






中断蜂鸣器
中断蜂鸣器是一种可以通过中断信号控制的蜂鸣器,通常用于在特定事件发生时发出声音提示。在51单片机中,可以通过设置中断向量表和相应的中断服务程序来实现对蜂鸣器的控制。当中断事件发生时,中断服务程序会被触发,从而产生相应的蜂鸣器控制信号,使蜂鸣器发出声音。中断蜂鸣器在51单片机中常用于实现警报、提醒和提示功能。
51单片机中断蜂鸣器频率计算方法
根据定时器的计数值和时钟源的频率计算出定时器的计数频率。例如,如果定时器的计数值为N,时钟频率为Fclk,则定时器的计数频率为Ftimer = Fclk / N
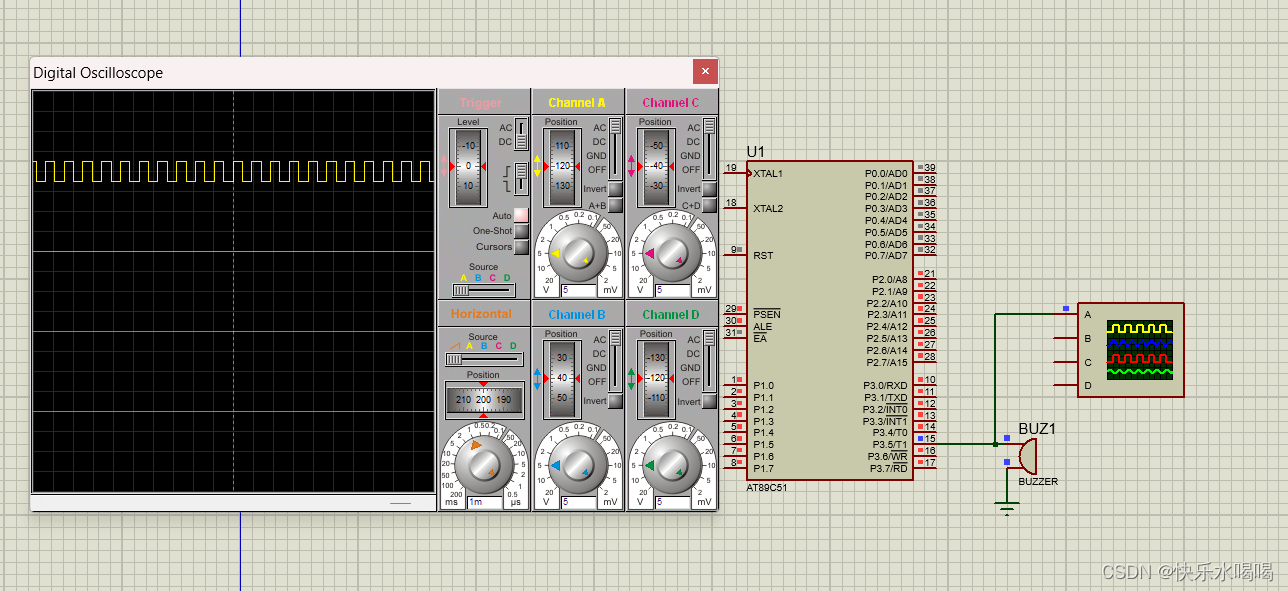
仿真图
代码实现
#include <REGX52.H>
sbit sound=P3^5;
void main()
{
EA=1;
ET1=1;
TMOD=0x10;//设置工作方式
TH1=0xfe;//500微秒中断
TL1=0x33;//设置定时器1的低8位初值
TR1=1;//启动定时器1。
while(1)
{ }
}
void Timer1_Routine() interrupt 3 // 中断函数优先级3
{
TH1=0xfe;
TL1=0x33;
sound=~sound;
}通过这段代码,当定时器1中断被触发时,蜂鸣器的状态将会翻转,从而实现蜂鸣器的发声和停止。请确保硬件连接正确,并根据需要调整定时器的初值和蜂鸣器的频率以获得期望的效果。
在普中开发板上成功
WeChat1_20240420201405
LED数码管秒表
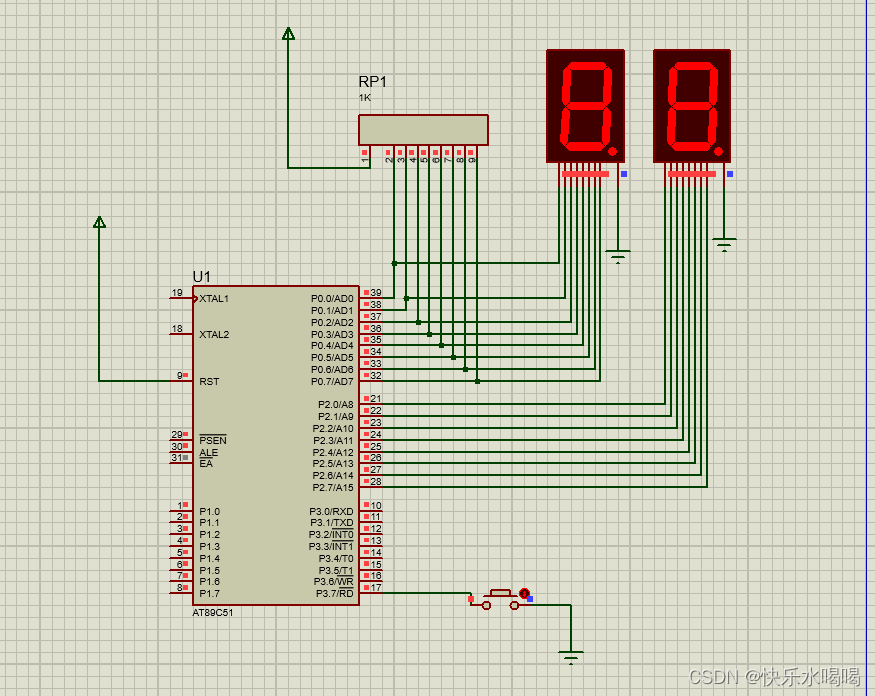
LED数码管秒表的制作。用2位数码管显示计时时间,最小计时单位为“百毫秒”,计时范围0.1~9.9s。当第1次按一下计时功能键时,秒表开始计时并显示;第2次按一下计时功能键时,停止计时,将计时的时间值送到数码管显示;如果计时到9.9s,将重新开始从0计时;第3次按一下计时功能键,秒表清0。再次按一下计时功能键,则重复上述计时过程
代码
#include<reg51.h>
typedef unsigned int uint; //定义无符号整形和字符型
typedef unsigned char uchar;
uchar led[] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //共阳数码管 0 - 9
uchar led1[] = {0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10}; //共阳数码管 0 - 9 加小数点
uchar second; //秒数
uchar key; //按键次数
uint t; //用来计数,每500,代表0.1s
sbit keyif = P3^7; //按键接口
