






如题,在今天学习线性代数时,觉得书上对于施密特正交化部分的解释还不够明了(作者用的是同济版的线性代数,对于农科学生来说可能不够明了),于是就想到能不能用通俗易懂的方法把这个知识呈现出来,于是就有了这篇文章,话不多说,直接进入正题
一.施密特正交化
设 是向量空间
的一个基,要求
的一个标准正交基。这也就是要找一组两两正交的单位向量
与
等价。这样一个问题,称为把基
标准正交化。
我们可以用以下方法把 标准正交化:取
然后把它们单位化,即取
就是 的一个标准正交基。
上述从线性无关向量组 导出正交向量组
的过程称为施密特正交化。
二.“通俗”理解施密特正交化
在开始之前,默认你已经知道了内积等学习施密特正交化需要的一些基本知识
我知道,定义总是晦涩难懂的,想要通俗的理解就要从别的角度去思考,而对人类来说,图形恰恰是理解记忆的好方式,下面我将以数形结合的方式来带你了解这个定理。
余弦定理与向量距离
在平面直角坐标系中,假设有向量 ,如图(懒得作图了,顺便展示一下子画工)
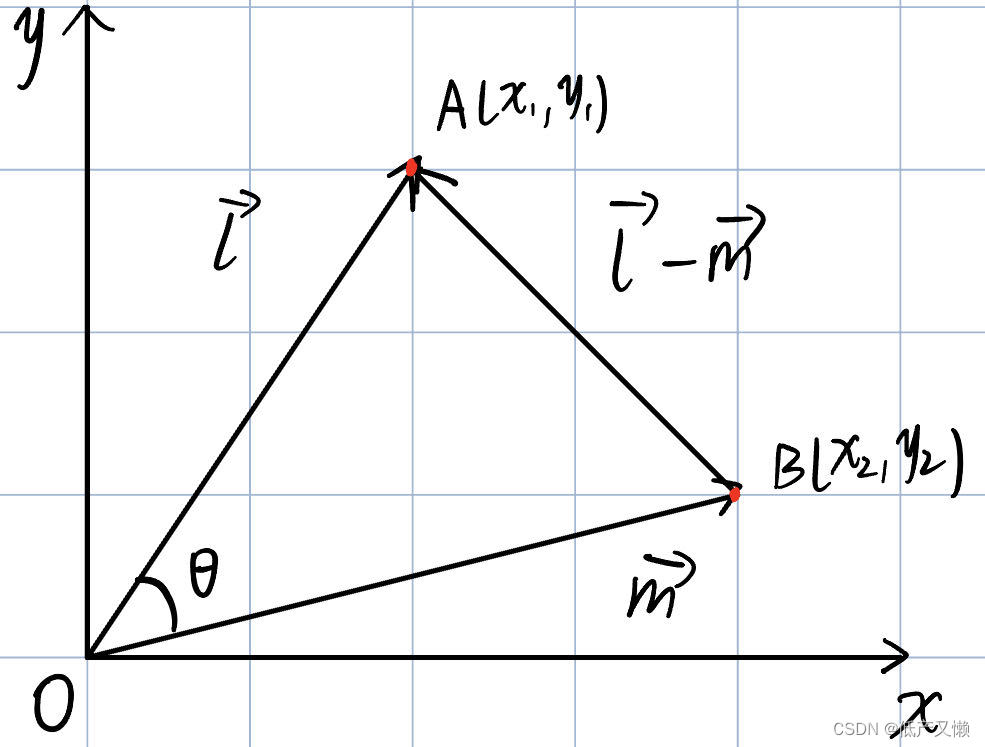
在这三角形AOC中,对A,B距离的平方,有
余弦定理:
坐标:
显然,两式中后一项相等
即,向量的内积为
正文
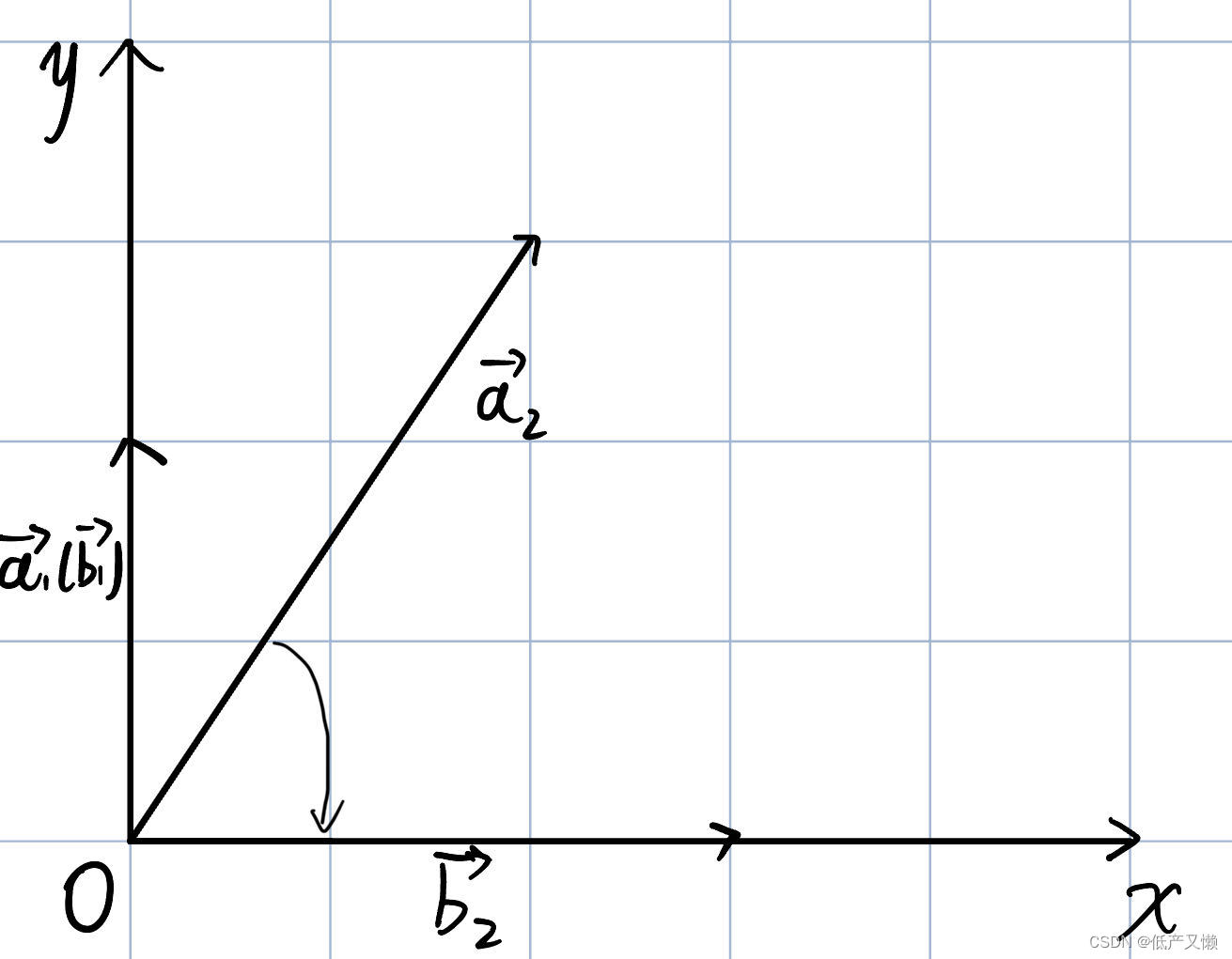
现在,回到公式中,我们不妨把问题简化一下,假设向量空间是二维空间
设在二维空间中,有正交向量 ,任意向量
,由正交向量性质可知,一对正交向量必然共面且垂直,而平面直角坐标系的坐标轴恰恰具有这个性质,那么由
,不妨建在
所在的平面建立平面直角坐标系,并设任意向量
与y轴重合,如图:

回到施密特正交化的目的,其意义就是将一组任意向量通过初等变换化为正交向量,而向量的初等变换正是向量在直角坐标系中的坐标变换,
