







摘 要
本文是作者在研究了现代工业机器人的部分需求后进行相关设计,主要是针对新型制造技术所涉及到的工业机器人对于小轴向尺寸,高速比减速器的需求。对新兴技术进行进行相关设计。
主要根据新式超薄NGW型行星减速器进行相关设计,设计一款能满足对工件内部进行加工的新兴工业机器人的需求的减速器。
首先深入了解行星减速器功能及工作要求,然后掌握行星减速器结构设计的基本知识和设计方法,了解行星减速器的工作原理、工作过程,进行相应结构设计。然后根据行星减速器构成、工作原理、主要特点和技术指标,分析,加以论证,确定行星减速器最终方案然后进行计算。然后制作行星减速器电脑三维模型,完成各种仿真分析。然后制作行星减速器的模型,检查其运动状态,进行调试,达到足够的相似度。
关键词:新式、超薄、NGW型行星减速器、三维建模、仿真分析
1 行星减速器的结构分析
1.1 行星减速器的结构原理分析
行星减速器结构主要由太阳轮、行星轮、内齿圈、行星架、组合而成。行星减速器结构如图2.1所示。
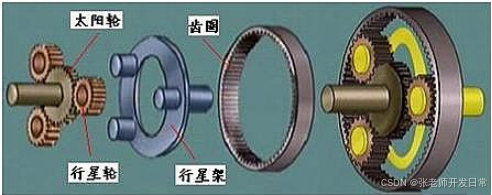
图2.1 行星减速器结构示意图
行星齿轮减速器由一个内齿圈(A)固定于外壳上,齿圈中心有一个太阳齿轮(B),两者间有一组行星齿轮组©,该组行星齿轮由行星架固定于内齿圈及太阳轮中间。当太阳齿轮有动力时,可带动行星齿轮自转,并带动行星架转动,并绕太阳轮公转由行星架带动输出轴输出动力。行星减速器齿轮传动形式如图2.2所示。
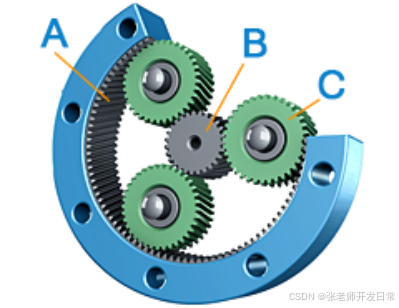
图2.2 行星减速器齿轮传动示意图
2 行星减速器级数的选择
为满足传动比高达35的需求,减速器的级数至少为2。
同时该工业机器人要求小轴向尺寸,所以应该尽可能降低减速器的级数。
综上考虑,选择减速器的级数为2。
3 传动比的分配与行星齿轮数的选择
传动比的分配:
为实现行星架嵌套安装,低速级的传动比需要至少比高速级大1,而这种分配方案会造成高速级的磨损较快,且精度下降。所以目前最常用的方案是高速级比低速级大2,然后增大高速级的齿轮模数在原有的1.5倍左右来平衡两级的磨损速度,提高高速级的制造精度,并采用斜齿轮传动。
所以选择第一级的传动比为7,第二级的传动比为5。
5×7=35,满足传动比的需要。
行星齿轮数的选择:
第一级的传动比高达7,第二级的传动比高达5。行星齿轮数不能过多。
为让行星齿轮能够均布,还要满足传动比分别高达5、7的要求,所以选择行星轮数为3。
4 计算机三维建模与仿真
4.1 行星减速器主要部件三维建模过程
4.1.1 一级太阳轮和输入轴建模过程
使用工具箱可以很方便地建立齿轮。
点击【在任务环境中绘制草图】进入草图,再点击【轮廓】绘制直线,先向上绘制一条长为15mm的线条,再向右绘制一条长为52mm的直线,再向上绘制一条长为4mm的直线,再向下绘制一条长为17mm的直线,再右下绘制一条长为5mm的直线,再绘制一条直线来封闭曲线。点击【完成草图】,选择【回转】命令来创建回转体。一级太阳轮如图5.1所示。
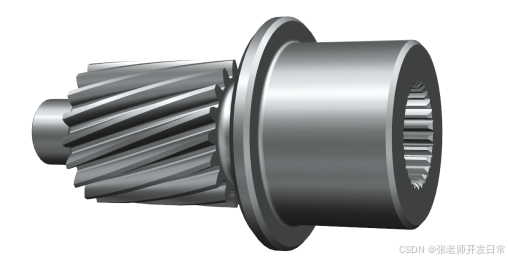
图5.1 一级太阳轮
5 一级行星轮建模过程
使用工具箱可以很方便地建立齿轮,具体参数如下图。一级行星轮齿轮参数如图5.2所示:

图5.2 一级行星轮齿轮参数
点击【在任务环境中绘制草图】进入草图,点击【轮廓】绘制直线,先向右绘制一条长为22mm的线条。
然后再绘制一条线连接两端点使草图形成封闭图形。点击【完成草图】命令退出草图。再选择顶面进行拉伸切除。一级行星轮建模完成。
5.2 行星减速器的装配
装配结构如图5.8所示。
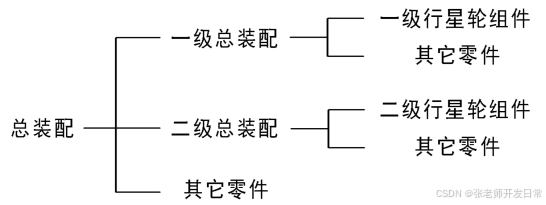
图5.8 装配结构示意图
单击【添加组件】,选择部件为壳体,位置选择绝对原点,点击确定。在底座的基础上,再对行星减速器主体部分进行装配。
单击【添加组件】,选择部件为一级总装配,激活位置选项选择通过约束,单击确定。约束类型选择接触,选择对象为壳体的侧面,单击确定。再对太阳齿轮装配,单击【添加组件】,选择部件为太阳齿轮,激活位置选项选择通过约束,单击确定。约束类型选择自动判断中心轴,选择对象分别选择太阳齿轮上的中心线和减速器箱体的中心线,再选择接触,选择对象为太阳齿轮表面和减速器箱体的上表面,单击确定。
5.3 行星减速器的运动仿真与干涉检查
5.3.1 运动仿真
单击【开始】选择运动仿真,进入运动仿真模块。打开运动导航器,在装配图名称处单击右键选择新建仿真。单击【连杆】,选择减速器箱体、内齿圈,选择固定连杆,选择应用。再选择太阳齿轮,取消选择固定连杆,然后点击应用。然后选择行星齿轮,然后点击
应用。然后选择行星架,然后点击应用。然后选择从动齿轮,然后点击应用。
然后进行运动副的设置,添加旋转副,选择连杆为主动齿轮,选择原点为主动齿轮表面的圆心,方向为垂直于平面,再选择减速器箱体为啮合连杆,选择原点为减速器箱体,方向为垂直于平面,单击应用。再选择连杆为太阳齿轮,选择原点为太阳齿轮表面的圆心,方向为垂直于平面,再选择二级减速器箱体为啮合连杆,选择原点为太阳齿轮轴表面的圆心,方向为垂直于平面,单击应用。再选择连杆为行星齿轮,选择原点为行星齿轮表面的圆心,方向为垂直于平面,再选择行星架行星齿轮轴为啮合连杆,选择原点为行星齿轮轴表面的圆心,方向为垂直于平面,单击应用。选择原点为减速器箱体表面的圆心,方向为垂直于平面,单击应用。再选择连杆为齿轮,选择原点为表面的圆心,方向为垂直于平面,再选择轴为啮合连杆,选择原点为轴表面的圆心,方向为垂直于平面,单击应用。再选择连杆为从动皮带轮,选择原点为行星齿轮,方向为垂直于平面,再选择行星齿轮轴为啮合连杆,选择原点为行星齿轮轴表面的圆心,方向为垂直于平面,单击应用。再选择连杆为行星齿轮轴,选择原点为行星齿轮轴,方向为垂直于平面,再选择壳体为啮合连杆,选择原点为壳体表面的圆心,方向为垂直于平面,单击确定。添加一个齿轮副,第一个运动副选择一级太阳齿轮,第二个运动副选择一级行星齿轮,设置比率为1.5,点击确定。
添加一个齿轮副,第一个运动副选择二级太阳齿轮,第二个运动副选择二级行星齿轮,设置比率为1.5,点击确定。
设定解算方案,单击【求解】,完成行星减速器的运动仿真。
为了使仿真效果更接近实际,添加一些现实素材使其更为真实。
5.3.2 干涉检察
编辑环境条件,这些条件会影响机构内部的运动情况。然后对运动仿真模块进行设置,设置后就定义了分析环境,然后激活捕捉分析功能。设置足够长的运动时间使模型能够运行至少一个完整的周期,待运行完成后,从分析中调出分析数据并查看结果,结果没有显示存在异常情况。
5.4 实物模型制作
因本设计结构复杂、紧凑,使用手工不易制作,故选用3D打印制作,然后装配。实物效果如图5.13所示。
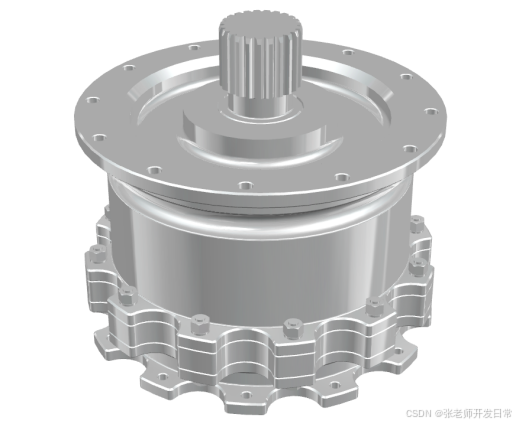
图5.13 实物效果图
6 结 论
本次毕业设计我做的是行星减速器结构设计,我成功的设计出了一款实用性的减速器。并通过软件进行分析,也证实了其结构合理性。也是对于个人能力的一个证实。
这个减速器实现了35高速比以及20KW大功率传递并拥有20CM的小尺寸,能够满足多数工业机器人的需求、拥有高精度、高硬度、高效率、高适应性、高适用性、低价格的优点。
其材料采用常见材料,易于获取和购买,结构也可采用常见的加工方式进行加工,可以做到低价,预期成本在5000元上下,可出售价在7500元上下。
其结构采用分解形式设计,方便更换已损坏的部件,降低了使用过程成本,能够带来更高的效益。

















 1127
1127

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









