






测距原理
激光测距仪应用的原理大致分为三种,分别是脉冲测距、三角测距、相位法测距。
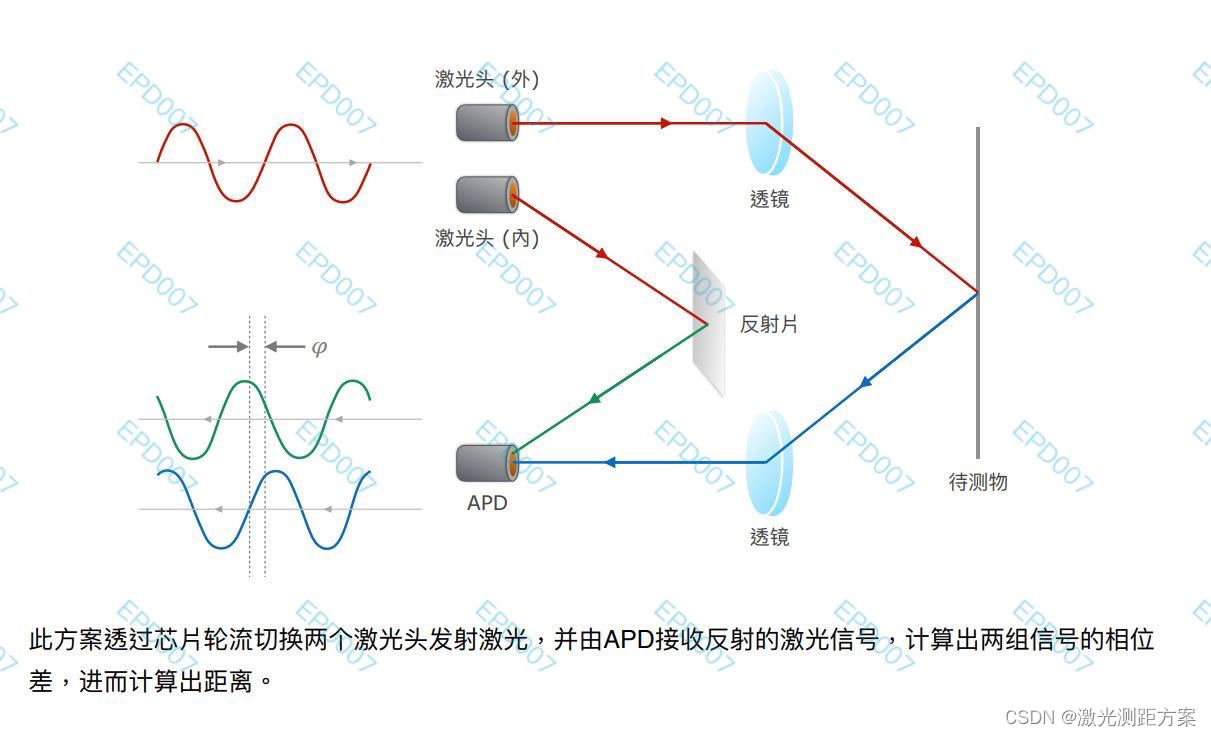
本方案主要应用的是相位法测距,调制的连续的信号,通过激光器发射出去,遇到目标障碍物反射回来,接收器接收信号,主控单元通过测量光束往返中产生的相位变化,计算出目标的距离。如下图所示:
原理框图
系统框图
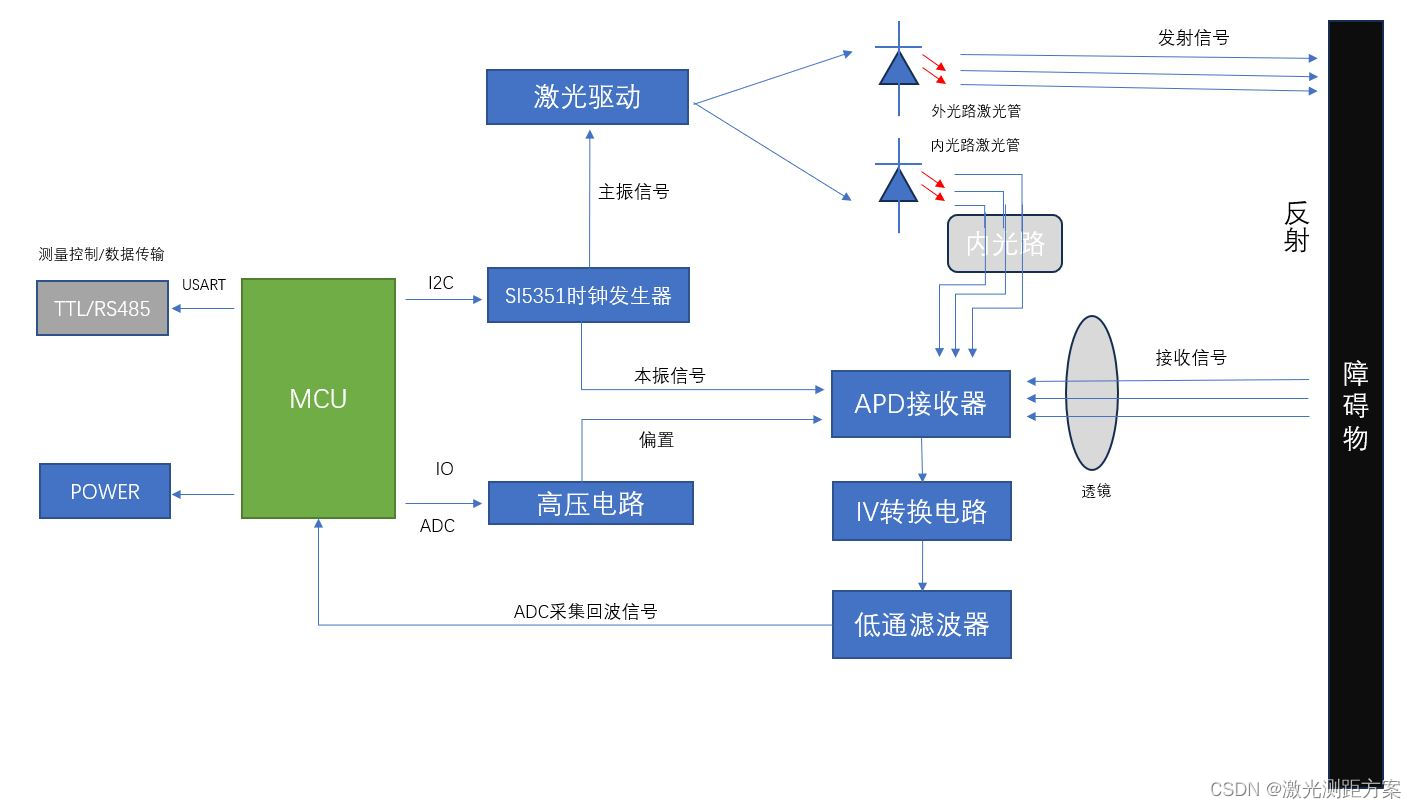
手持式测距仪实现测距功能不仅仅需要对信号进行采集、处理、计算,还需要综合考虑成本、供货、国产替换等问题,因此