






# 因前阵子有点忙忘更了。
今天来更新关于无人驾驶技能主题竞赛的机器人搭建。
这期赛事要求可以看我前几期的分享
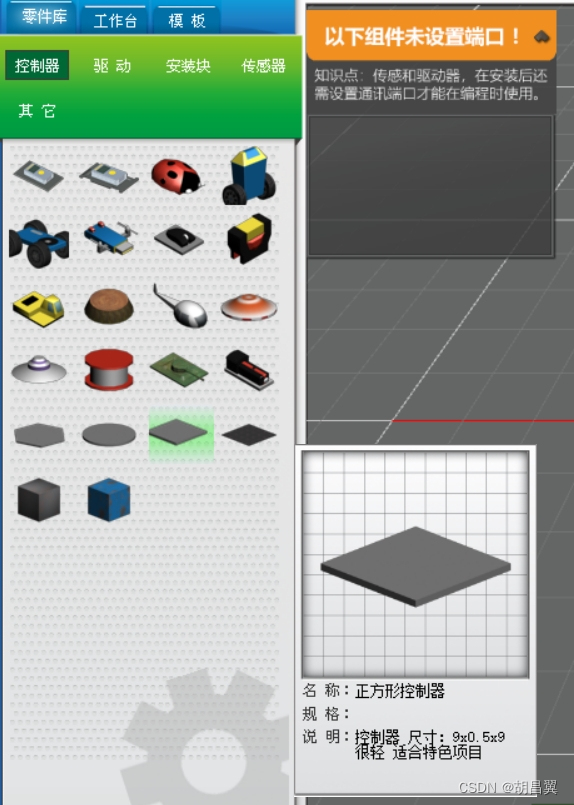
控制器的选择
对于机器人开局就需要去载物,那么选择的控制器也是为载物方便以及机器人运行的稳定这方面着想。(我选择的是下图的正方形控制器)
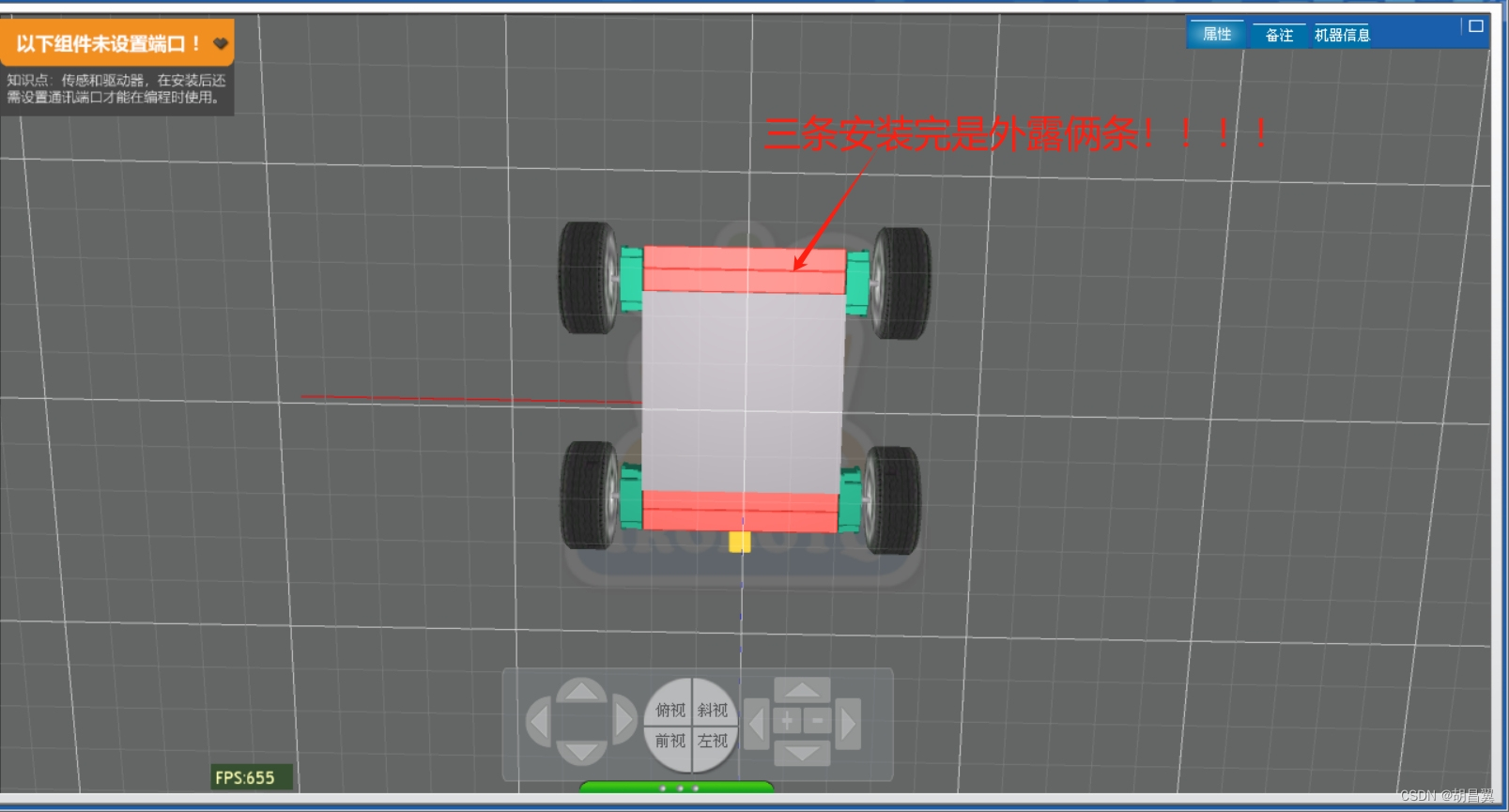