即,其目的就是(二维平面)将一对向量,使其中一个向量与x或y轴重合,另一向量通过变换使其与另一坐标轴重合,这样就达到了正交化
明白了其中的原理之后,我们再回到式子中,来看看如何理解这冗杂的东西
还是在二维平面中,有
第一个式子不做过多解释,正是前文所提的“设任意向量与y轴重合”的情况
我们来仔细研究第二个式子,首先将式子写为
其中 ,为常数
不难发现,式子右侧部分的几何意义如下图:
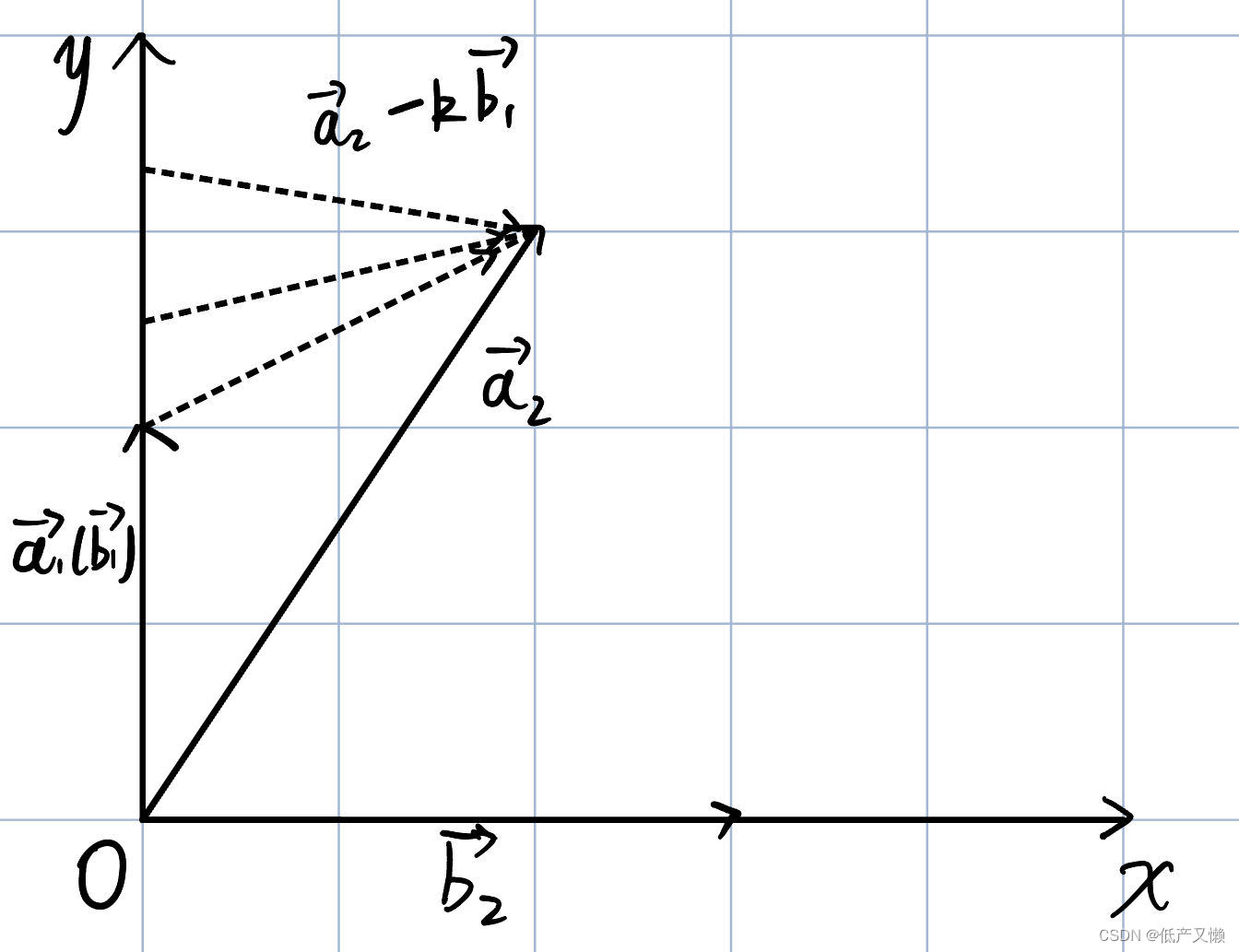
显然 的作用就是找到一个合适的向量
使之与x轴平行
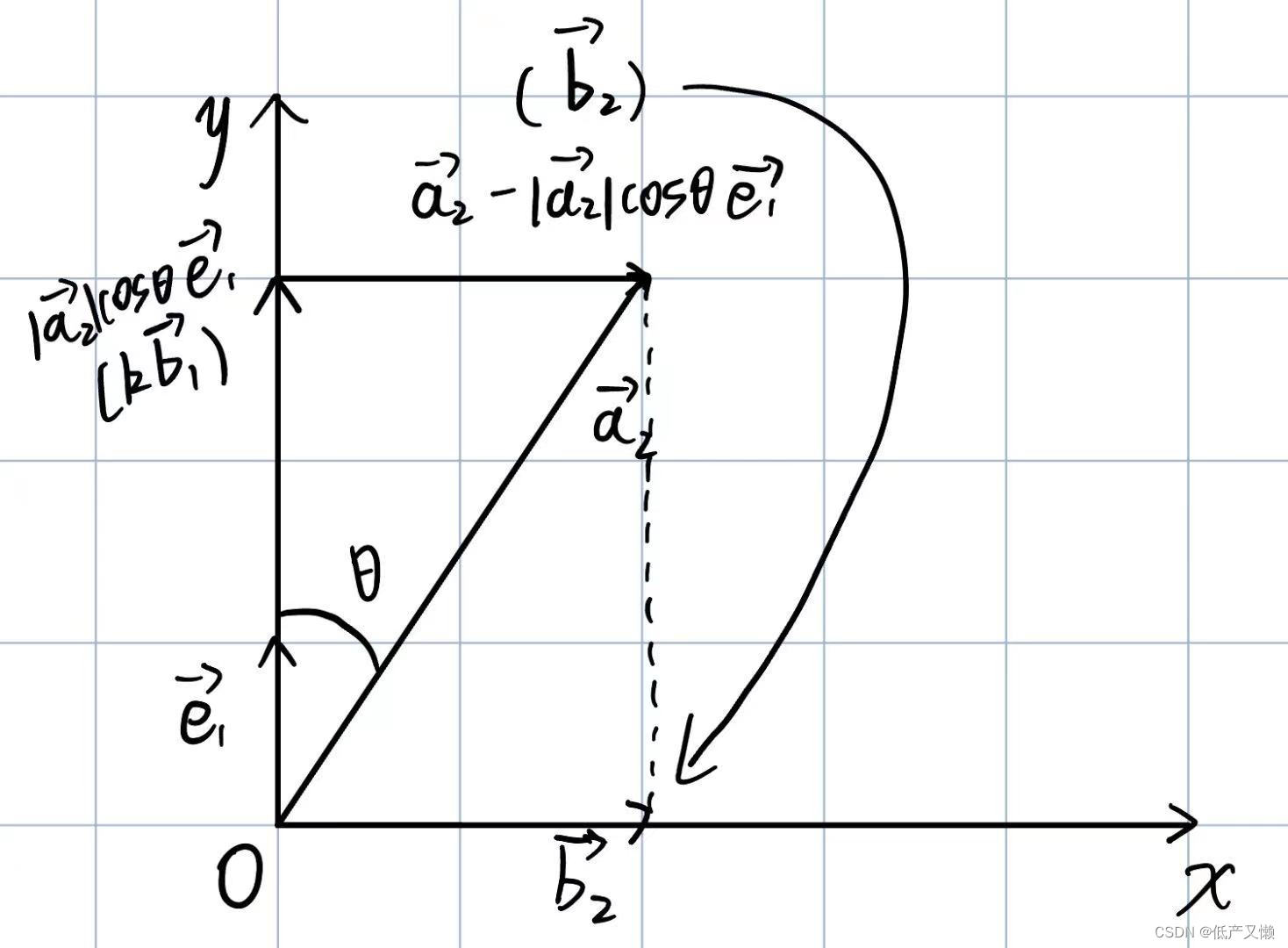
现在我们来研究系数 的意义
由上文中通过两向量推到的公式:
结合一些简单的变形,不难得到
其中 则为单位化后的
,即与
共线的单位向量
则 的表达式为
其实到这里就已经很明显了, 的意义就是先将
单位化,再将其长度化为与向量
在y轴上的投影等长,这样就解释了为什么
可以将
放缩到合适的长度,使得
使之与x轴平行。
至此,在二维平面上的施密特变换就已经完毕
在三维平面时规律也是如此,你可以把它通俗的理解为有一个鸡爪子,如果选定了一个脚趾作为“参考”,那么正交化鸡爪子的过程就是将另外一个掰到与参考脚趾垂直,将最后一个掰到与前面两个垂直
如若上升到n维,作者暂时还没想好怎样通俗理解,目前就当作二维的推广来记忆即可,如果有更好的通俗易懂的方法,欢迎评论交流!
ps:作者数学不是很好,可能有些部分不严谨,敬请指正!


















 2383
2383

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