综合考虑,选择STM32F030系列的芯片作为产品的MCU,在成本性能方面有相对的优势。测距仪的另一核心时钟发生芯片,这里选用的的是Si5351这颗料,在成本方面有绝对的优势,除此之外,测距仪还需要有LCD显示模块、按键模块、电源模块、偏置高压模块、激光驱动、信号处理模块等。 通过单片机内部ADC对内外光路回来的信号采集并进行数据处理,最终计算出来的距离通过TTL或者RS485串口在串口助手上显示,除此之外MCU还通过I2C接口对DDS进行控制产生测量相位差需要用到的两路信号,即主振与本振信号;Si5351是一颗低成本高精度的DDS芯片,能产生高达200多M的时钟源,用在测距仪这种对成本敏感的产品上十分合适;两颗激光管分别应用在内外光路上,内光路激光管不需要加透镜,外光路激光管则需要添加透镜;APD雪崩二极管工作需要反向偏置高压才能使其达到雪崩倍增的状态,因此需要加入一个受MCU控制的高压电路 具体如下图所示:
系统框图
硬件
硬件部分主要包括发射板、接收板。
原理图
发射Logic
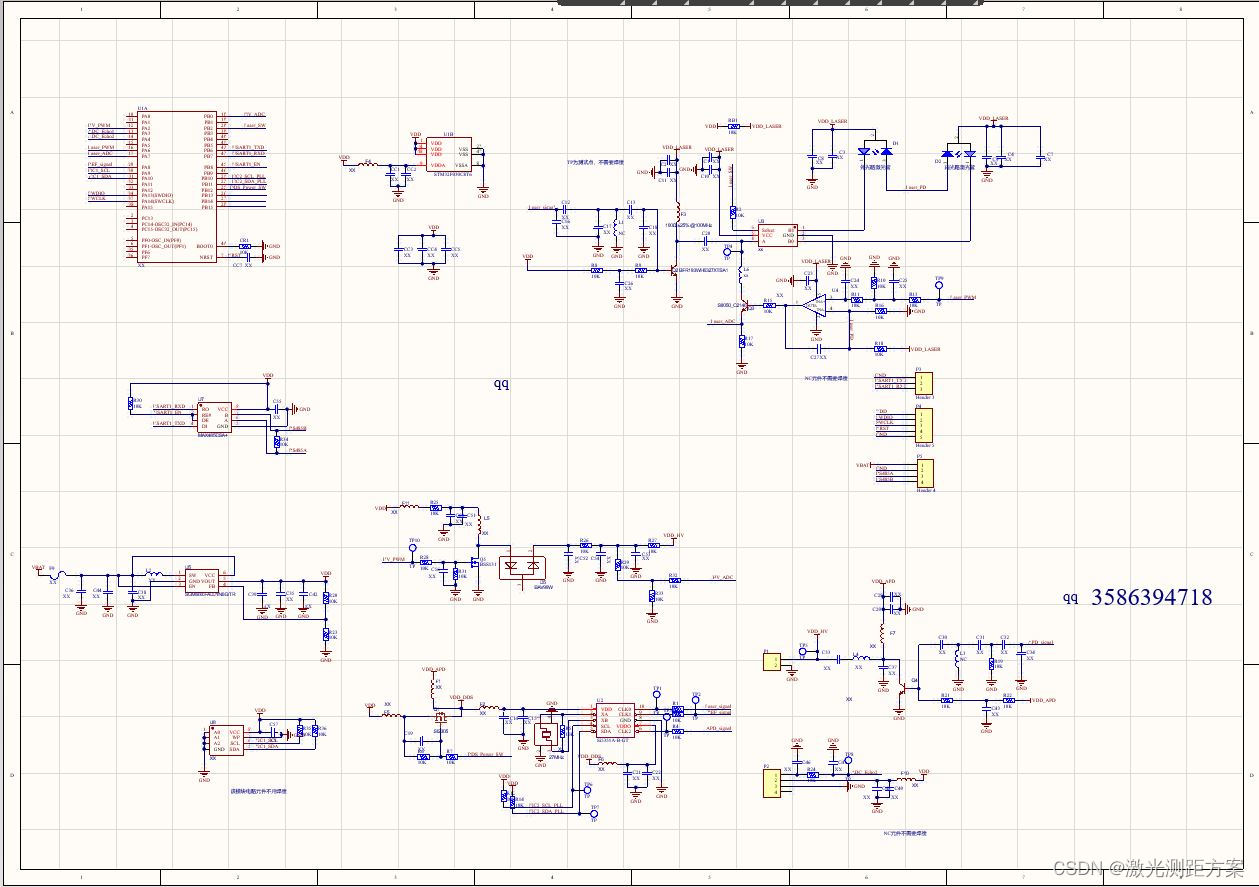
MCU主控电路(STM32);数据存储电路(24c02),内外光路切换电路及apc自动功率调节电路(SGM3157,TP1561A),RS485通讯电路(max485),DDS时钟发生电路(SI5351),APD偏置高压电路等,具体如下图所示;
