






毕设帮助、开题指导、技术解答(有偿)见文末。
目录
摘要
本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程。此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路。本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能。在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。
关键词:stm32;红外探测;超声波避障;PWM;电机控制
一、硬件方案
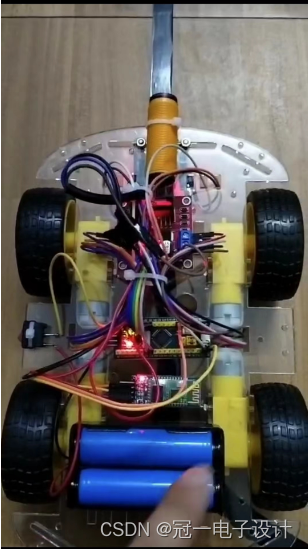
硬件构成:STM32单片机最小系统板+L298N电机驱动模块+智能小车底盘(带电机)+E18-D80NK红外避障传感器+TCRT5000循迹传感器+HC06蓝牙模块+电池
二、设计功能
1、STM32单片机实现循迹+避障+蓝牙遥控智能小车。
2、智能小车不仅能后实现循迹黑线的功能,并且可通过手机蓝牙APP远程遥控智能小车执行前进、后退、左转、右转、停止等动作,同时在蓝牙遥控时,具有避障功能,在前方有物体遮挡时,可以自动避障开障碍物,然后继续行驶。
三、实物图


