







欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
随着自动驾驶技术的快速发展,车辆对环境的感知能力成为了关键技术之一。车道线检测是自动驾驶系统中的重要组成部分,尤其在弯道行驶时,准确的弯道检测能够确保车辆沿着正确的轨迹行驶,从而提高行驶的安全性和稳定性。本项目旨在利用Python和OpenCV库,实现汽车车道的弯道检测功能,为自动驾驶系统的研发提供技术支持。
二、技术框架与工具
Python:Python语言简洁易读,具有丰富的库和框架支持,适合用于图像处理和数据分析。
OpenCV:OpenCV是一个开源的计算机视觉库,提供了大量的图像处理和计算机视觉算法,包括车道线检测所需的图像处理技术和特征提取方法。
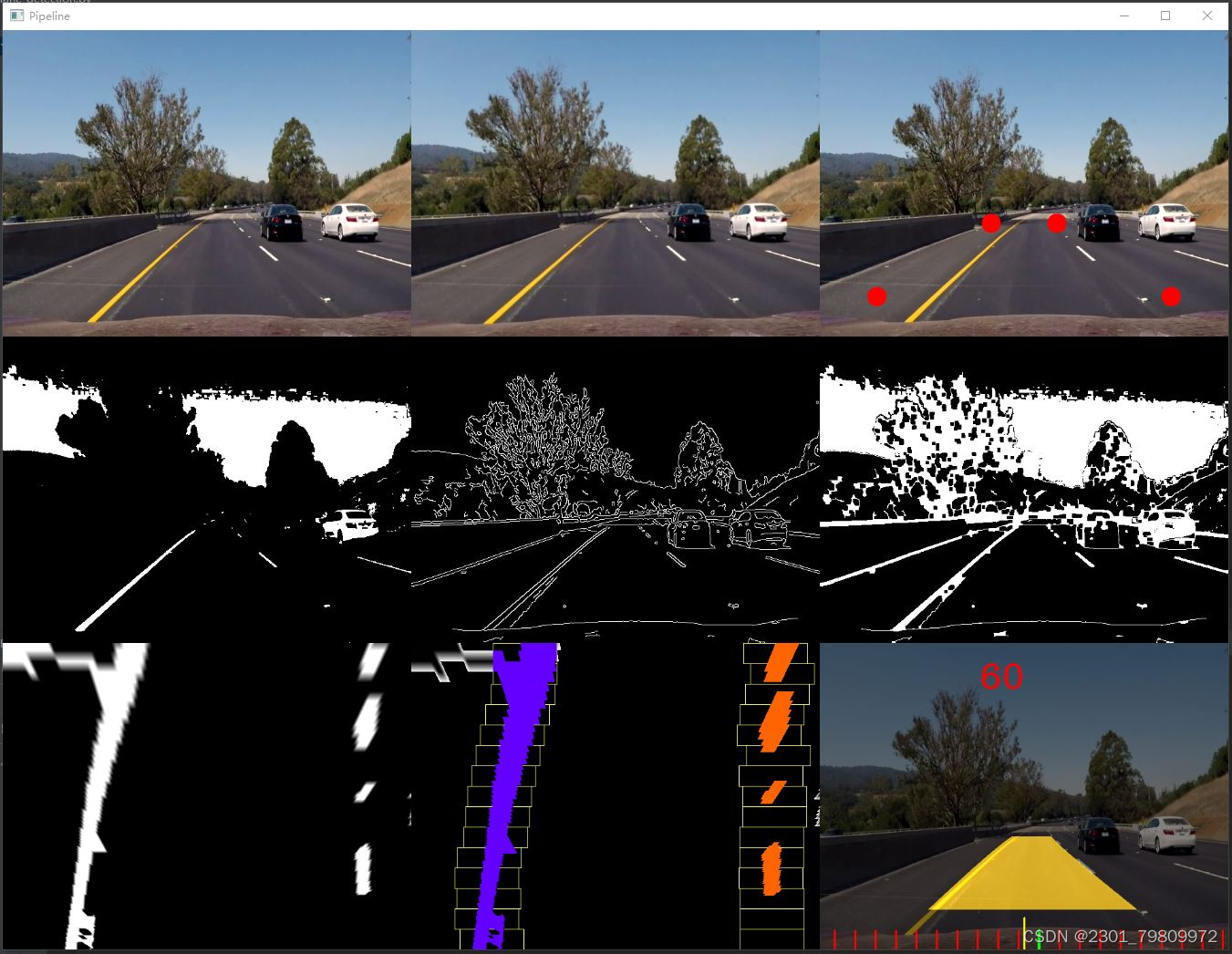
三、项目实现流程
图像预处理:
读取车载摄像头捕捉到的道路图像。
对图像进行灰度化、去噪、边缘检测等预处理操作,以突出车道线的特征。
车道线检测:
利用霍夫变换(Hough Transform)等算法检测图像中的直线段,这些直线段很可能是车道线。
通过设定合适的阈值和参数,筛选出符合车道线特征的直线段。
对筛选出的车道线进行拟合,得到车道线的数学模型(如多项式方程)。
弯道检测:
根据车道线的数学模型,计算车道线的曲率和方向。
通过分析连续帧中车道线曲率和方向的变化,判断车辆是否处于弯道行驶状态。