接收Logic
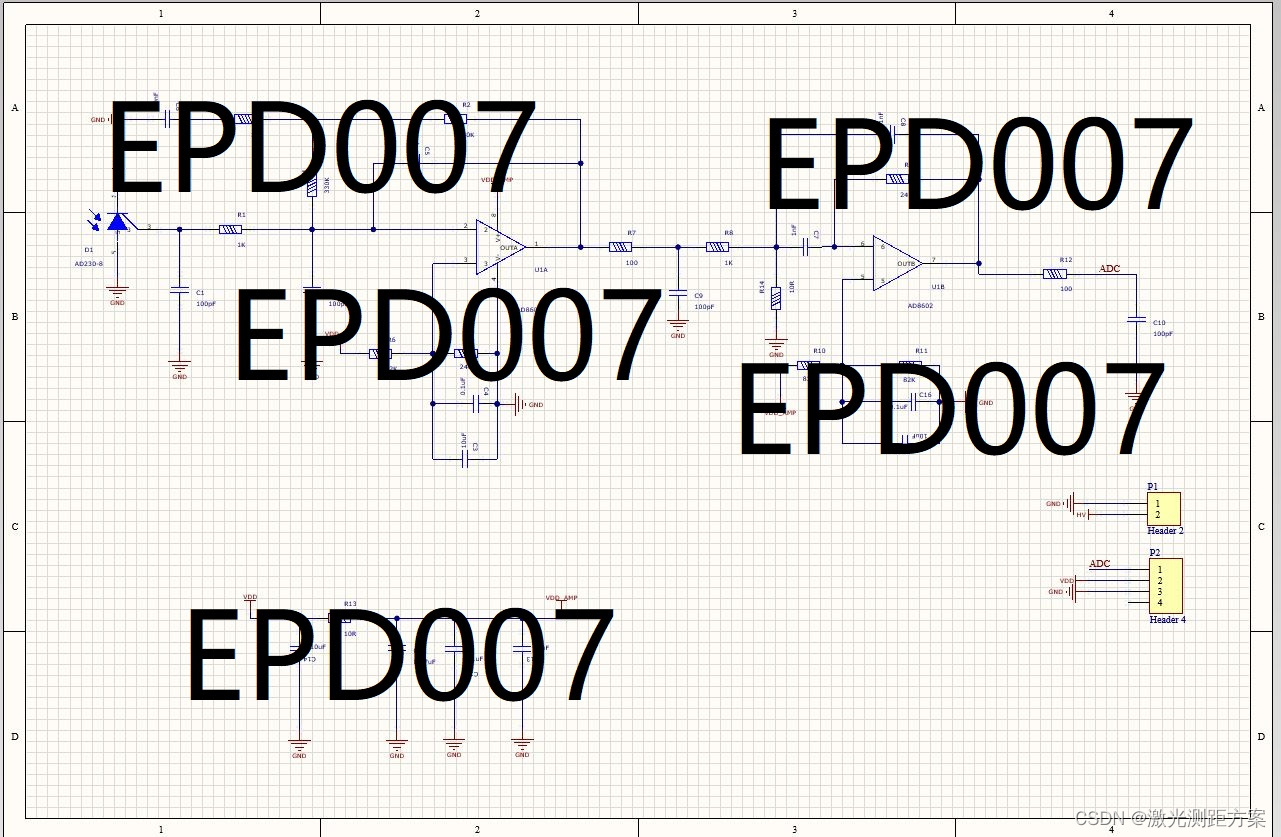
相位式激光测距仪对精度要求很高,需要达到毫米级的精度,APD抗干扰性较弱,容易受到温度特性的影响,并且受限与STM32 adc采集电压0~3.3V,因此在信号调理这一块需要下足功夫,这里选择的是ADI的AD8602双路轨对轨运放,低失调、极低的输入偏置电流和高速度特性相结合,能更好实现高精度测量。APD雪崩二极管选择的是AD280-8,这颗料价格相当高,并且很难买,但好在有国产可以替代。AD8602前级组成的是跨阻放大电路(IV转换电路),将光电流转换城电压的形
