







1.输入捕获简介
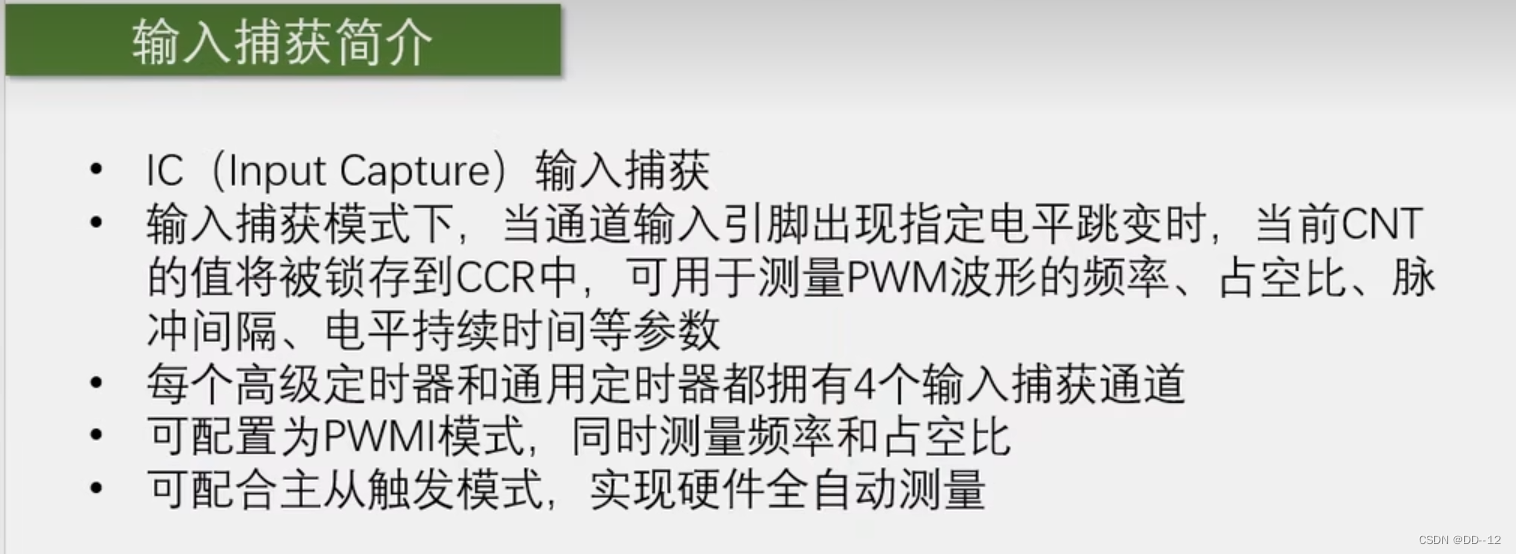
频率测量方式:

测频法适合高频信号,而测周法适合低频信号
2.主从触发模式
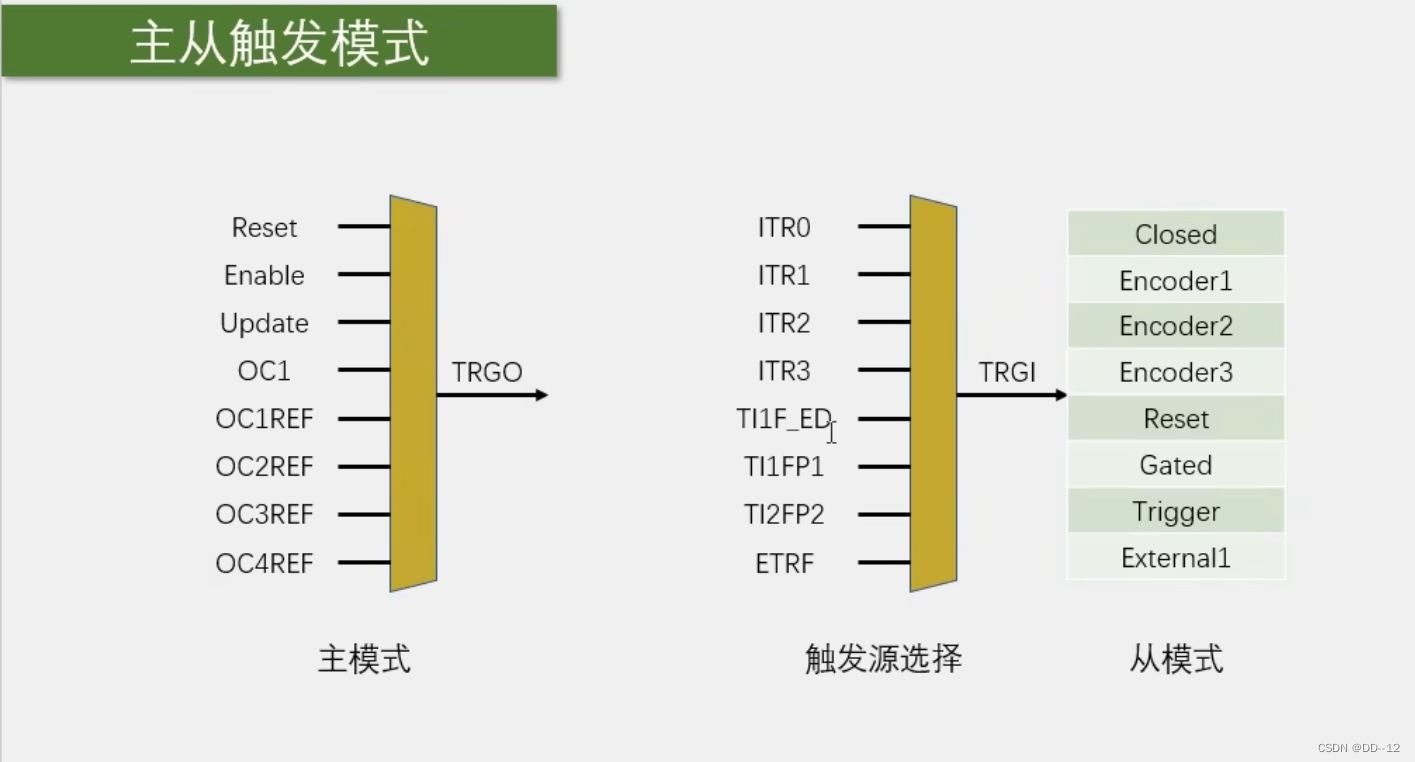
主模式可以将定时器内部的信号映射到TRGO引脚用于触发别的外设
从模式是接收其他外设或者自身外设的一些信号用于控制自身定时器的运行
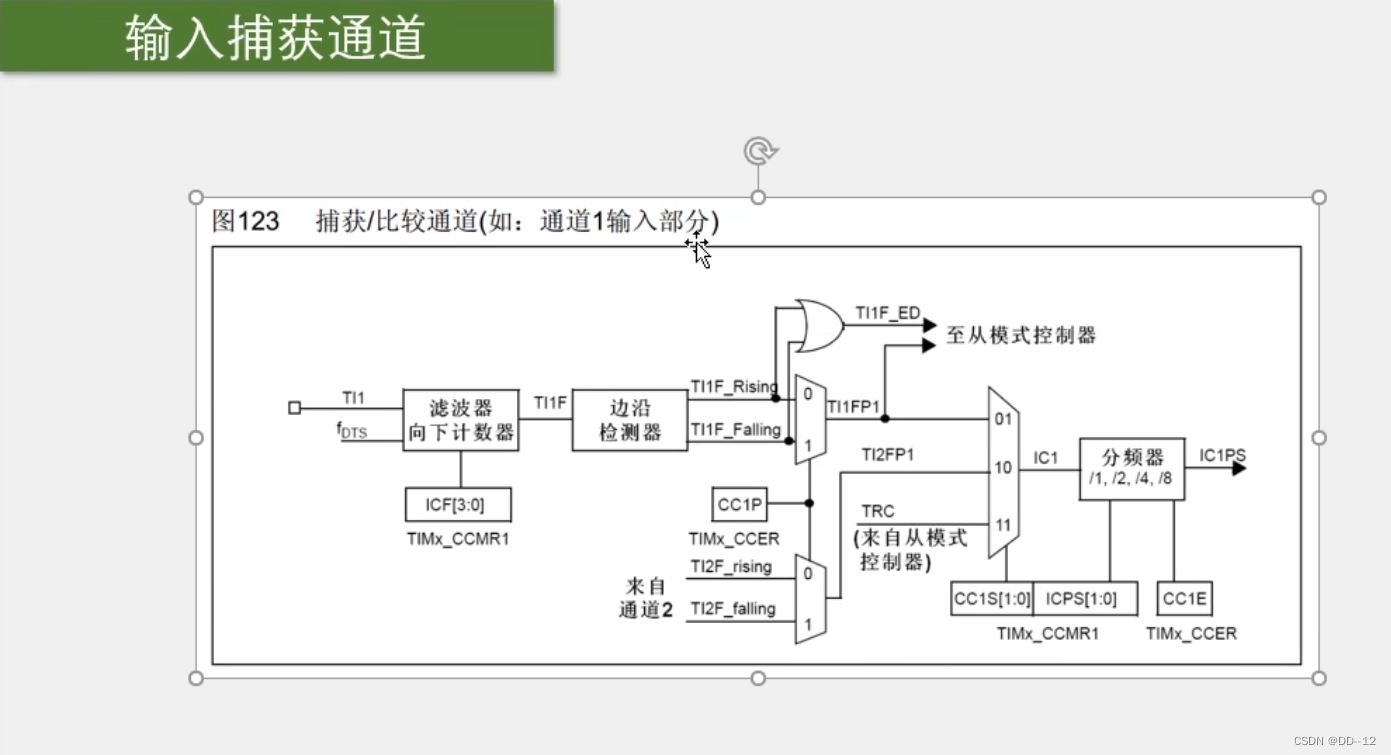
3.输入捕获通道结构
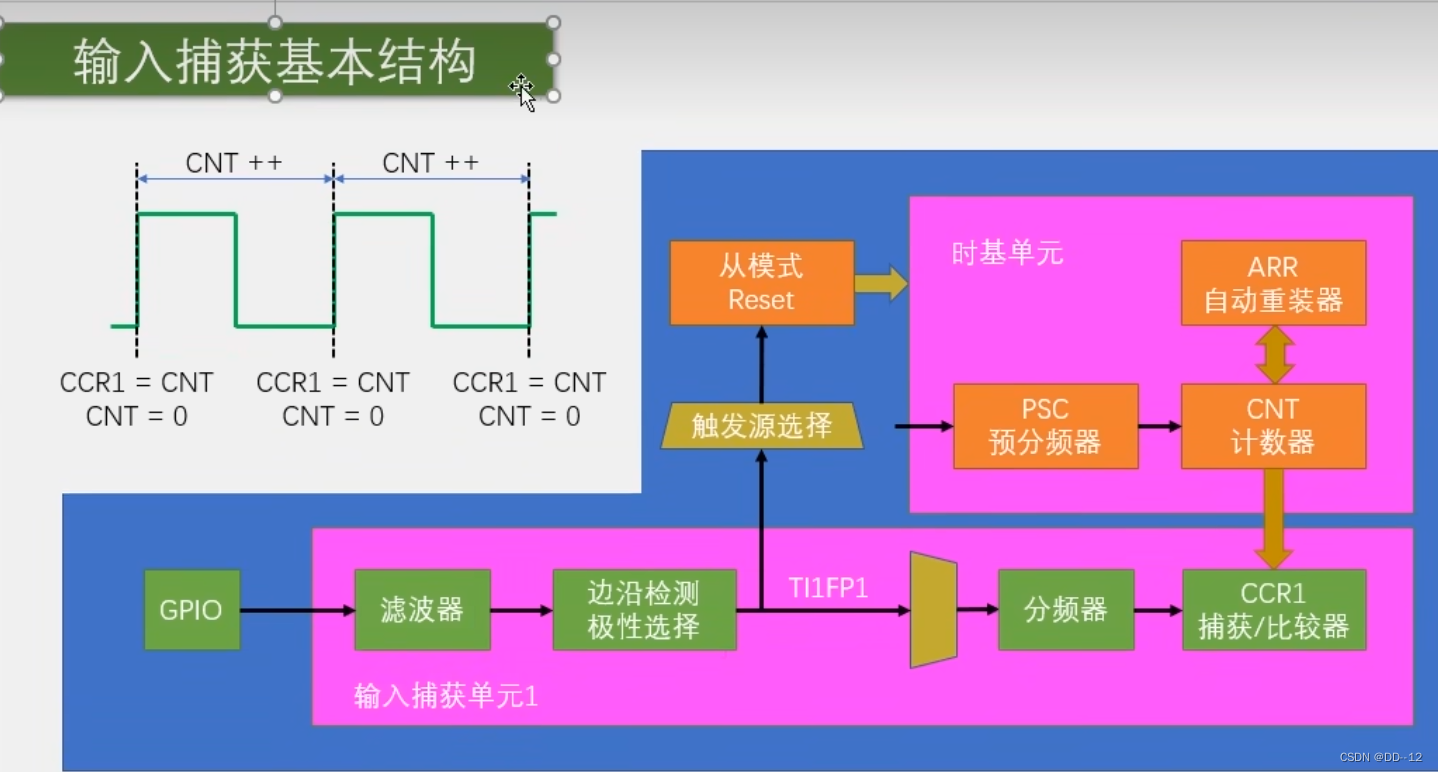
PWMI基本结构

TIFP2为下降沿触发,这样ccr1就是整个周期的计数值,ccr2就是高电平的计数值
 本文介绍了STM32的TIM输入捕获功能,包括频率测量、主从触发模式、输入捕获通道结构及相关的库函数。通过配置输入捕获单元、选择触发源和设置通道分频器,实现对高频和低频信号的测量,并提供了读取捕获值的函数。
本文介绍了STM32的TIM输入捕获功能,包括频率测量、主从触发模式、输入捕获通道结构及相关的库函数。通过配置输入捕获单元、选择触发源和设置通道分频器,实现对高频和低频信号的测量,并提供了读取捕获值的函数。
1.输入捕获简介
频率测量方式:
测频法适合高频信号,而测周法适合低频信号
2.主从触发模式
主模式可以将定时器内部的信号映射到TRGO引脚用于触发别的外设
从模式是接收其他外设或者自身外设的一些信号用于控制自身定时器的运行
3.输入捕获通道结构
PWMI基本结构
TIFP2为下降沿触发,这样ccr1就是整个周期的计数值,ccr2就是高电平的计数值
 134
1329
134
1329











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















