






自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真
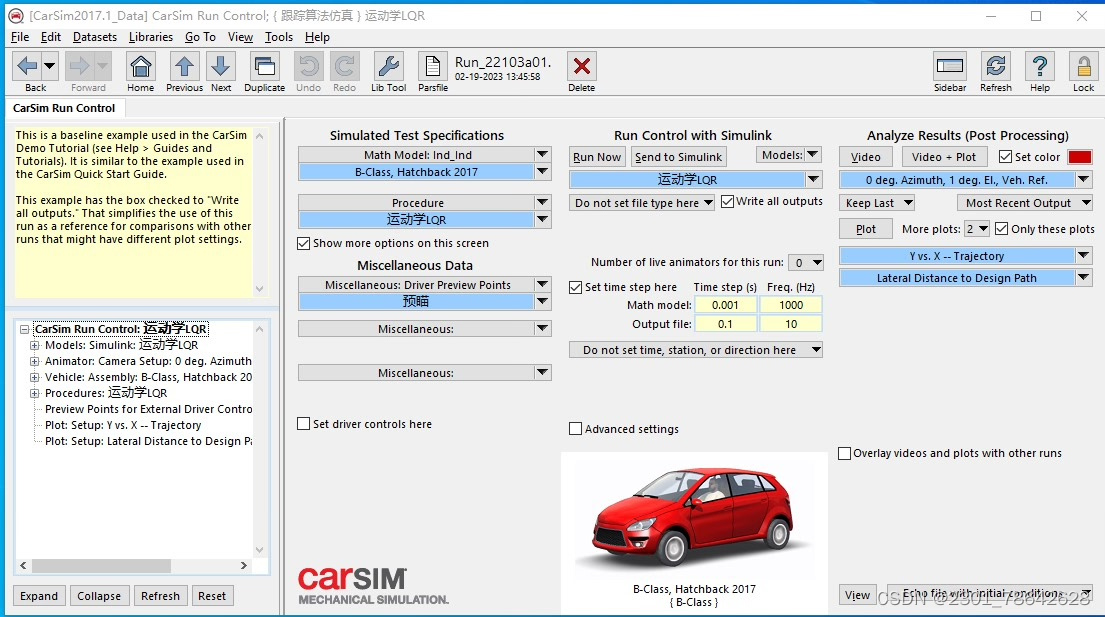
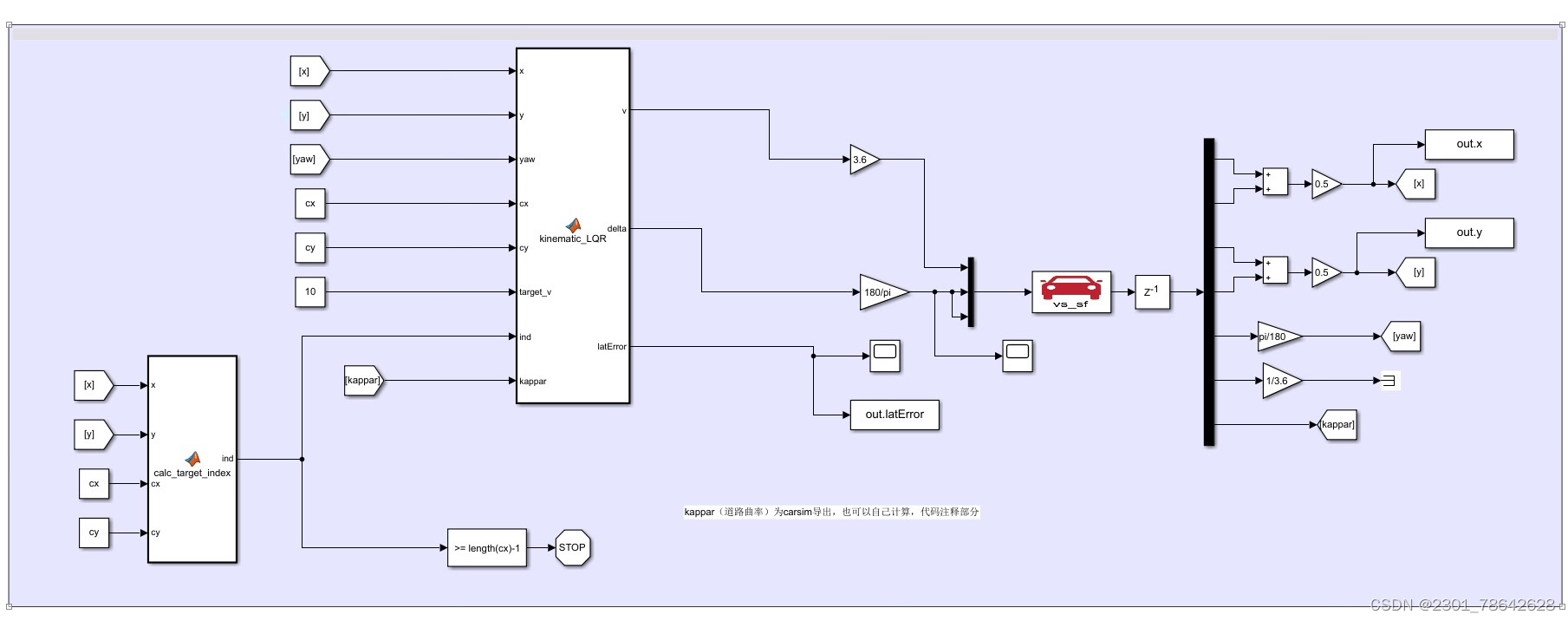
matlab和simulink联合仿真,运动学模型实现的lqr横向控制,可以跟踪双移线,五次多项式,以及其他各种自定义路径。
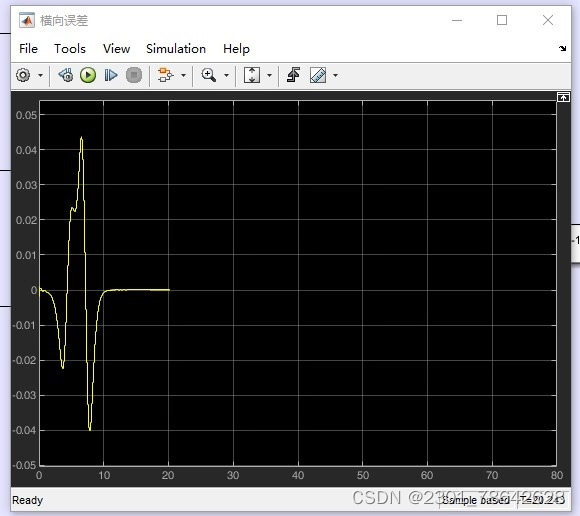
效果如图,几乎0误差,双移线路径误差在0.05m以内。
YID:6835704572222728

自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真
matlab和simulink联合仿真,运动学模型实现的lqr横向控制,可以跟踪双移线,五次多项式,以及其他各种自定义路径。
效果如图,几乎0误差,双移线路径误差在0.05m以内。
YID:6835704572222728
 479
597
2835
479
597
2835











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























