






今天分享的是人形机器人系列深度研究报告:《人形机器人专题:人形机器人孕育市场蓝海,减速器行业迎发展良机》。
(报告出品方:慧博智能投研)
近年来,随着工业自动化程度的提高,减速器市场需求持续增长,行业规模不断扩大。根据相关数据,全球减速器市场规模预计在未来几年内将以年复合增长率的形式继续扩大。特别是机器人、智能制造等领域的快速发展,更将为减速器行业发展注入新的活力,减速器行业将迎来发展良机。
然而就现阶段行业市场格局而言,海外品牌垄断特征显著,我国厂商距离全球龙头尚有差距,国产替代进程亟需提速。所以我们今天就继续以国产替代的视角,对减速器行业的国产替代做具体分析。我们将主要以市场讨论最为激烈的精密减速器为焦点,来对减速器行业相关问题进行梳理。当前减速器行业具体市场格局怎样?有哪些竞争壁垒制约着我国减速器行业发展?精密减速器的国产替代进程怎样?国内企业有哪些突破?相关布局公司产业发展情况如何?以及国产替代视角下,减速器行业市场空有多大?行业未来或存在哪些变局?以下我们将以此线条进行详细梳理,以尽可能全面地展现减速器行业国产替代面貌,了解行业及企业后续市场破局思路及其未来发展。
减速器分为一般传动减速器和精密减速器
减速器是连接动力源和执行机构的中间机构,起到匹配转速和传递转矩的作用。根据控制精度的要求,减速器分为一般传动减速器和精密减速器。
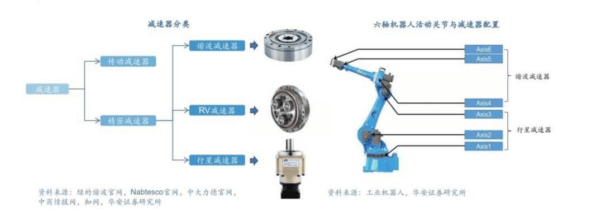
工业机器人用的精密减速器主要有三种类型。一般传动减速器通常用于满足基本的动力传输需求,其控制精度较低。工业机器人用的精密减速器主要有三种类型分别为谐波减速器、RV减速器、行星减速器。