车轮与直流电机
车轮的选择也是很重要的,以及对于直流电机的选择#看下图(之前因为车轮选择错误,导致飞车和走中间总是不稳定)

传感器介绍
那么这个时候,最简单的车具备的东西都有了,要让它上公路的话,一些传感器是必备的,像距离传感器,灰度传感器,光线传感器,红外线传感器(这期赛事不涉及不讲)等等
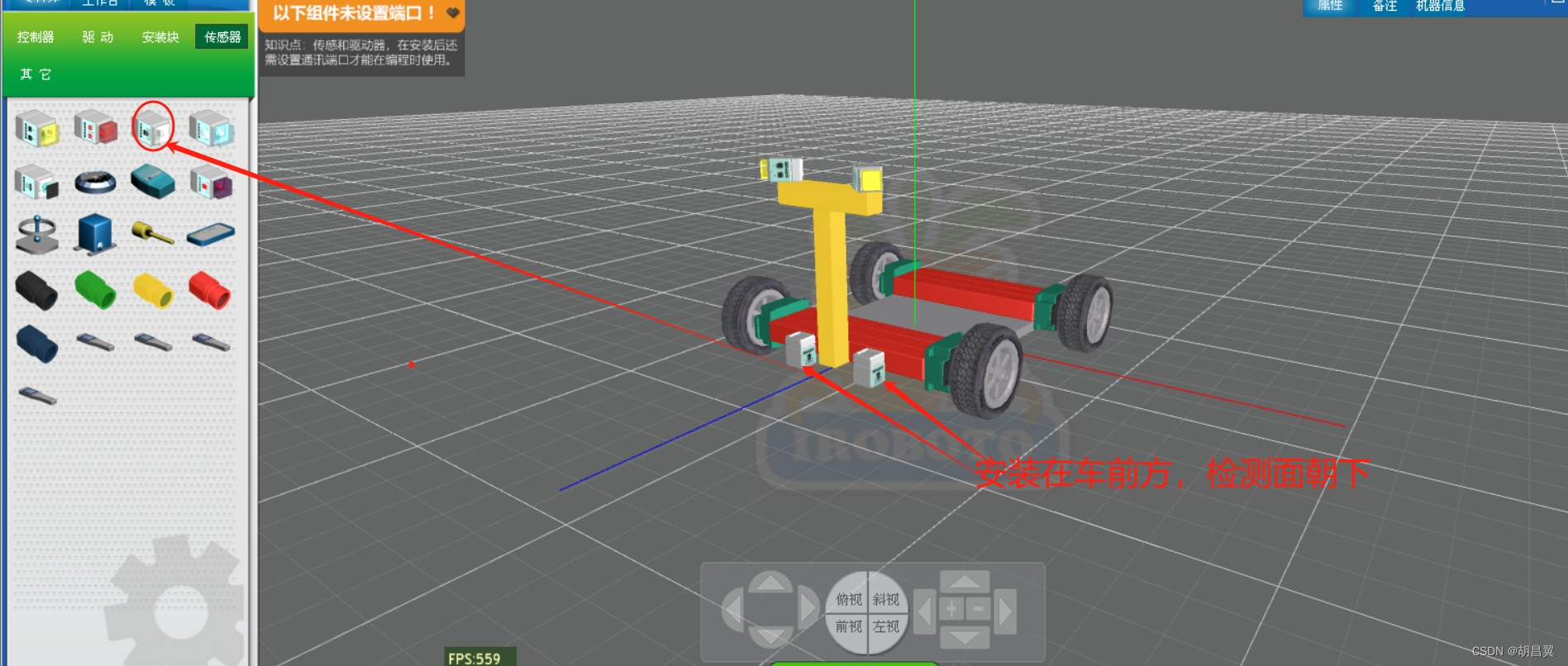
