-1)*n+j]=e[j-1];
}
a[(i-1)*n+i-1]=s[i-1];
if (m<n) a[(i-1)*n+i]=e[i-1];
for (i=1; i<=n-1; i++)
for (j=i+1; j<=n; j++)
{ p=(i-1)*n+j-1; q=(j-1)*n+i-1;
d=v[p]; v[p]=v[q]; v[q]=d;
}
return;
}
void sss(float fg[],float cs[])
{ float r,d;
if ((fabs(fg[0])+fabs(fg[1]))==0.0)
{ cs[0]=1.0; cs[1]=0.0; d=0.0;}
else
{ d=(float)sqrt(fg[0]*fg[0]+fg[1]*fg[1]);
if (fabs(fg[0])>fabs(fg[1]))
{ d=(float)fabs(d);
if (fg[0]<0.0) d=-d;
}
if (fabs(fg[1])>=fabs(fg[0]))
{ d=(float)fabs(d);
if (fg[1]<0.0) d=-d;
}
cs[0]=fg[0]/d; cs[1]=fg[1]/d;
}
r=1.0;
if (fabs(fg[0])>fabs(fg[1])) r=cs[1];
else
if (cs[0]!=0.0) r=1.0f/cs[0];
fg[0]=d; fg[1]=r;
return;
}
//传入样本点,返回椭圆的5个参数
vector<double> getEllipsepar(vector<CvPoint> vec_point)
{
vector<double> vec_result;
double x3y1 = 0,x1y3= 0,x2y2= 0,yyy4= 0, xxx3= 0,xxx2= 0,x2y1= 0,yyy3= 0,x1y2= 0 ,yyy2= 0,x1y1= 0,xxx1= 0,yyy1= 0;
int N = vec_point.size();
cout << N << endl;
for (int m_i = 0;m_i < N ;++m_i )
{
double xi = vec_point[m_i].x ;
double yi = vec_point[m_i].y;
x3y1 += xi*xi*xi*yi ;
x1y3 += xi*yi*yi*yi;
x2y2 += xi*xi*yi*yi; ;
yyy4 +=yi*yi*yi*yi;
xxx3 += xi*xi*xi ;
xxx2 += xi*xi ;
x2y1 += xi*xi*yi;
x1y2 += xi*yi*yi;
yyy2 += yi*yi;
x1y1 += xi*yi;
xxx1 += xi;
yyy1 += yi;
yyy3 += yi*yi*yi;
}
long double resul1 = -(x3y1);
long double resul2 = -(x2y2);
long double resul3 = -(xxx3);
long double resul4 = -(x2y1);
long double resul5 = -(xxx2);
long double B1 = x1y3, C1 = x2y1, D1 = x1y2, E1 = x1y1, A1 = x2y2;
long double B2 = yyy4, C2 = x1y2, D2 = yyy3, E2 = yyy2, A2 = x1y3;
long double B3 = x1y2, C3 = xxx2, D3 = x1y1, E3 = xxx1, A3 = x2y1;
long double B4 = yyy3, C4 = x1y1, D4 = yyy2, E4 = yyy1, A4 = x1y2;
long double B5 = yyy2, C5 = xxx1, D5 = yyy1, E5 = N, A5 = x1y1;
//
CvMat* Ma = cvCreateMat(5,5,CV_64FC1);
CvMat* Md = cvCreateMat(5,1,CV_64FC1);
CvMat* Mb = cvCreateMat(5,1,CV_64FC1);
//
cvmSet(Mb,0,0,resul1);
cvmSet(Mb,1,0,resul2);
cvmSet(Mb,2,0,resul3);
cvmSet(Mb,3,0,resul4);
cvmSet(Mb,4,0,resul5);
cvmSet(Ma,0,0,A1);
cvmSet(Ma,0,1,B1);
cvmSet(Ma,0,2,C1);
cvmSet(Ma,0,3,D1);
cvmSet(Ma,0,4,E1);
cvmSet(Ma,1,0,A2);
cvmSet(Ma,1,1,B2);
cvmSet(Ma,1,2,C2);
cvmSet(Ma,1,3,D2);
cvmSet(Ma,1,4,E2);
cvmSet(Ma,2,0,A3);
cvmSet(Ma,2,1,B3);
cvmSet(Ma,2,2,C3);
cvmSet(Ma,2,3,D3);
cvmSet(Ma,2,4,E3);
cvmSet(Ma,3,0,A4);
cvmSet(Ma,3,1,B4);
cvmSet(Ma,3,2,C4);
cvmSet(Ma,3,3,D4);
cvmSet(Ma,3,4,E4);
cvmSet(Ma,4,0,A5);
cvmSet(Ma,4,1,B5);
cvmSet(Ma,4,2,C5);
cvmSet(Ma,4,3,D5);
cvmSet(Ma,4,4,E5);
cvSolve(Ma, Mb, Md);
long double A = cvmGet(Md,0,0);
long double B = cvmGet(Md,1,0);
long double C = cvmGet(Md,2,0);
long double D = cvmGet(Md,3,0);
long double E = cvmGet(Md,4,0);
double XC = (2*B*C - A*D) /(A*A-4*B);
double YC =(2*D-A*D)/(A*A-4*B);
long double fenzi = 2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);
long double fenmu =(A*A-4*B) * (B- sqrt(A*A+ (1-B) * (1-B) ) +1);
long double femmu2 =(A*A-4*B) * (B+ sqrt(A*A+ (1-B) * (1-B) ) +1);
double XA =sqrt(fabs(fenzi/fenmu));
double XB =sqrt(fabs(fenzi/femmu2));
double Xtheta =atan(sqrt((XA*XA-XB*XB*B)/(XA*XA*B-XB*XB))+0.0001)*180/3.1415926;
vec_result.push_back(XC);
vec_result.push_back(YC);
vec_result.push_back(XA);
vec_result.push_back(XB);
vec_result.push_back(Xtheta);
return vec_result;
}














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