精密减速器的性能直接决定机器人的整体性能水平。精密减速器是工业机器人最重要的基础部件,直接关系到机器人的反应速度和功能实现精度。工业机器人主要使用的精密减速器有谐波和RV两种。由于体积小巧,承载能力相对较低,谐波减速器主要用于腕部、手部和小等执行机构的末端位置。相比之下,由于RV减速器的体积、质量较大但稳定性强,并拥有更大的承载能力,它通常应用于基座、肩膀大臂等部位。对于一个拥有六个关节的机器人来说,关节A1-A3通常采用RV减速器,而末端执行关节A4-A6则主要选用谐波减速器。移动机器人的轮部可使用精密行星减速器。
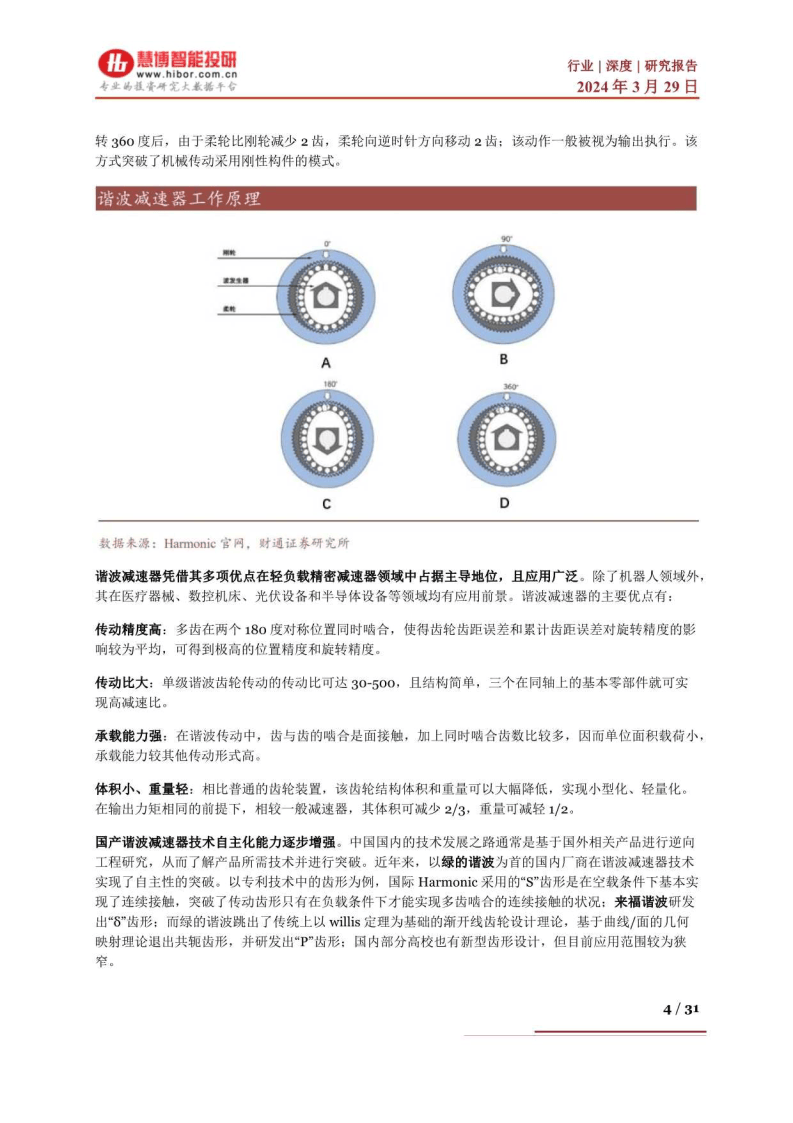
谐波减速器是一种基于圆柱弹性壳体理论的新型齿轮传动。它通常由柔轮(Flexspline)、刚轮(Circular Spline)和波发生器(Wave Generator)三个主要构件组成。谐波减速器的工作原理是通过柔轮的周期性波动变形,迫使柔轮与刚轮之间的少齿差内合,从而实现动力和运动的传递。由于柔轮和刚轮的齿数之间的差距很小,因此可以获得大的传动比。谐波减速器相对于传统减速器具有多个优点。它已从最初的航天航空装备领域迅速扩展到其他领域,包括仪器仪表、机床、仿生学(机械手、机器人、假肢)、医疗器械、能源、光学系统和原子反应堆等。这种广泛的应用领域使得谐波减速器成为一种非常有价值的传动装置。
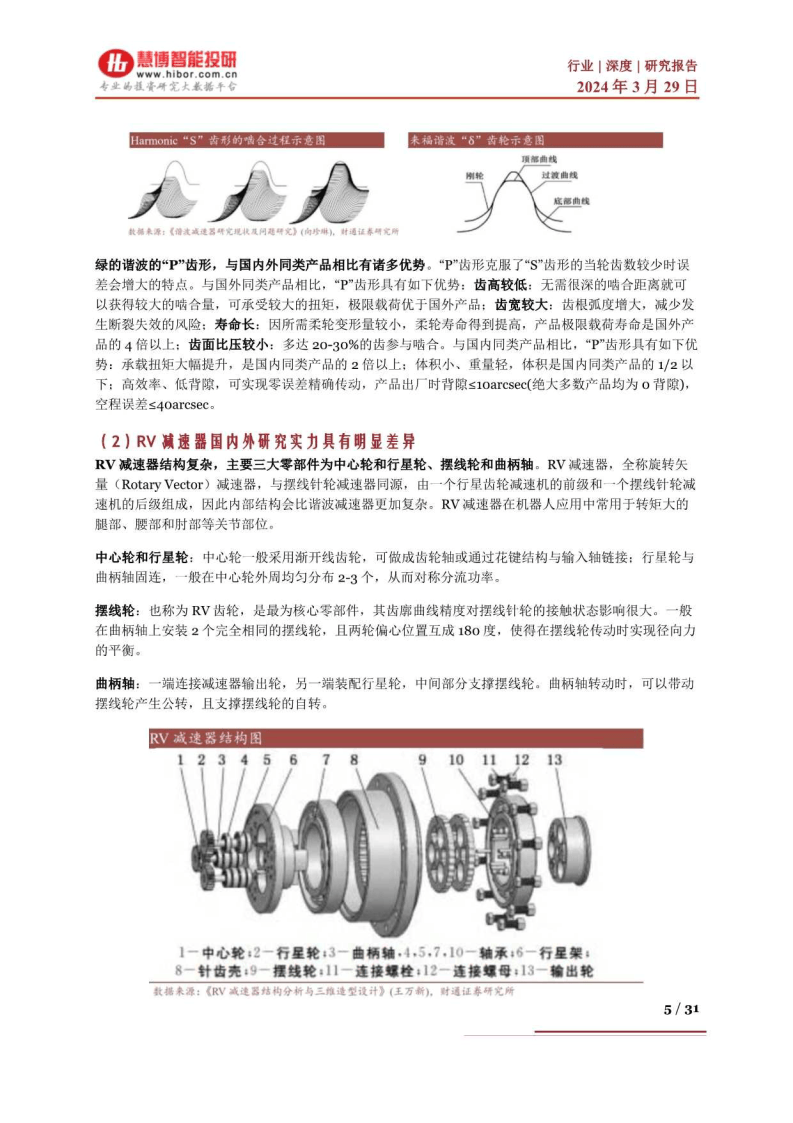
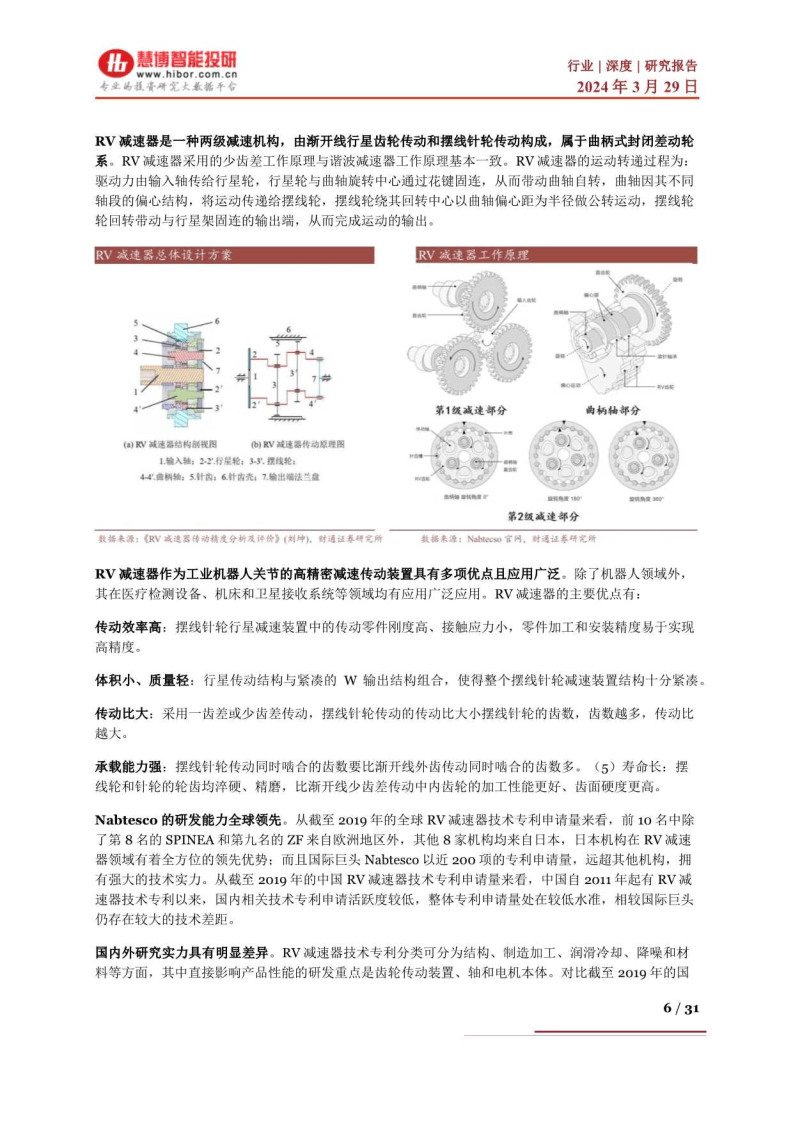