式,后级则是一个低通滤波器,详情请看图:
PCB
发射PCB
短距离激光测距仪发射的信号属于高频信号,因此PCB设计方面需要有所考量,特别高频信号线,电源、地等设计。下图是发射板的PCB图:
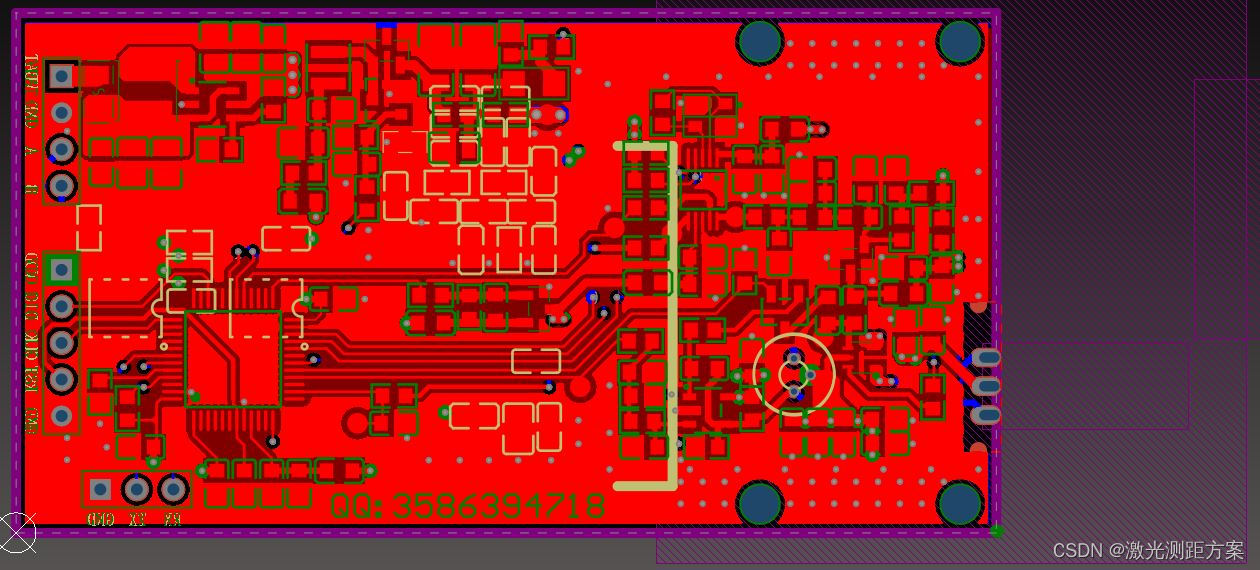
TOP
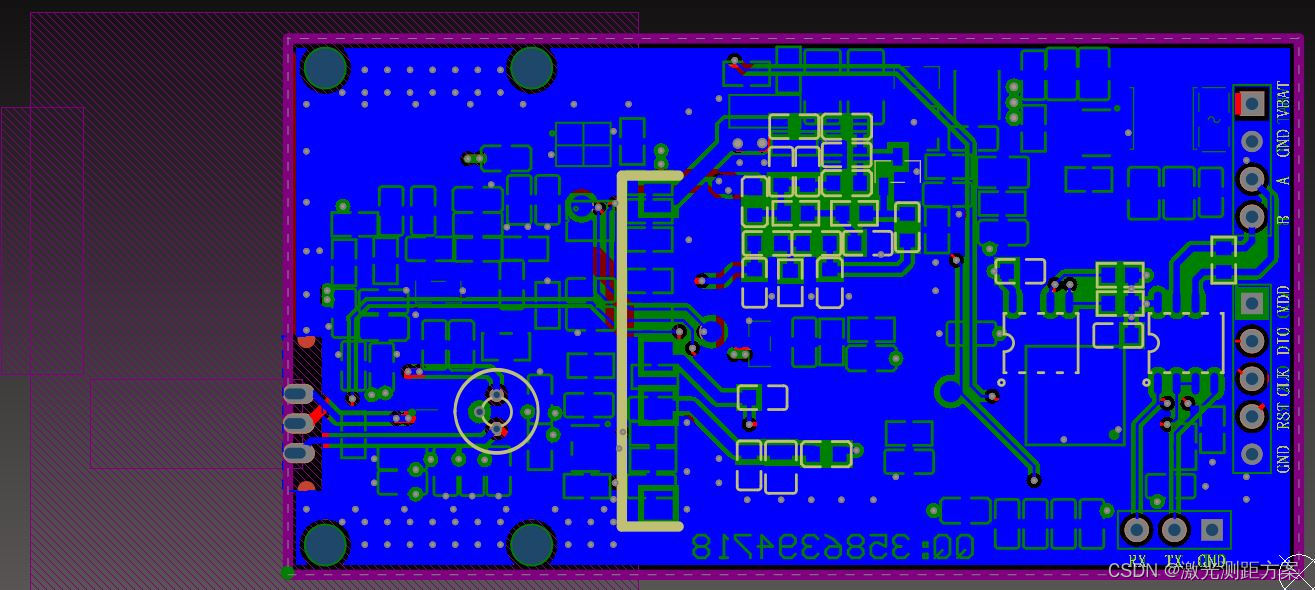 BOT
BOT
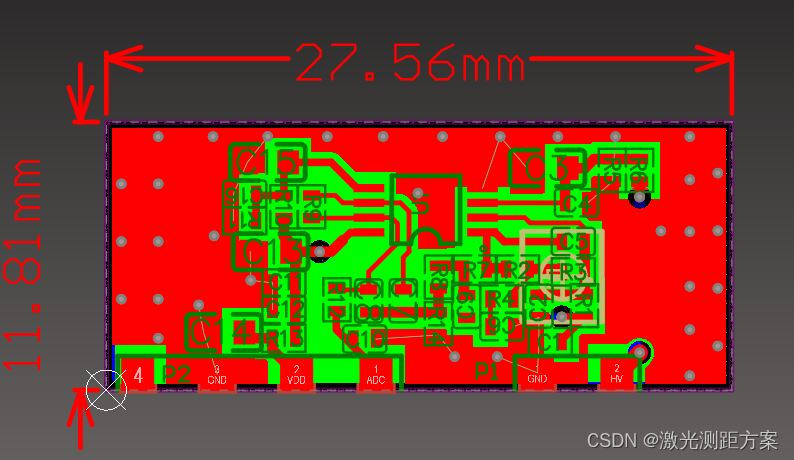
接收PCB
