






采用 Arduino Mega2560单片机作为主控单元,采用四轮式移动(麦克纳姆轮),四轮均可驱动,可以通过蓝牙控制小车前进、后退、原地转向等操作。
一 ,总体结构
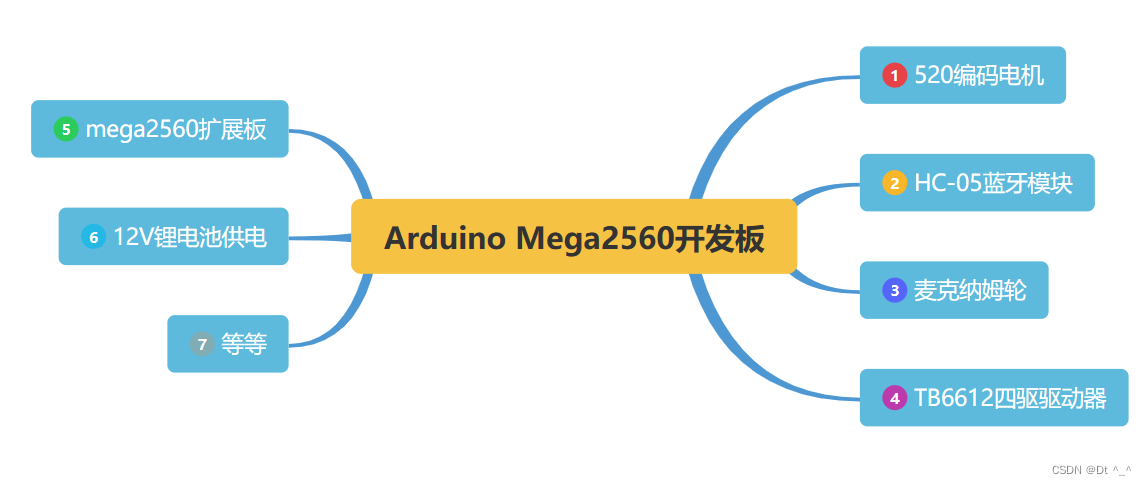
二 ,硬件选取
1,编码电机(高精度编码器12v大扭矩的520电机)

2 ,蓝牙模块选择(HC-05或HC-06)

3 ,麦克纳姆轮(推荐和小车底盘一块购买)

4 ,电机驱动选择(可以选择TB6612四驱驱动器)