RV(rotate vector)减速器是由摆线针轮行星减速器发展而来,主要由第一级渐开线圆柱齿轮行星减速机构和第二级摆线针轮行星减速机构两个部分构成。比摆线行星减速器具有更紧凑的结构设计和更优越的使用性能以及更高的传动精度,被广泛用于机器人、医疗和军事等工程领域,尤其在机器人领域RV减速器占有越来越大的比重。与机器人关节常用的谐波减速器相比,RV精密减速器具有很高的疲劳强度、刚度和寿命,最大的特点是回差精度稳定,不会像谐波减速那样随着使用时间的增加运动精度会显著降低,因此满足类似机器人关节等对运动精度要求长期稳定的传动场合。现今世界上大部分国家高精度的机器人传动多采用RV减速器作为关键零部件。随着机器人技术的发展,RV精密减速器已成为现代机器人关键技术之一,对于机器人的性能具有重要影响。
精密行星减速器是一种紧凑的减速装置,由行星轮、太阳轮和内齿圈组成。其结构相对简单,传动比通常在10以内,减速级数一般不超过3级。在精密行星减速器的运行过程中,一个太阳轮通常会驱动3个行星轮绕行星轴旋转,这使得它的体积小、质量轻,启动更加平稳。此外,精密行星减速器具有卓越的刚性、高精度和高扭矩传递能力。精密行星减速器主要应用于步进电机和伺服电机,用于减小转速并提高扭矩输出。这种减速器广泛应用于工业机器人、精密机床、医疗设备等领域。



报告来源/公众号:【海选智库】
本文仅供参考,不代表我们的任何建议。海选智库整理分享的资料仅推荐阅读,如需使用请参阅报告原文。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