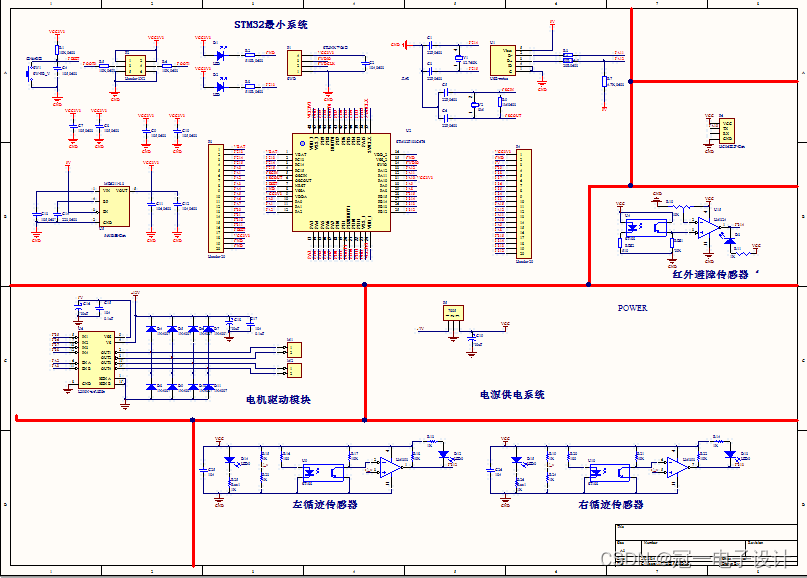
四、原理图
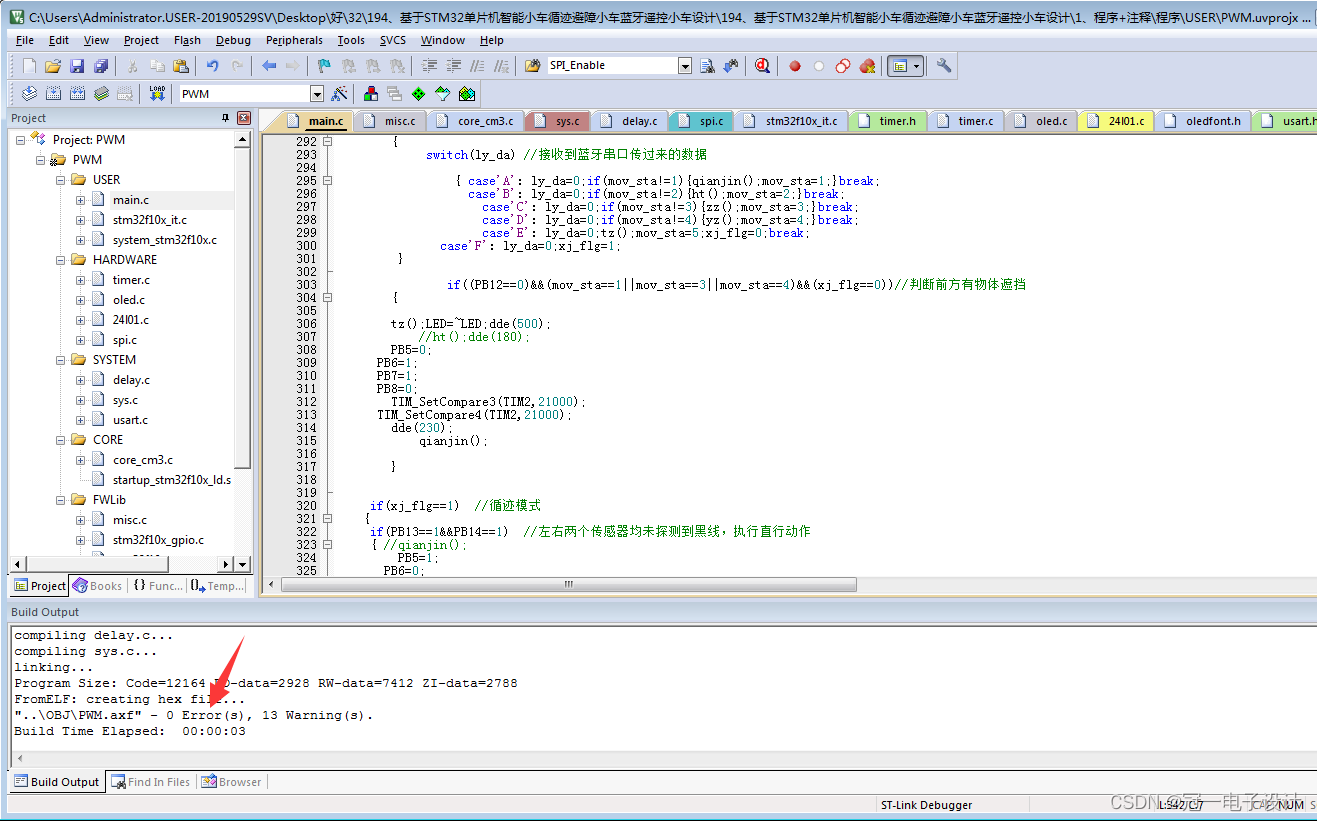
五、程序源码
六、资料包括
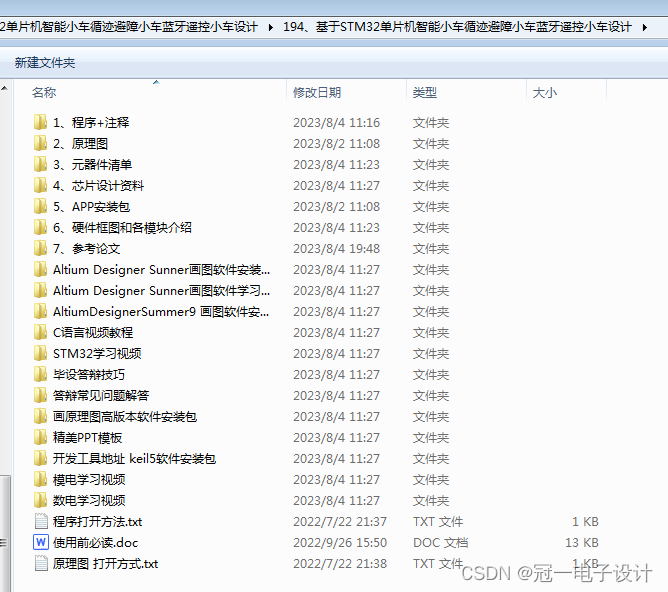
需要完整的资料可以点击下面的名片,找我要资源压缩包的百度网盘下载地址及提取码。
















 2099
2099











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











