






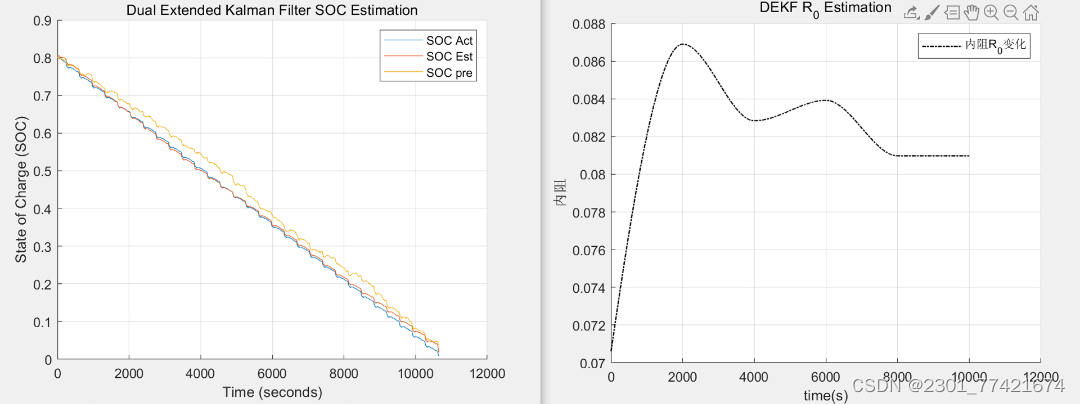
双扩展卡尔曼滤波DEKF算法实现了SOC与SOH联合估计。
可改用其他滤波算法,如UKF,PF等。
ID:78100644547054165
双扩展卡尔曼滤波DEKF算法实现了SOC与SOH联合估计。
可改用其他滤波算法,如UKF,PF等。
ID:78100644547054165
 4747
338
425
4747
338
425











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