那么先来讲讲距离传感器的作用以及安装在哪里,偏转的角度问题呀(看下图)
底下安装完如图所示
灰度传感器的作用是检测飞车前路段的灰度值以及斑马线的灰度值,检测到时可以加速飞车和斑马线停,安装如图所示
光线传感器就是检测红绿灯,使它红灯停,绿灯行,遵守交通规则,安装如图所示
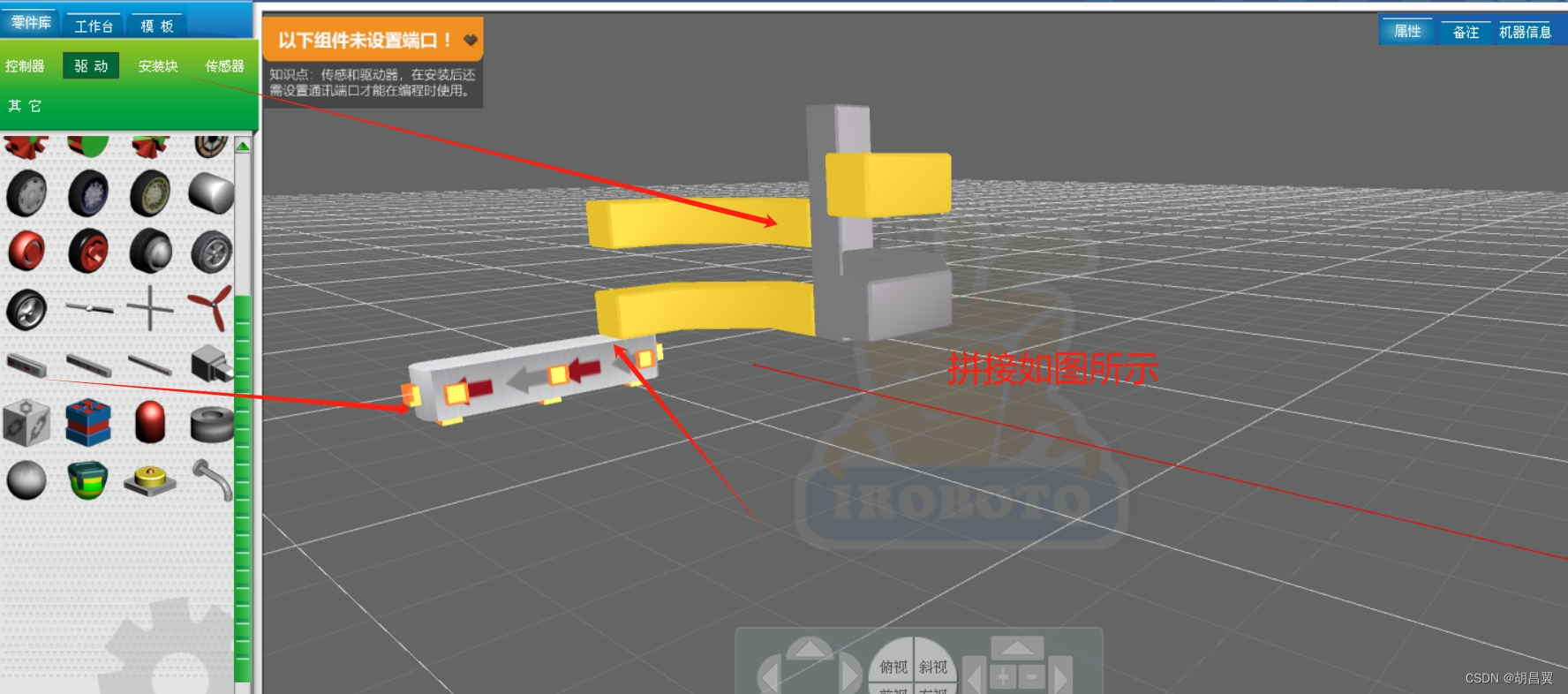
滑杆与安装块
对于所需的传感器讲解完毕,那么在颠簸的路面要怎么将物体牢牢困在我们车的重心位置呢?
