







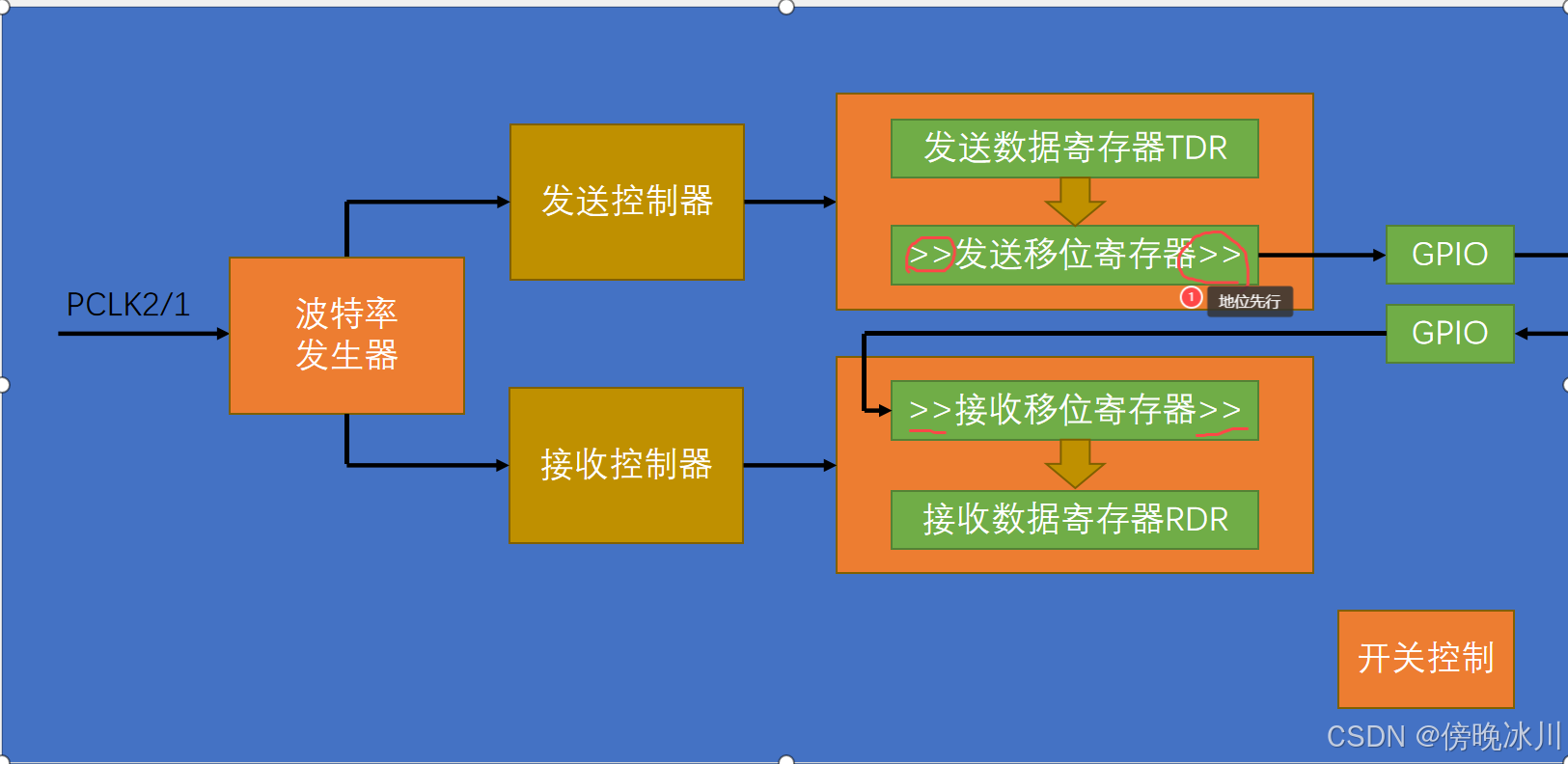
串口理论知识:【STM32】USART串口协议&串口外设-学习笔记-CSDN博客
数据模式
- HEX模式/十六进制模式/二进制模式:以原始数据的形式显示
- 文本模式/字符模式:以原始数据编码后的形式显示
ASCII编码表: 数字和字符串相互转换要查表
串口发送
 接线图
接线图
TX和RX要交叉连接
USART初始化
具体步骤:
①RCC开启时钟,把需要用到的USART和GPIO时钟打开
② GPIO初始化,把TX配置成复用输出,RX配置成输入
③配置USART,使用一个结构体配置参数
④开启USART
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx; //模式,选择为发送模式
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
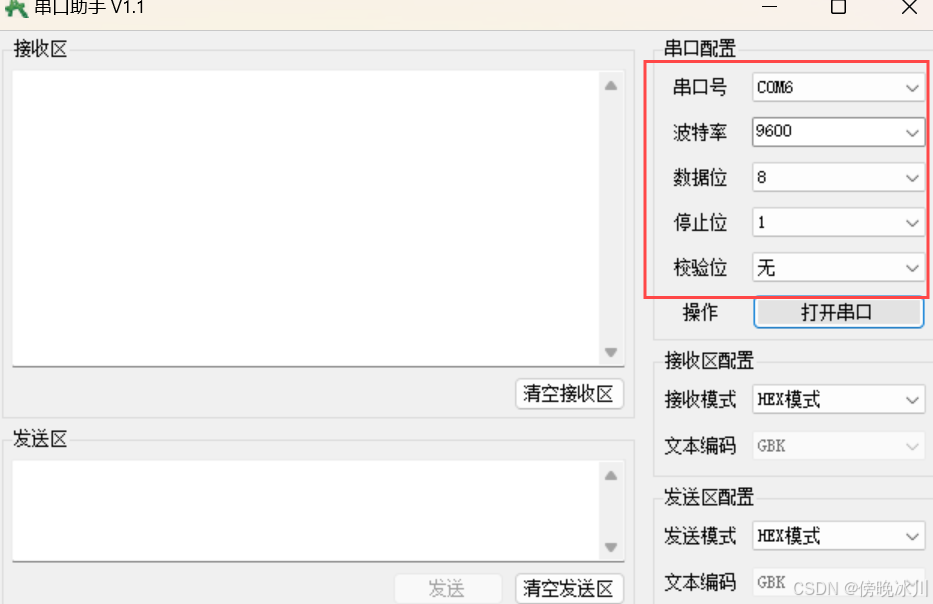
}串口助手配置要和串口初始化配置一样
函数解释:
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct)//初始化USARTx外设USART_InitStruct中的参数
USART Init结构定义:
| 参数 | 说明 |
| USART_BaudRate | 该成员配置USART通信波特率 |
| USART_WordLength | 指定帧中发送或接收的数据位数(8/9) |
| USART_StopBits | 指定传输的停止位数(0.5/1/1.5/2) |
| USART_Parity | 奇偶校验模式 |