5 ,mega2560扩展板

6 ,最后选择一个供电设备,可以用充电宝或者锂电池
三 ,代码部分
/************************************************************/
/********硬件:Arduino mega2560 + TB6612电机驱动一个********/
/************************************************************/
#include<SoftwareSerial.h> //蓝牙
int L1_IN1 = 29;int L1_IN2 = 53;int L1_ENA = 8;//左前轮
int R1_IN1 = 26;int R1_IN2 = 50;int R1_ENA = 11;//右前轮
int L2_IN1 = 28;int L2_IN2 = 52;int L2_ENA = 9;//左后轮
int R2_IN1 = 27;int R2_IN2 = 51;int R2_ENA = 10;//右后轮
// Pin14为RX,接HC05的TXD
// Pin15为TX,接HC05的RXD
char val;
void setup() {
// put your setup code here, to run once:
pinMode(L1_IN1, OUTPUT);pinMode(L1_IN2, OUTPUT);pinMode(L1_ENA, OUTPUT);
pinMode(R1_IN1, OUTPUT);pinMode(R1_IN2, OUTPUT);pinMode(R1_ENA, OUTPUT);
pinMode(L2_IN1, OUTPUT);pinMode(L2_IN2, OUTPUT);pinMode(L2_ENA, OUTPUT);
pinMode(R2_IN1, OUTPUT);pinMode(R2_IN2, OUTPUT);pinMode(R2_ENA, OUTPUT);
Serial.begin(9600);
Serial.println("bluetooth is ready!");
Serial3.begin(9600);//蓝牙传输速率
}
void L1_forward(int sp)//左前轮前进
{
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,HIGH);
analogWrite(L1_ENA,sp);
}
void R1_forward(int sp)//右前轮前进
{
digitalWrite(R1_IN1,HIGH);
digitalWrite(R1_IN2,LOW);
analogWrite(R1_ENA,sp);
}
void L2_forward(int sp)//左后轮前进
{
digitalWrite(L2_IN1,HIGH);
digitalWrite(L2_IN2,LOW);
analogWrite(L2_ENA,sp);
}
void R2_forward(int sp)//右后轮前进
{
digitalWrite(R2_IN1,HIGH);
digitalWrite(R2_IN2,LOW);
analogWrite(R2_ENA,sp);
}
void allstop()
{
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,LOW);
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,LOW);
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,LOW);
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,LOW);
}
void L1_backward(int sp)//左前轮后退
{
digitalWrite(L1_IN1,HIGH);
digitalWrite(L1_IN2,LOW);
analogWrite(L1_ENA,sp);
}
void R1_backward(int sp)//右前轮后退
{
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,HIGH);
analogWrite(R1_ENA,sp);
}
void L2_backward(int sp)//左后轮后退
{
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,HIGH);
analogWrite(L2_ENA,sp);
}
void R2_backward(int sp)//右后轮后退
{
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,HIGH);
analogWrite(R2_ENA,sp);
}
/*
void loop() {//使用串口收发指令
while(Serial.available()>0)
{
val = Serial.read();//读取串口缓冲区的数据
Serial.print(val);
switch(val)
{
case 'w':
/*前进
L1_forward(100);
R1_forward(100);
L2_forward(100);
R2_forward(100);
delay(1500);
allstop();
delay(1500);
break;
case's':
/*后退
L1_backward(100);
R1_backward(100);
L2_backward(100);
R2_backward(100);
delay(1500);
allstop();
delay(1500);
break;
case'd':
/*右边平移
L1_forward(150);
R1_backward(150);
L2_backward(150);
R2_forward(150);
delay(1500);
allstop();
delay(1500);
break;
case'a':
/*左边平移
L1_backward(150);
R1_forward(150);
L2_forward(150);
R2_backward(150);
delay(1500);
allstop();
delay(1500);
break;
case'c_w':
/*顺时针原地旋转
L1_forward(200);
R1_backward(200);
L2_forward(200);
R2_backward(200);
delay(1500);
allstop();
delay(1500);
break;
case'ccw':
/*逆时针原地旋转
L1_backward(200);
R1_forward(200);
L2_backward(200);
R2_forward(200);
delay(1500);
allstop();
delay(1500);
break;
case'a_w':
/*斜向左上方
R1_forward(150);
L2_forward(150);
delay(1500);
allstop();
delay(1500);
break;
case'd_w':
/*斜向右上方
L1_forward(150);
R2_forward(150);
delay(1500);
allstop();
delay(1500);
break;
case'd_s':
/*斜向右下方
R1_backward(150);
L2_backward(150);
delay(1500);
allstop();
delay(1500);
break;
case'a_s':
/*斜向左下方
L1_backward(150);
R2_backward(150);
delay(1500);
allstop();
delay(1500);
break;
default:
/*停止
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,LOW);
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,LOW);
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,LOW);
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,LOW);
break;
}
}
}
*/
/*使用蓝牙收发指令*/
void loop() {
while(Serial3.available()>0)
{
val = Serial3.read();//读取串口缓冲区的数据
Serial3.println(val);
switch(val)
{
case 'w':
/*前进*/
L1_forward(100);
R1_forward(100);
L2_forward(100);
R2_forward(100);
delay(1500);
allstop();
delay(1500);
break;
case's':
/*后退*/
L1_backward(100);
R1_backward(100);
L2_backward(100);
R2_backward(100);
delay(1500);
allstop();
delay(1500);
break;
case'd':
/*右边平移*/
L1_forward(150);
R1_backward(150);
L2_backward(150);
R2_forward(150);
delay(1500);
allstop();
delay(1500);
break;
case'a':
/*左边平移*/
L1_backward(150);
R1_forward(150);
L2_forward(150);
R2_backward(150);
delay(1500);
allstop();
delay(1500);
break;
case'c_w':
/*顺时针原地旋转*/
L1_forward(200);
R1_backward(200);
L2_forward(200);
R2_backward(200);
delay(1500);
allstop();
delay(1500);
break;
case'ccw':
/*逆时针原地旋转*/
L1_backward(200);
R1_forward(200);
L2_backward(200);
R2_forward(200);
delay(1500);
allstop();
delay(1500);
break;
case'a_w':
/*斜向左上方*/
R1_forward(150);
L2_forward(150);
delay(1500);
allstop();
delay(1500);
break;
case'd_w':
/*斜向右上方*/
L1_forward(150);
R2_forward(150);
delay(1500);
allstop();
delay(1500);
break;
case'd_s':
/*斜向右下方*/
R1_backward(150);
L2_backward(150);
delay(1500);
allstop();
delay(1500);
break;
case'a_s':
/*斜向左下方*/
L1_backward(150);
R2_backward(150);
delay(1500);
allstop();
delay(1500);
break;
default:
/*停止*/
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,LOW);
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,LOW);
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,LOW);
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,LOW);
break;
}
}
}
可以通过电脑串口发送指令控制小车的运动,或者是通过蓝牙串口。
四 ,蓝牙串口
安卓手机直接在应用商城搜索蓝牙串口进行下载
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