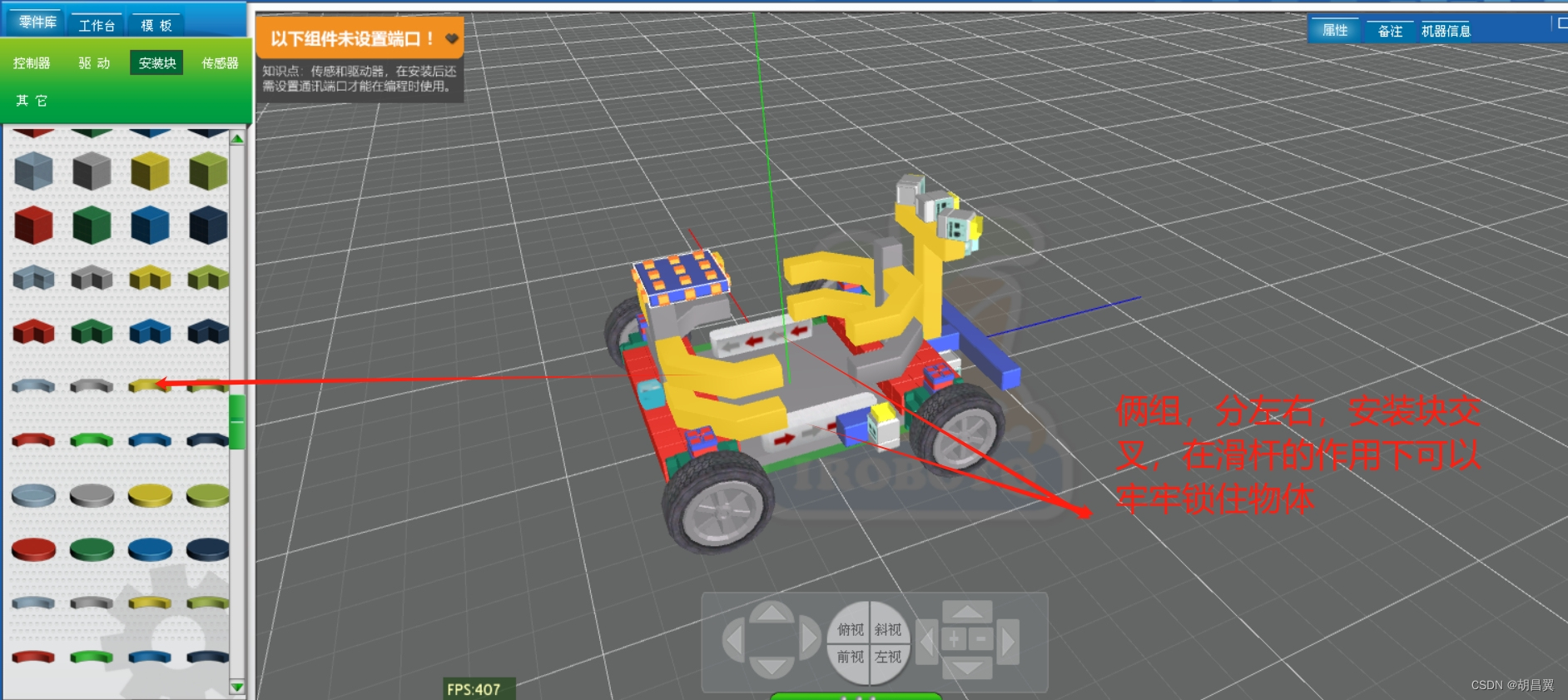
我采用的是滑杆和安装块的巧妙结合,可以使物体牢牢锁在车的重心位置,如图所示
车的构造如下图所示
细节部分
那么这个时候会有人有疑问了,为什么前面俩距离传感器了,中间还要再来一个呢,车中间也有一个,还有在那四个直流电机上的是什么?