void delay(){ //延时函数,用于消除抖动
uchar i,j;
for(i=0;i<255;i++){
for(j=0;j<100;j++);
}
}
void init(void) //初始化
{
TMOD = 0x02; //0000 0010 使用方式二
second = 0; //秒数初始化为0
EA = 1; //总中断,定时器0中断允许
ET0 = 1; //允许定时器0中断
key = 0; //按键次数初始化为0
t = 0; //计数初始化为0
}
void main(){
init();
P0 = led1[second/10];
P2 = led[second%10];
while(1){
if(keyif == 0){
delay();//消除抖动
if(keyif == 0){
key++;
switch(key){
case 1: //按一次,计时器开始
TH0 = 0x38;
TL0 = 0x38; //200us,也就是0.2ms
TR0 = 1;
break;
case 2: //按两次,暂停定时器
t = 0;
TR0 = 0;
break;
case 3: //按三次,停止计时,数据清零
key = 0;
second = 0;
P0 = led1[0];
P2 = led[0];
break;
}
while(keyif == 0); //若一直按下,使其停留
}
}
}
}
void timer() interrupt 1
{
TR0 = 0; //停止计时
t++;
if(t == 500){
second++;
P0 = led1[second/10];
P2 = led[second%10];
t = 0;
}
if(second == 99){ //当计数到9.9秒,重新开始计时
second = 0;
key = 1; //相当于重新开始计时
}
TR0 = 1; //继续启动计时器
}
仿真结果

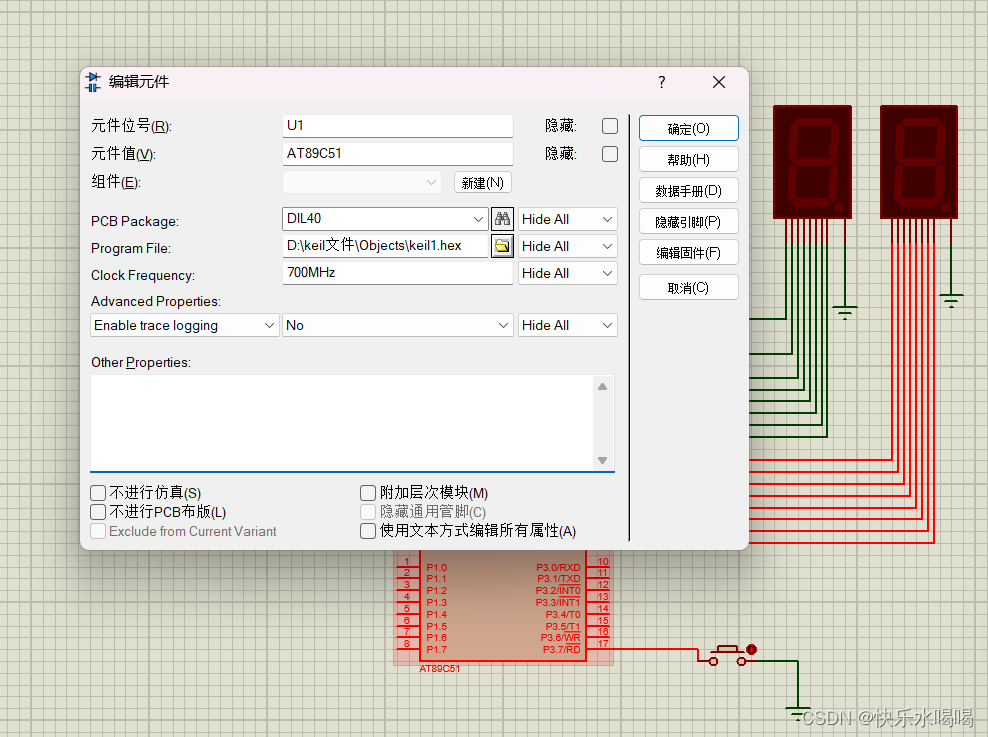
在普中开发板上成功
在仿真测试中可以适当给单片机调速,我设成了700
3.使用定时器实现一个LCD显示时钟
LCD1602模块是一种常见的字符型液晶显示模块,它包含两行每行可以显示16个字符的显示区域,共计32个字符。该模块采用了HD44780控制器,可以通过简单的接口与单片机进行通信,实现字符的显示和控制。LCD1602模块通常由LCD显示屏、背光灯、对比度调节电位器和控制电路组成,可以通过外部电路控制显示内容、亮度和对比度等参数。该模块广泛应用于各种嵌入式系统和DIY项目中,如温度计、时钟、计数器等。LCD1602模块操作简单,易于使用,是学习和应用液晶显示技术的理想选择。通过控制器的指令集,用户可以实现字符的显示、清除、光标控制等功能,为项目的界面设计提供了便利。
代码