为了兼顾光学结构件,更好的接收光信号,需要将激光发射器单独安装在一块板子上,APD接收器·则装在一块小板子上,保持于发射板垂直安装,下图为接收板的PCB图:
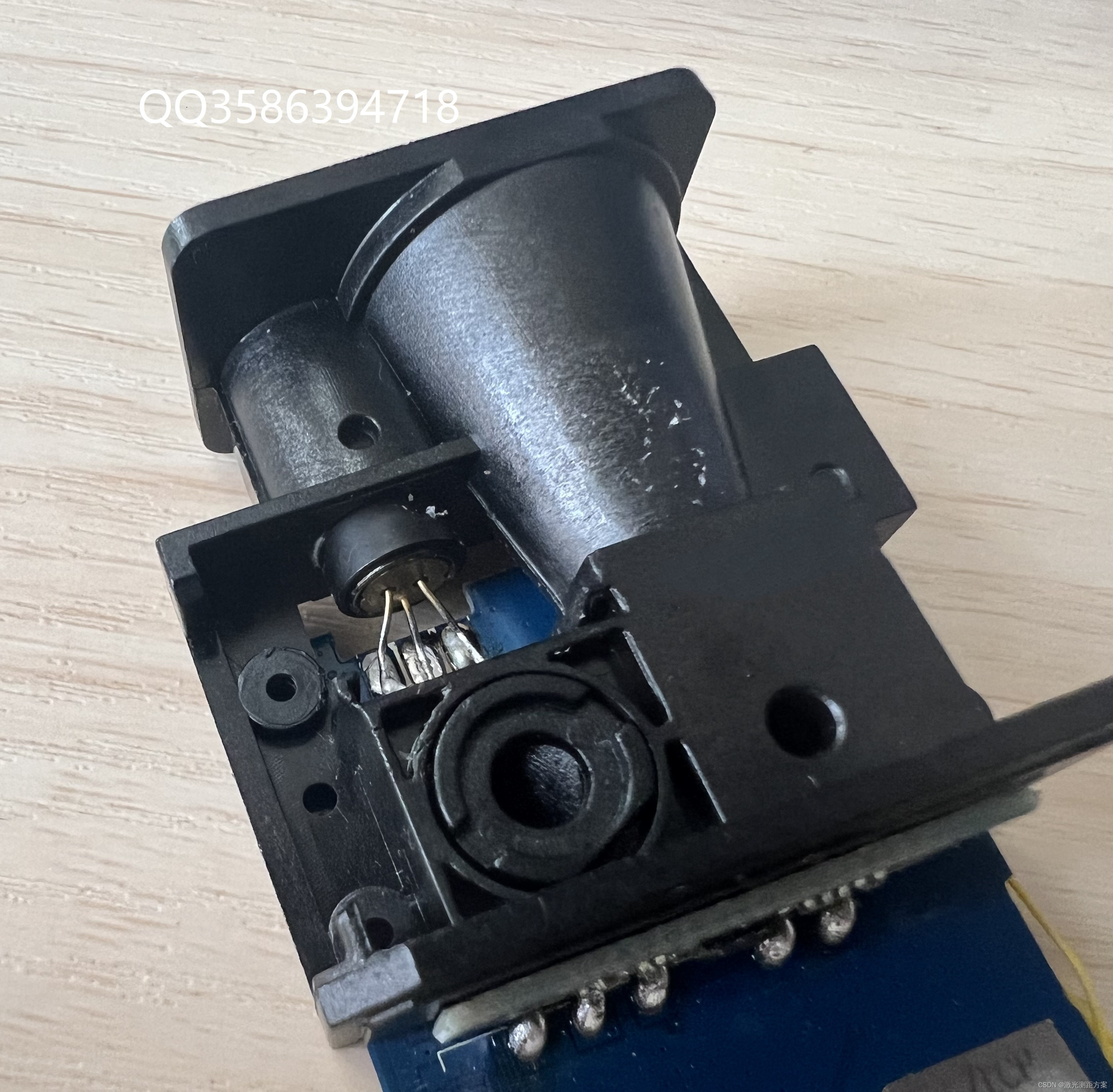
3D实物
本方案是在原在售产品基础上修改,去掉了LCD显示、按键、电池供电模块,直接做成传感器模块的形式,可通过TTL、RS485等接口发送测量指令并获取测量距离数据,实物与3D效果如下所示:
光学结构
激光测距仪如果仅靠发射器、接收器、硬件电路是无法实现测距功能的,还需要增加光学模块。