如果检测到弯道,可以进一步计算弯道的半径和曲率半径,以便车辆进行相应的控制调整。
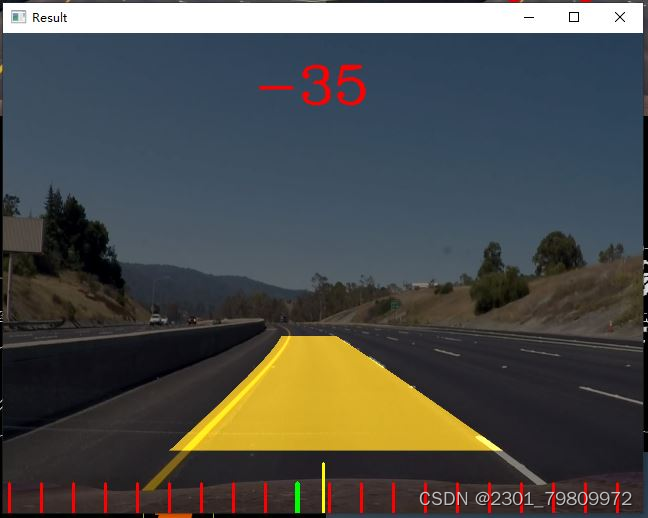
结果输出与可视化:
将检测到的车道线和弯道信息以图像或文本的形式输出。
可以在车载显示屏上实时显示车道线和弯道信息,帮助驾驶员或自动驾驶系统做出正确的驾驶决策。
四、项目特点与优势
实时性:项目利用OpenCV的高效性能,实现了对道路图像的实时处理和分析,保证了弯道检测的实时性。
准确性:通过优化算法参数和引入先进的图像处理技术,提高了车道线和弯道检测的准确性。
可扩展性:项目采用模块化设计,方便后续添加新的功能和优化现有功能。同时,可以与其他自动驾驶系统模块进行集成,形成完整的自动驾驶解决方案。
适应性:项目不仅适用于城市道路,还可以应用于高速公路、乡村道路等不同场景的车道弯道检测。
二、功能
基于Python+OpenCV汽车车道弯道检测
三、系统
四. 总结
实现一个基于Python+OpenCV的汽车车道弯道检测系统,为自动驾驶系统的研发提供技术支持。
通过实际应用验证系统的有效性和可靠性,为相关领域的研究和应用提供有价值的参考。
推动自动驾驶技术在车道线检测和弯道行驶方面的应用和发展,提高自动驾驶系统的安全性和稳定性















 3870
3870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