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
int hours = 0;
int minutes = 0;
int seconds = 0;
void setup() {
lcd.begin(16, 2);
lcd.print("Time: 00:00:00");
// 设置定时器,每隔1秒调用一次updateClock函数
Timer1.initialize(1000000);
Timer1.attachInterrupt(updateClock);
}
void loop() {
// do nothing
}
void updateClock() {
seconds++;
if (seconds == 60) {
seconds = 0;
minutes++;
}
if (minutes == 60) {
minutes = 0;
hours++;
}
if (hours == 24) {
hours = 0;
}
lcd.setCursor(0, 1);
lcd.print("Time: ");
if (hours < 10) {
lcd.print("0");
}
lcd.print(hours);
lcd.print(":");
if (minutes < 10) {
lcd.print("0");
}
lcd.print(minutes);
lcd.print(":");
if (seconds < 10) {
lcd.print("0");
}
lcd.print(seconds);
}
protuse仿真图
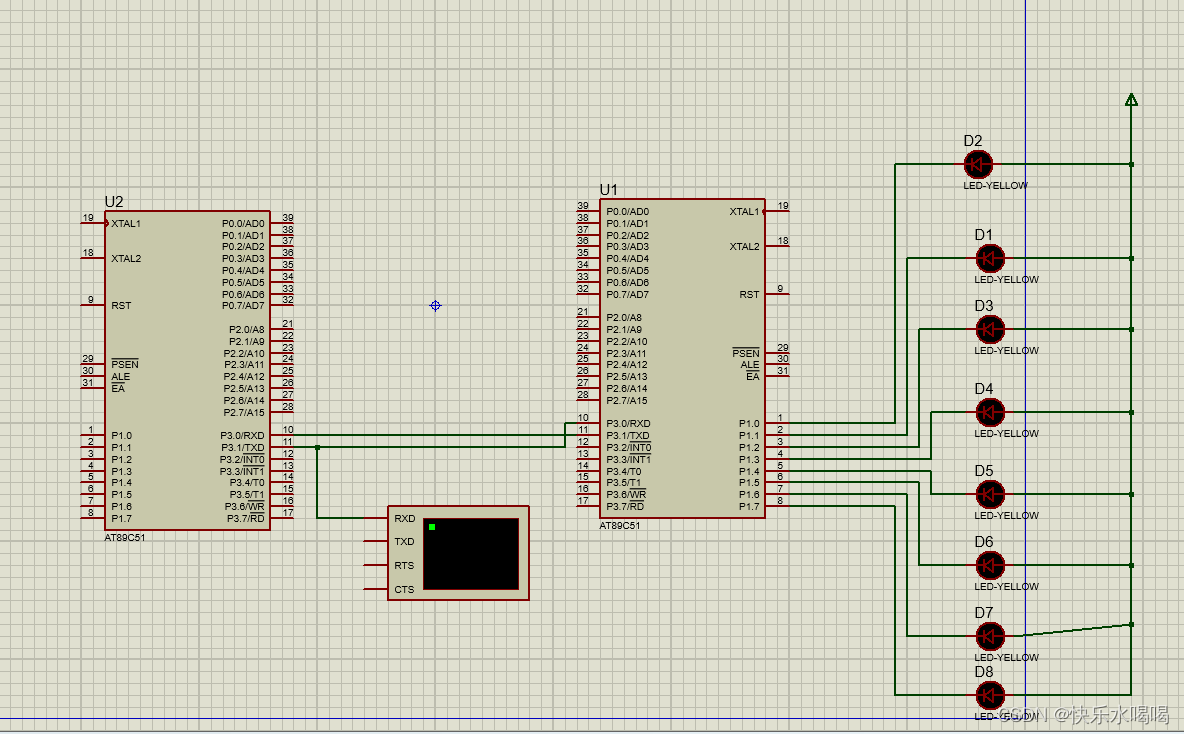
4.两个个单片机串口通信
串口通信是一种常用的通信方式,可以实现不同单片机之间的数据传输。在两个单片机之间进行串口通信时,一般需要确保它们之间的串口参数(如波特率、数据位、校验位、停止位)设置一致,以便正确地接收和解析数据。
以下是两个单片机串口通信的简要步骤:
1. 确定串口参数:首先确定两个单片机之间的串口参数,包括波特率、数据位、校验位和停止位等设置。通常情况下,需要确保两个单片机的串口参数设置一致。
2. 配置串口:在每个单片机的程序中,需要使用相应的串口库或函数来配置串口,设置好串口参数。例如,在Arduino中可以使用Serial.begin()函数来初始化串口。
3. 发送数据:在发送单片机中,使用串口库或函数将数据发送到另一个单片机。可以使用串口发送函数(如Serial.print()或Serial.write())来发送数据。
4. 接收数据:在接收单片机中,需要使用串口接收函数(如Serial.read()或Serial.available())来接收从另一个单片机发送过来的数据。
5. 处理数据:接收到数据后,可以对数据进行处理、解析和应答等操作,以完成通信过程。