| USART_Mode | 指定是否启用或禁用接收或发送模式(USART_Mode_Rx或USART_Mode_Tx) |
| USART_HardwareFlowControl | 是否开启硬件流控模式,一般不用 |
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState)//启用或禁用指定的USART外设
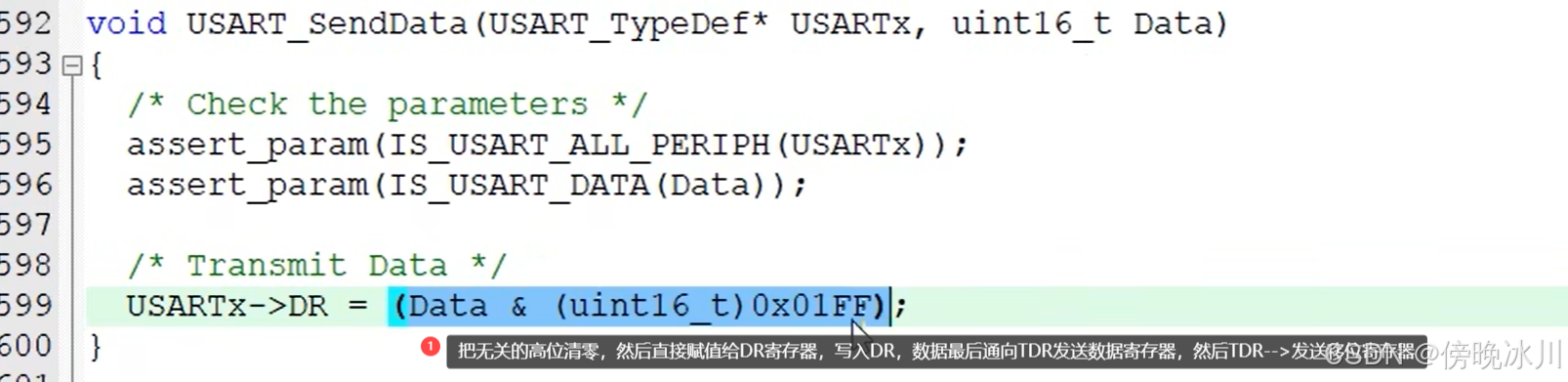
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)//通过USARTx外设传输单个数据
| 参数 | 说明 |
| USARTx | 选择USART或UART外设 该参数可以是以下值之一:USART1, USART2, USART3, UART4或UART5 |
| Data | 要传输的数据 |
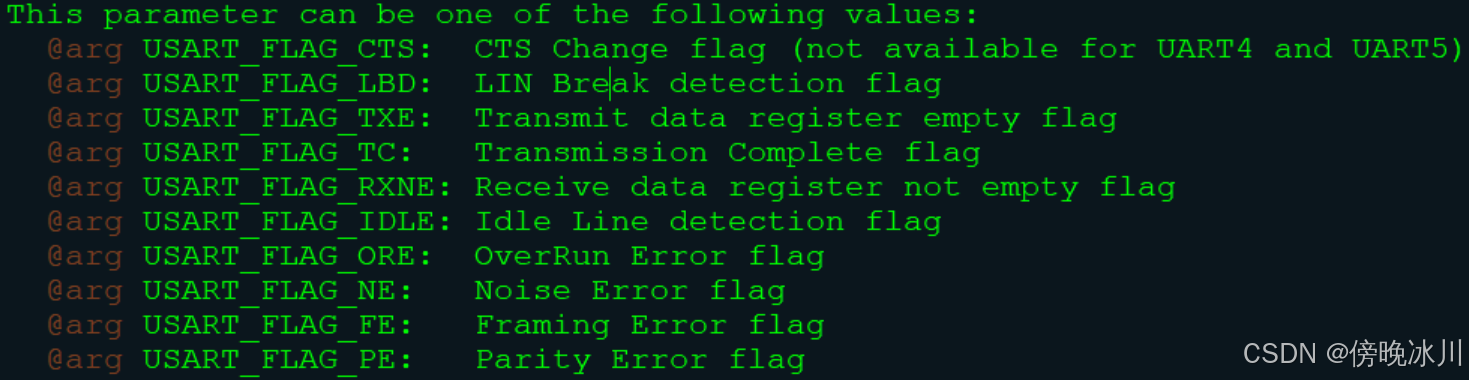
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG)//检查是否设置了指定的USART标志
| 参数 | 说明 |
| USARTx | 选择USART或UART外设 该参数可以是以下值之一:USART1, USART2, USART3, UART4或UART5 |
| USART_FLAG | 指定要检查的标志 |
返回值:USART_FLAG的新状态(SET或RESET)

注意:这里使用while()循环
Serial_SendByte函数发送一个字节:
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}main函数调用:
Serial_SendByte(0x41); //串口发送一个字节数据0x41按复位键发送一个字节数据0x41
对SendByte函数封装:
发送一个数组:
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++) //遍历数组
{
Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据
}
}main函数调用:
uint8_t MyArray[] = {0x42, 0x43, 0x44, 0x45}; //定义数组
Serial_SendArray(MyArray, 4); //串口发送一个数组按复位键发送一个数组42、43、44、45
发送字符串:
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *String)//由于字符串自带结束标志位,所以就不需要再传递长度参数了
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止,空字符,是字符串结束标志位
{
Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}main函数调用:
Serial_SendString("HelloWarld"); //串口发送字符串按复位键发送字符串HelloWarld
发送数字:
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字,取数字某一位公式:数字/10的X次方%10
}
}main调用:
Serial_SendNumber(111, 3); //串口发送数字按复位键发送数字111
printf函数移植:
把fputc重定向到串口:
头文件也必须加上
#include <stdio.h>
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}在子函数封装好上面的函数,就可以直接在main函数打印了
/*直接重定向printf,但printf函数只有一个,此方法不能在多处使用*/
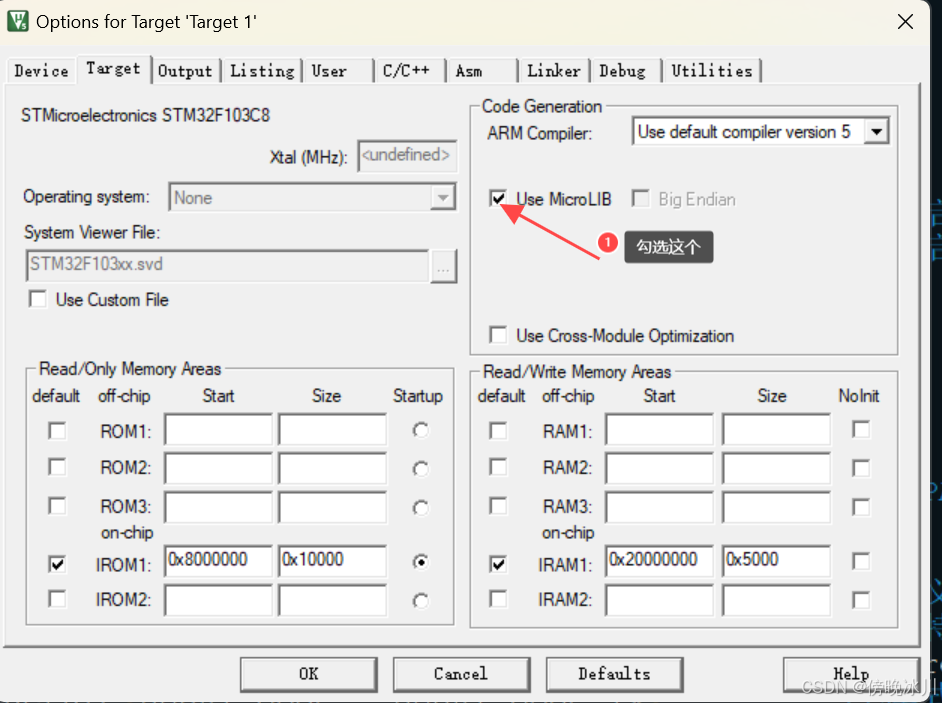
printf("\r\nNum2=%d", 222); //串口发送printf打印的格式化字符串
//需要重定向fputc函数,并在工程选项里勾选Use MicroLIB按复位键就会发送:Num2=222
为方便多个串口使用, up住还教了另外两个方法:
①直接在main函数写:
/*方法1:使用sprintf打印到字符数组,再用串口发送字符数组,此方法打印到字符数组,之后想怎么处理都可以,可在多处使用*/
char String[100]; //定义字符数组
sprintf(String, "\r\nNum3=%d", 333);//使用sprintf,把格式化字符串打印到字符数组
Serial_SendString(String); //串口发送字符数组(字符串)按复位键就会发送:Num3=333
②在子函数对方法①封装:
#include <stdarg.h> //对应也要加上头文件
/**
* 函 数:自己封装的prinf函数
* 参 数:format 接收格式化字符串
* 参 数:... 接收可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}
然后再main函数调用子函数:
/*方法2:将sprintf函数封装起来,实现专用的printf,此方法就是把方法1封装起来,更加简洁实用,可在多处使用*/
