






“在代码的海洋里,有无尽的知识等待你去发现。我就是那艘领航的船,带你乘风破浪,驶向代码的彼岸。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
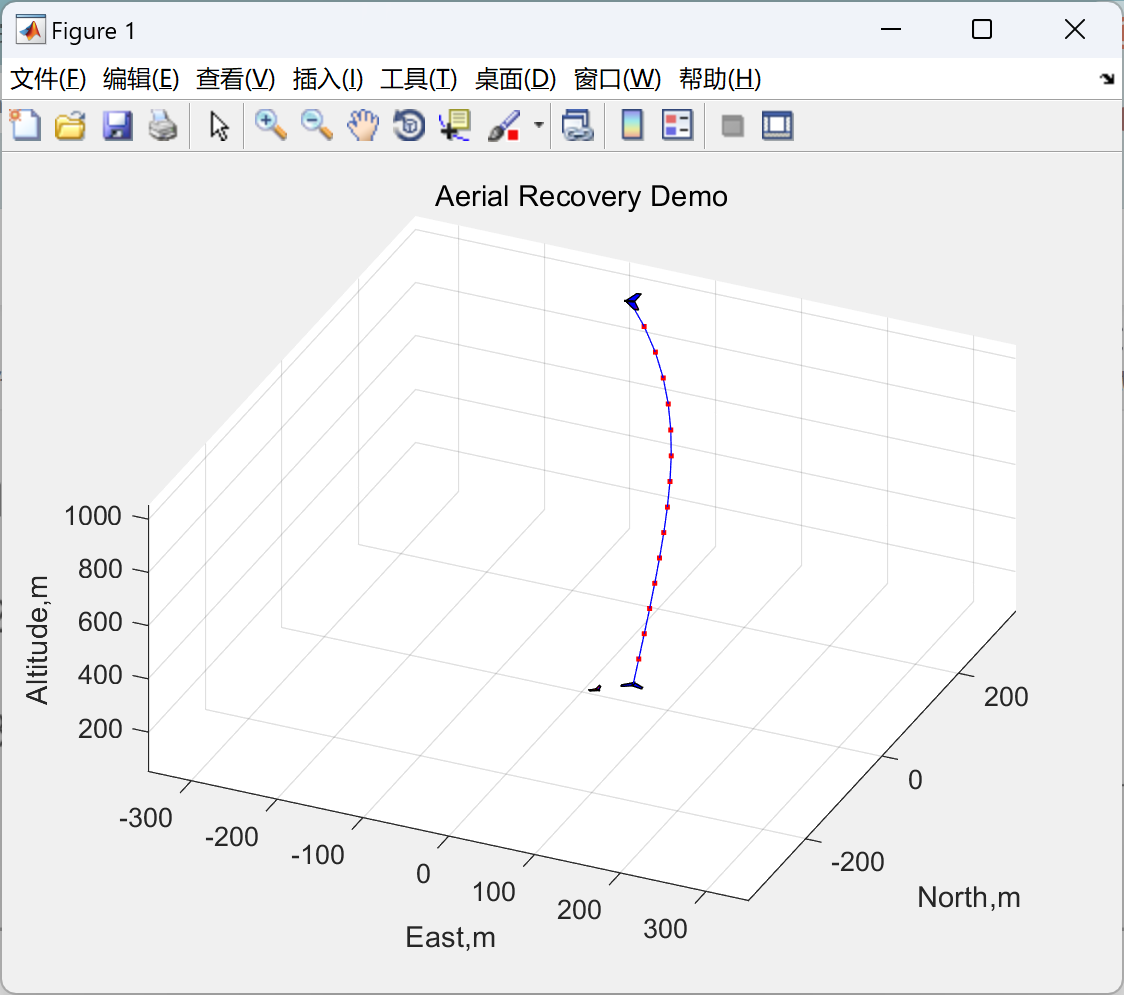
“空中回收概念演示”旨在展示一种创新且具有重要意义的技术设想。 首先,对空中回收的概念进行详细阐述,解释其核心原理和预期目标。这可能涉及在飞行状态下对特定物体、设备或人员的回收操作。 描述演示所设定的场景和条件,包括飞行器的类型、飞行环境、回收对象的特征等。 接着介绍为演示所采用的技术手段和设备,如特殊的捕获装置、导航与控制系统、通信设备等。 重点分析演示过程中所展示的关键步骤和操作流程,以及如何解决可能出现的技术难题和风险。 通过对演示结果的评估,阐述该概念的可行性、优势和潜在的应用领域。 最后,讨论空中回收概念演示对未来相关技术发展的启示和推动作用,以及可能需要进一步改进和完善的方向。 综上所述,空中回收概念演示为这一前沿技术的研究和实际应用提供了有价值的参考和探索。
📚2 运行结果

部分代码:
clear all
clc
P.ts = 0.2;
%=========================================================================
% physical parameters
P.g = 9.8; % (m/s) gravity constant
P.rho = 1.268200; % air density
P.sound_speed = 340; % sound speed (m/s)
%=========================================================================
% wind parameters (currently not working with wind)
P.wind.n = 0; % North component of wind
P.wind.e = 0; % East component of wind
%=========================================================================
% mothership configuration
P.mothership.dir = -1; % -1=conter-clockwise; 1=clockwise
V = 50; % mothership airspeed in m/s
R = 300; % mothership radius in m
c = [0; 0]; % center of mothership orbit in m
h = 1000; % altitude of mothership in m
P.mothership.n = c(1) + R; % initial North position of mothership
P.mothership.e = c(2); % initial East position of mothership
P.mothership.d = -h; % initial Down position of mothership
P.mothership.V = V; % initial airspeed of mothership
P.mothership.chi = -pi/2; % initial heading set up for counterclockwise orbit
P.mothership.phi = 0; % initial roll angle
P.mothership.gam = 0; % intial flight path angle
P.mothership.phibar = 45*(pi/180); % (rad) roll angle constraint
P.mothership.phidotbar = 100*(pi/180); % (rad/sec) roll rate constraint
P.mothership.R = V^2/P.g/tan(P.mothership.phibar)+5; % (m) min turn radius
P.mothership.gambar = 20*(pi/180); % (rad) flight path constraint
P.mothership.gamdotbar = 60*(pi/180); % (rad/sec) flight path rate constraint
P.mothership.T_guidance = P.ts; % sample rate for mothership guidance loop
P.mothership.k_roll = 10; % roll attitude hold proportional gain
P.mothership.k_h = 1; % proportional gain for altitude
P.mothership.k_hdot = 1; % derivative gain for altitude
P.mothership.k_orbit = 0.01; % proportional gain for tracking oribits
P.mothership.radius = R;
P.mothership.size = 0.2; % size for display
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王波,孟志鹏,陈小庆,等.从无人机蜂群发展趋势看反无人机蜂群策略[J].国防科技,2023,44(03):68-73.DOI:10.13943/j.issn1671-4547.2023.03.09.
[2]李玮超. 基于视觉的无人机对地目标检测与地理定位研究[D].中南大学,2023.DOI:10.27661/d.cnki.gzhnu.2023.001748.
🌈4 Matlab代码实现
















 264
264











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