需要注意的是,在进行串口通信时,要确保两个单片机之间的电气连接正确(如TX连接到RX),并且在发送和接收数据时要遵循一定的通信协议,以确保数据的正确传输和解析。
下面是protuse仿真图
代码
U1的
//甲机发送程序
#include <reg51.h>
sbit p=PSW^0; //P位为PSW寄存器的第0位,即奇偶校验位
unsigned char Tab[8]= {0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; //控制流水灯显示数据数组,为全局变量
void Send(unsigned char dat) //发送1字节数据的函数
{
TB8=p; //将偶校验位作为第9位数据发送
SBUF=dat;
while(TI==0); //检测TI,TI=0,未发送完
; //空操作
TI=0; // 1字节发送完,TI清0
}
void delay (void) //延时约200ms的函数
{
unsigned char m,n;
for(m=0;m<250;m++)
for(n=0;n<250;n++) ;
}
void main(void) //主函数
{
unsigned char i ;
TMOD=0x20; //设置定时器T1为方式2
SCON=0xc0; //设置串口为方式3
PCON=0x00; //SMOD=0
TH1=0xfd; //给T1赋初值,波特率设置为9600
TL1=0xfd;
TR1=1; //启动定时器T1
while(1)
{
for(i=0;i<8;i++)
{
Send (Tab[i]);
delay() ; //大约200ms发送一次数据
}
}
}
U2的
//乙机接收程序
#include <reg51.h>
sbit p=PSW^0; //P位为PSW寄存器的第0位,即奇偶校验位
unsigned char Receive(void) //接收1字节数据的函数
{
unsigned char dat;
while(RI==0) ; //检测RI,RI=0,未接收完,则循环等待;
;
RI=0; //己接收一帧数据,将RI清0
ACC=SBUF; //将接收缓冲器的数据存于ACC
if(RB8==p) //只有偶校验成功才能往下执行,接收数据
{
dat=ACC; //将接收缓冲器的数据存于dat
return dat; //将接收的数据返回
}
}
void main(void) //主函数
{
TMOD=0x20; //设置定时器T1为方式2
SCON=0xd0; //设置串口为方式3,允许接收REN=1
PCON=0x00; // SMOD=0
TH1=0xfd; //给定时器T1赋初值,波特率为9600
TL1=0xfd;
TR1=1; //接通定时器T1
REN=1; //允许接收
while(1)
{
P1= Receive( ); //将接收到的数据送P1口显示