Serial_Printf("\r\nNum4=%d", 444); //串口打印字符串,使用自己封装的函数实现printf的效果
Serial_Printf("\r\n");按复位键就会发送:Num4=444
串口发送+接收
两种方法:
①查询法:
初始化函数:
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
}main函数:
uint8_t RxData;
int main(void)
{
OLED_Init();
Serial_Init();
while(1)
{
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) == SET)//查询法
{
RxData=USART_ReceiveData(USART1);
OLED_ShowHexNum(1,1,RxData,2);
}
}
}USART_FLAG_RXNE读取标志位: (注意上面是使用if判断,需要进入判断,所以直接给1) 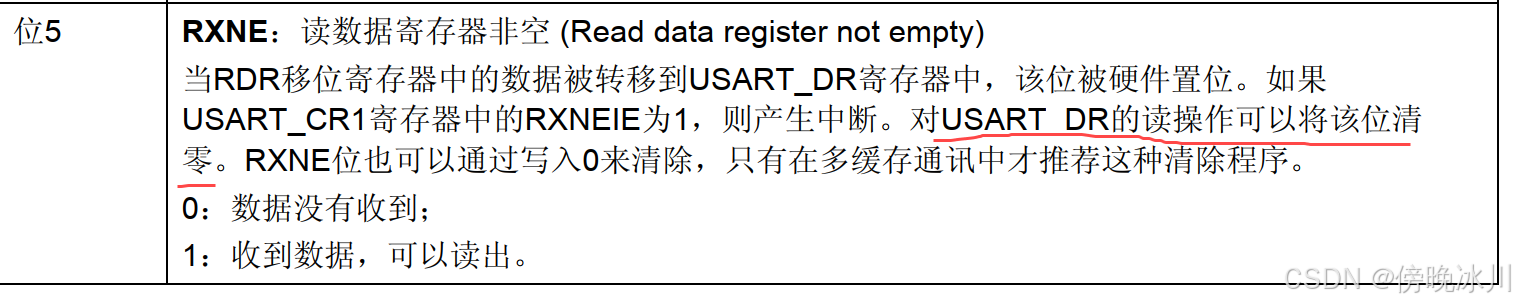
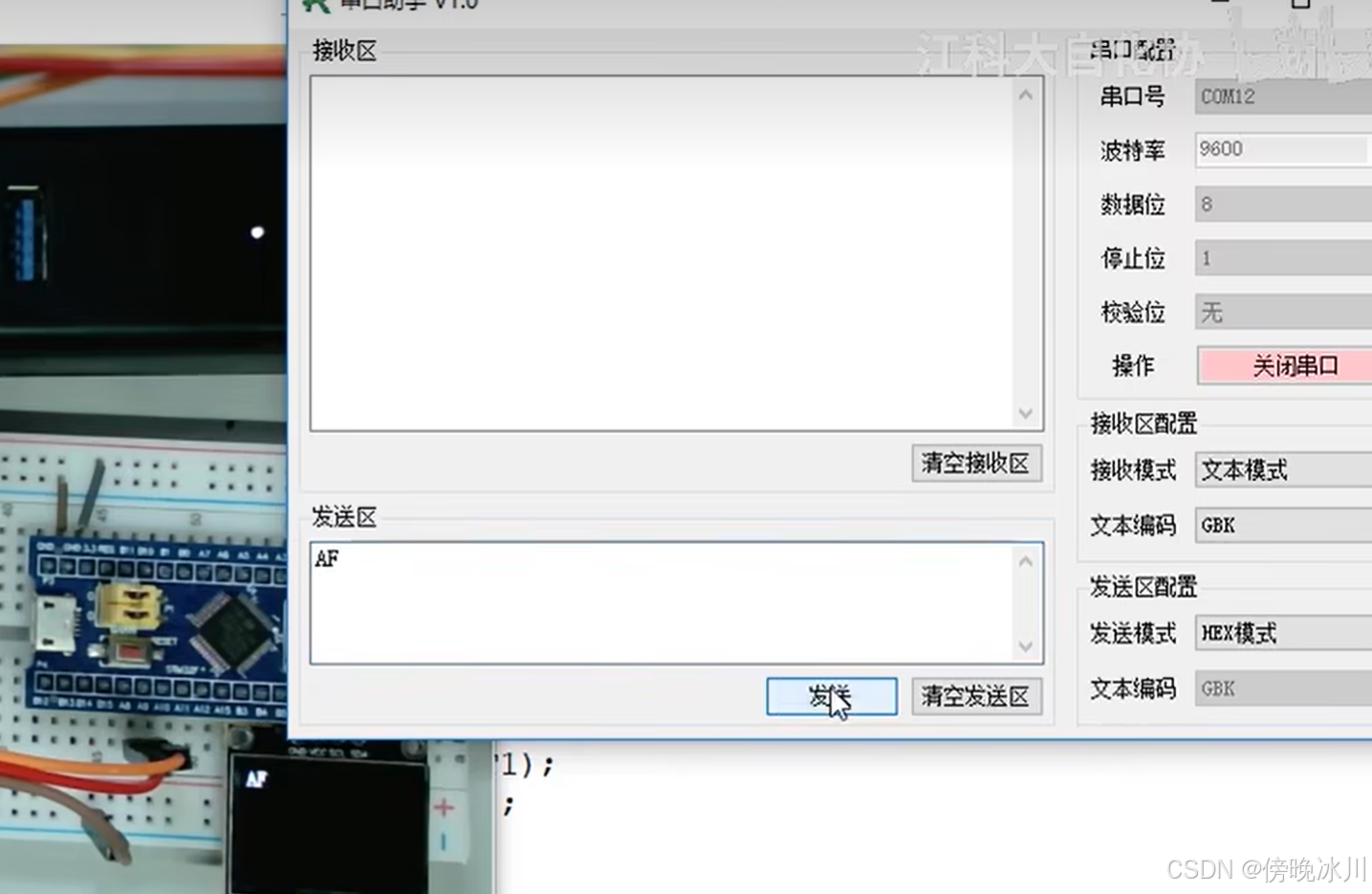
串口助手发送区发送数据,单片机接收数据
②使用中断
有关中断详细知识:[STM32] 江科大-EXTI外部中断(学习笔记-上)_江科大stm32中断笔记-CSDN博客
{STM32} 江科大学习笔记-EXTI外部中断(下)_江科大stm32exti笔记-CSDN博客
初始化函数:
具体步骤:
①RCC开启时钟,把需要用到的USART和GPIO时钟打开
② GPIO初始化,把TX配置成复用输出,RX配置成输入
