







超声波是振动频率高于20KHz的机械波,它具有频率高、波长短、绕射现象小、方向性好、能够成为射线而定向传播等特点,在工业、国防、生物医学等方面有广泛应用,本篇介绍利用超声波进行测距。
1. 测距原理
超声波传感器的发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。根据计时器记录的时间t,声波在空气中的传播速度为340m/s,就可以计算出发射点距障碍物的距离s,即:s=340m/s × t / 2 。这就是所谓的时间差测距法。
2. 超声波传感器介绍
超声波传感器是将超声波信号转换成其他能量信号「通常是电信号」的传感器。HC-SR04是比较常用的超声波传感器模块,广泛应用于机器人测距、小车避障等场合。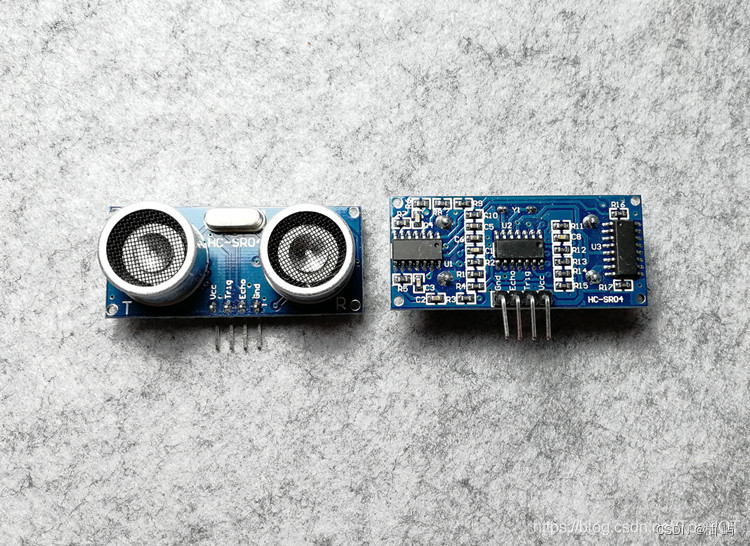
主要参数
电压:DC5V
电流:15mA
频率:40KHz
感应角度:<15度
探测距离:2cm—400cm
精度:3mm
使用说明
采用Trig引脚触发测距,给至少10us的高电平信号。
模块自动发送8个40KHz的方波,自动检测是否有信号返回。
有信号返回后,通过Echo引脚输出高电平,通过高电平持续时间获取到时间量。
3. 实验材料
Uno R3开发板
配套USB数据线
面包板及配套连接线
HC-SR04超声波传感器模块
4. 实验步骤
1. 根据原理图搭建电路图。
超声波传感器模块的VCC、GND分别连接到开发板的5V、GND。传感器的Trig引脚、Echo引脚分别连接到开发板的数字引脚2、3。
实验原理图如下图所示: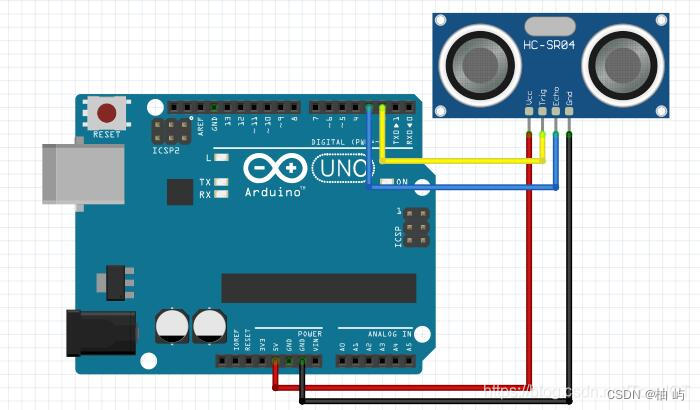
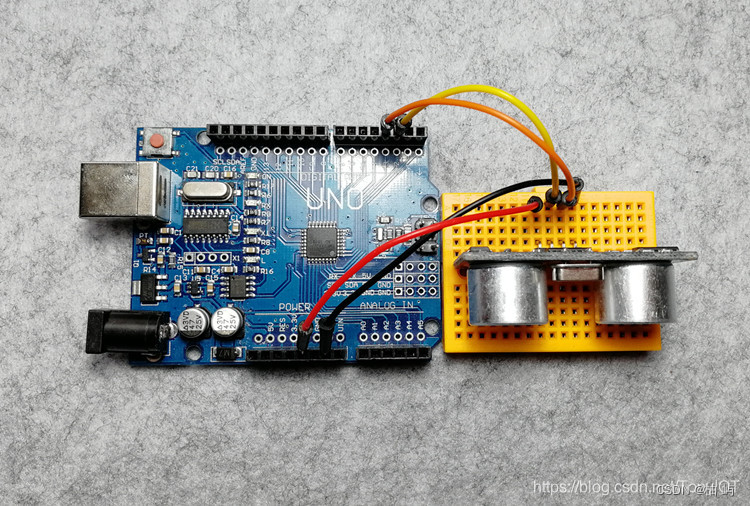
实物连接图如下图所示:
2. 新建sketch,拷贝如下代码替换自动生成的代码并进行保存。
#define TrigPin 2
#define EchoPin 3
float Value_cm;
void setup() {
Serial.begin(9600);
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT);
}
void loop() {
digitalWrite(TrigPin, LOW); //低高低电平发一个短时间脉冲去TrigPin
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
Value_cm = float( pulseIn(EchoPin, HIGH) * 17 ) / 1000;
//读取一个引脚的脉冲(HIGH或LOW)。例如,如果value是HIGH,pulseIn()会等待引脚变为HIGH,开始计时,再等待引脚变为LOW并停止计时。
//接收到的高电平的时间(us)*340m/s/2=接收到高电平的时间(us)*17000cm/1000000us = 接收到高电平的时间*17/1000(cm)
Serial.print(Value_cm);
Serial.println("cm");
delay(1000);
}
5. 实验现象
打开串口监视器,波特率设置成与程序中相一致的9600。改变超声波传感器与遮挡物的距离,监视器中将显示对应的距离。
Arduino学习交流群:672088578
更多内容,欢迎关注我的公众号。 微信扫一扫下方二维码即可关注:


















 3376
3376

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