}
}仿真效果
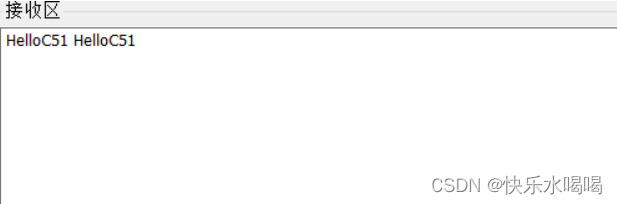
5.单片机串口与笔记本电脑串口模块相连
将单片机串口与笔记本电脑串口模块相连,单片机每隔2秒发送“Hello C51”,笔记本电脑用串口助手软件接收。 如果串口助手发送字符“0" 给单片机,则单片机停止发送; 如果单片机收到“1”,则继续每隔2秒发送“Hello C51”
代码
#include<reg51.h>
#define uint unsigned int
#define uchar unsigned char
uint p=0; //默认设置状态0
void delay_2s() //延时函数
{
int i,j;
for(i=0;i<21800;i++)
{
for(j=10;j>0;j--);
}
}
void uart_sendbyte(uchar byte)//发送字符
{
SBUF=byte;
while(TI==0);
TI=0;
}
void helloc51()
{
uart_sendbyte('h');
uart_sendbyte('e');
uart_sendbyte('l');
uart_sendbyte('l');
uart_sendbyte('o');
uart_sendbyte('c');
uart_sendbyte('5');
uart_sendbyte('1');
uart_sendbyte(' ');
}
void uart_init(uchar baud)//uart初始化
{
TMOD|=0X20;
SCON=0X50;
PCON=0X80;
TH1=baud;
TL1=baud;
ES=1;
EA=1;
TR1=1;
}
void uart() interrupt 4
{
if(RI==1)//读取串口发送的信息
{
uchar rec_data;
rec_data=SBUF;
RI=0;
if(rec_data==0)//发送0,设置为模式0
{
p=0;
}
else if(rec_data==1)//发送1,设置为模式1
{
p=1;
}
}
}
void main()
{
uart_init(0XFA);
while(1)
{
if(p==0)//状态0,不做操作
{
while(p==0)
{
}
}
else if(p==1)//状态1,循环输出hello c51并且延时2s
{
while(p==1)
{
helloc51();
delay_2s();
}
}
}
}
测试图
总结
总的来说,学习51单片机需要不断实践和积累经验,只有通过实际操作才能更好地掌握这项技能,
如有不足请多多补充,谢谢















 654
654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