③配置USART,使用一个结构体配置参数
④开启串口接收数据的中断
⑤配置NVIC为分组
⑥NVIC初始化
⑦开启USART
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*中断输出配置*/
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
}USART1中断函数:
此函数为模块函数,为方便操作,up主弄个封装秀一下
要定义两个全局变量,用于接收数据和标志位
uint8_t Serial_RxData; //定义串口接收的数据变量
uint8_t Serial_RxFlag; //定义串口接收的标志位变量
/**
* 函 数:USART1中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断
{
Serial_RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量
Serial_RxFlag = 1; //置接收标志位变量为1
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除USART1的RXNE标志位
//读取数据寄存器会自动清除此标志位
//如果已经读取了数据寄存器,也可以不执行此代码
}
}把Serial_RxData和Serial_RxFlag两个数据extern 出去也可以再main函数调用,或者像下面的方式转存再调用
串口接标志位和接收数据函数:
转存一次数据,还是对Serial_RxFlag扫描查询来接收数据
/**
* 函 数:获取串口接收标志位
* 参 数:无
* 返 回 值:串口接收标志位,范围:0~1,接收到数据后,标志位置1,读取后标志位自动清零
*/
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1) //如果标志位为1
{
Serial_RxFlag = 0;
return 1; //则返回1,并自动清零标志位
}
return 0; //如果标志位为0,则返回0
}
/**
* 函 数:获取串口接收的数据
* 参 数:无
* 返 回 值:接收的数据,范围:0~255
*/
uint8_t Serial_GetRxData(void)
{
return Serial_RxData; //返回接收的数据变量
}main函数:
uint8_t RxData; //定义用于接收串口数据的变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "RxData:");
/*串口初始化*/
Serial_Init(); //串口初始化
while (1)
{
if (Serial_GetRxFlag() == 1) //检查串口接收数据的标志位
{
RxData = Serial_GetRxData(); //获取串口接收的数据
Serial_SendByte(RxData); //串口将收到的数据回传回去,用于测试
OLED_ShowHexNum(1, 8, RxData, 2); //显示串口接收的数据
}
}
}
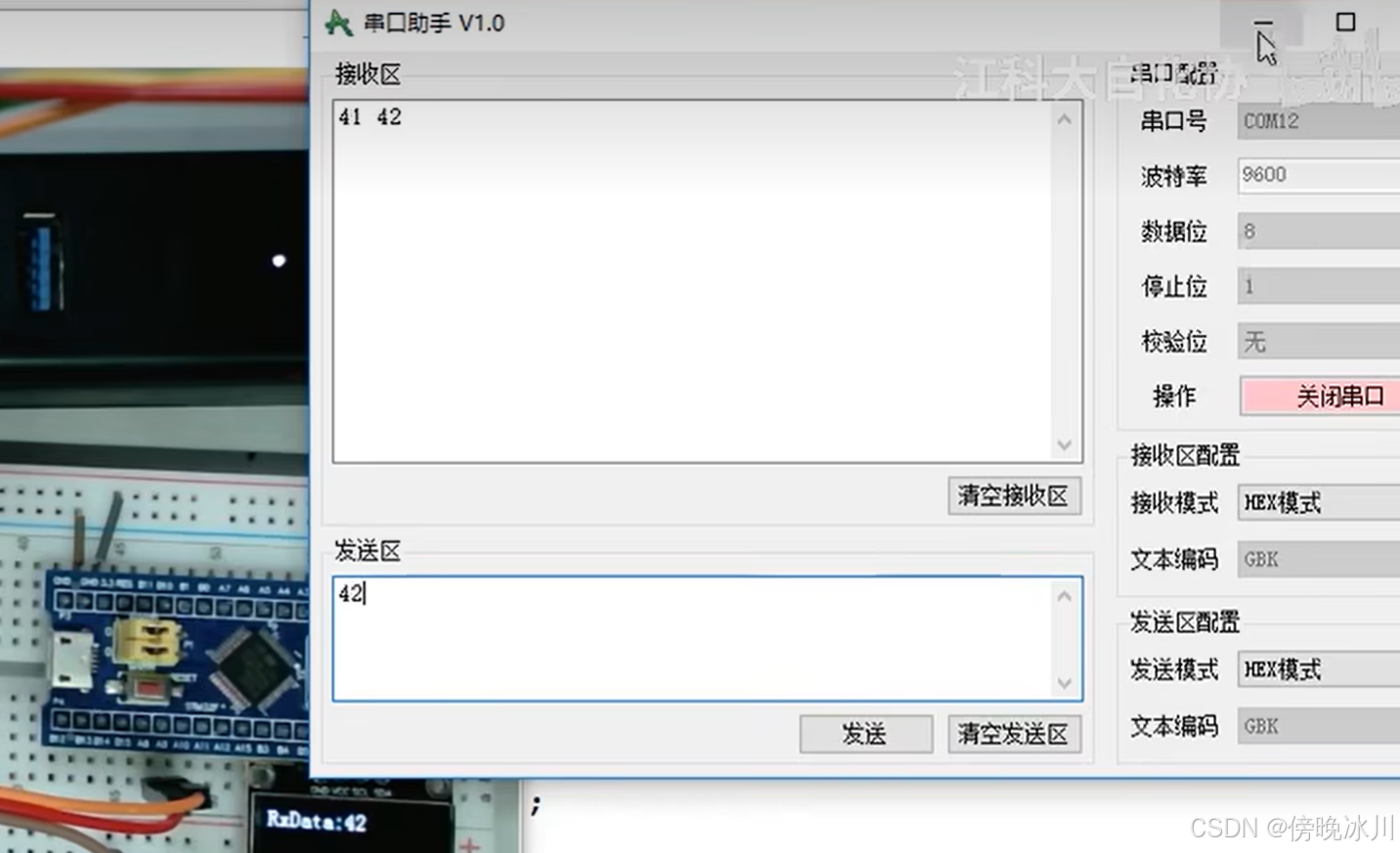
串口发送数据,单片机接收数据,同时串口回传数据给电脑

















 6360
6360

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









