







1.输出比较简介
输出比较的电路如图所示

cnt是时基单元里的计数器,ccr是捕获/比较寄存器,电路会比较cnt和ccr的值,cnt计数自增,ccr是给定的一个值,当cnt大于ccr、小于ccr或等于ccr时,输出就会对应置1、置0
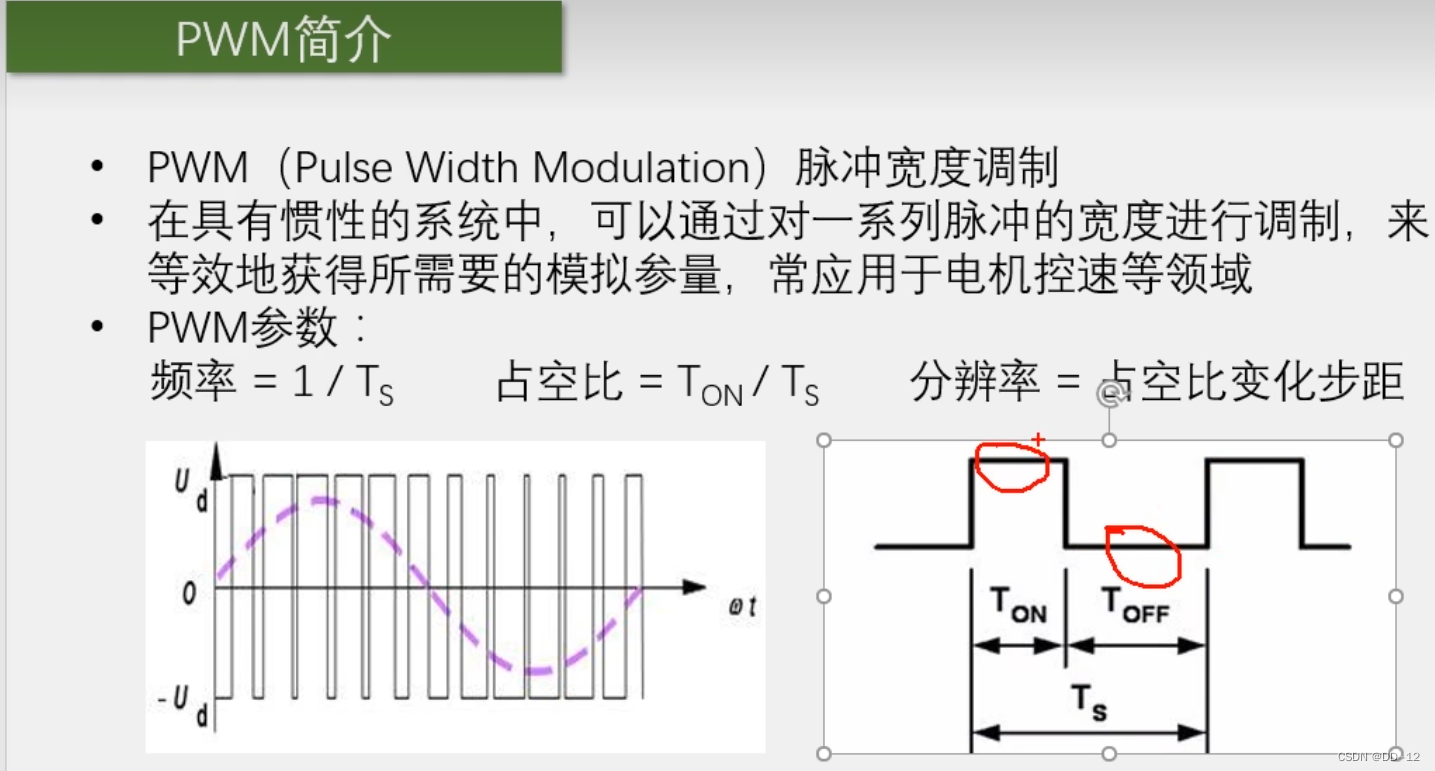
2.PWM简介
3.输出比较通道(通用计时器)
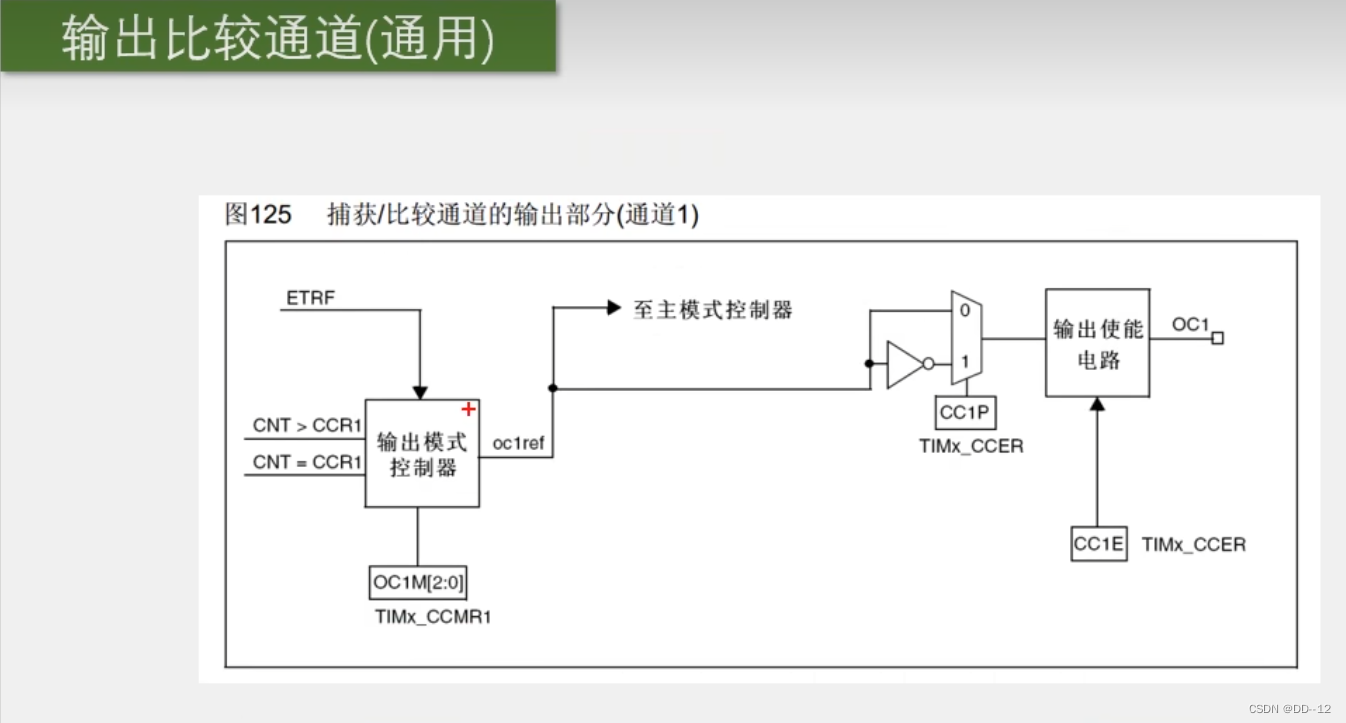
输出比较模式:

PWM相
1.输出比较简介
输出比较的电路如图所示
cnt是时基单元里的计数器,ccr是捕获/比较寄存器,电路会比较cnt和ccr的值,cnt计数自增,ccr是给定的一个值,当cnt大于ccr、小于ccr或等于ccr时,输出就会对应置1、置0
2.PWM简介
3.输出比较通道(通用计时器)
输出比较模式:
PWM相
 7319
845
1132
1万+
7319
845
1132
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