本方案使用一个塑料结构件,将电路板与光学镜片结合起来,以下是光学结构的零件图: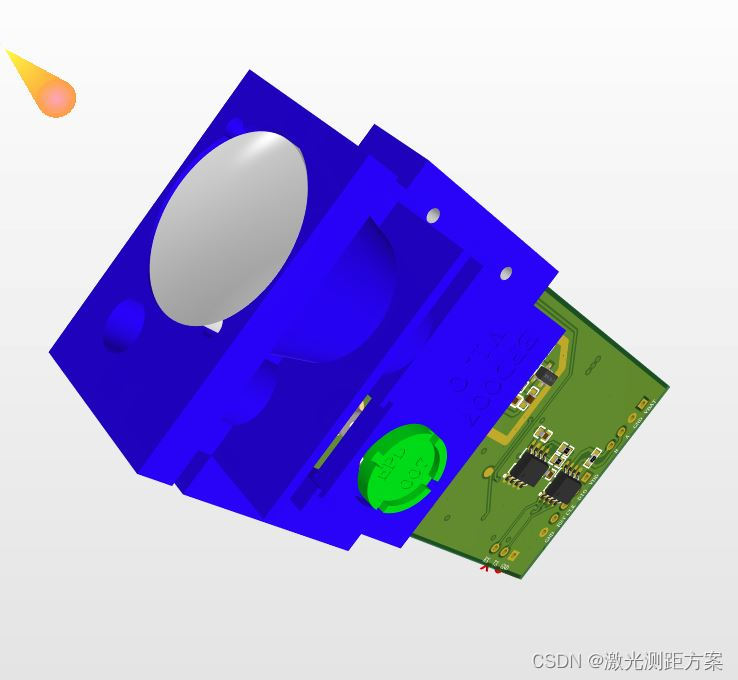
软件
文件
方案文件包含原理图、PCB、源代码、光学结构图、元件数据手册、物料供应商、技术支持等等,
产品应用
1、物料定位
2、误差测量
3、建筑行业测量
4、避障
性能指标
1、测量精度+-1.5mm,
2、测量范围0.05~60m,
3、待机功耗<1mW,
4、激光波长635~650nm,

















 4132
4132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