1·前面的距离传感器可以配合灰度传感器用于飞车
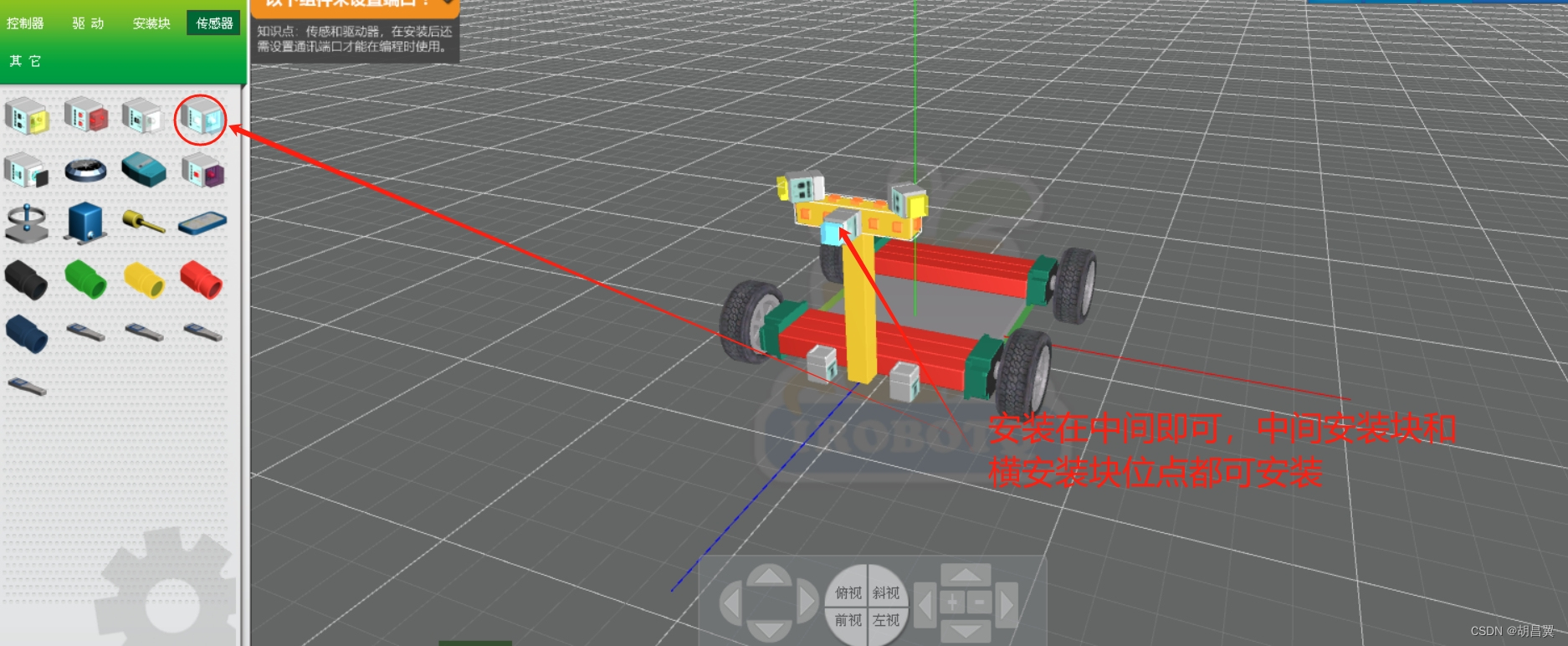
2·车中间的那个距离传感器的作用是我们在接收货物时会用到的,如下图所示
3·在直流电机上的是弹射装置————作用是用来向下施加一个力去压住车,我们在后期慢慢调试提高速度车头会翘,压住就不会翘

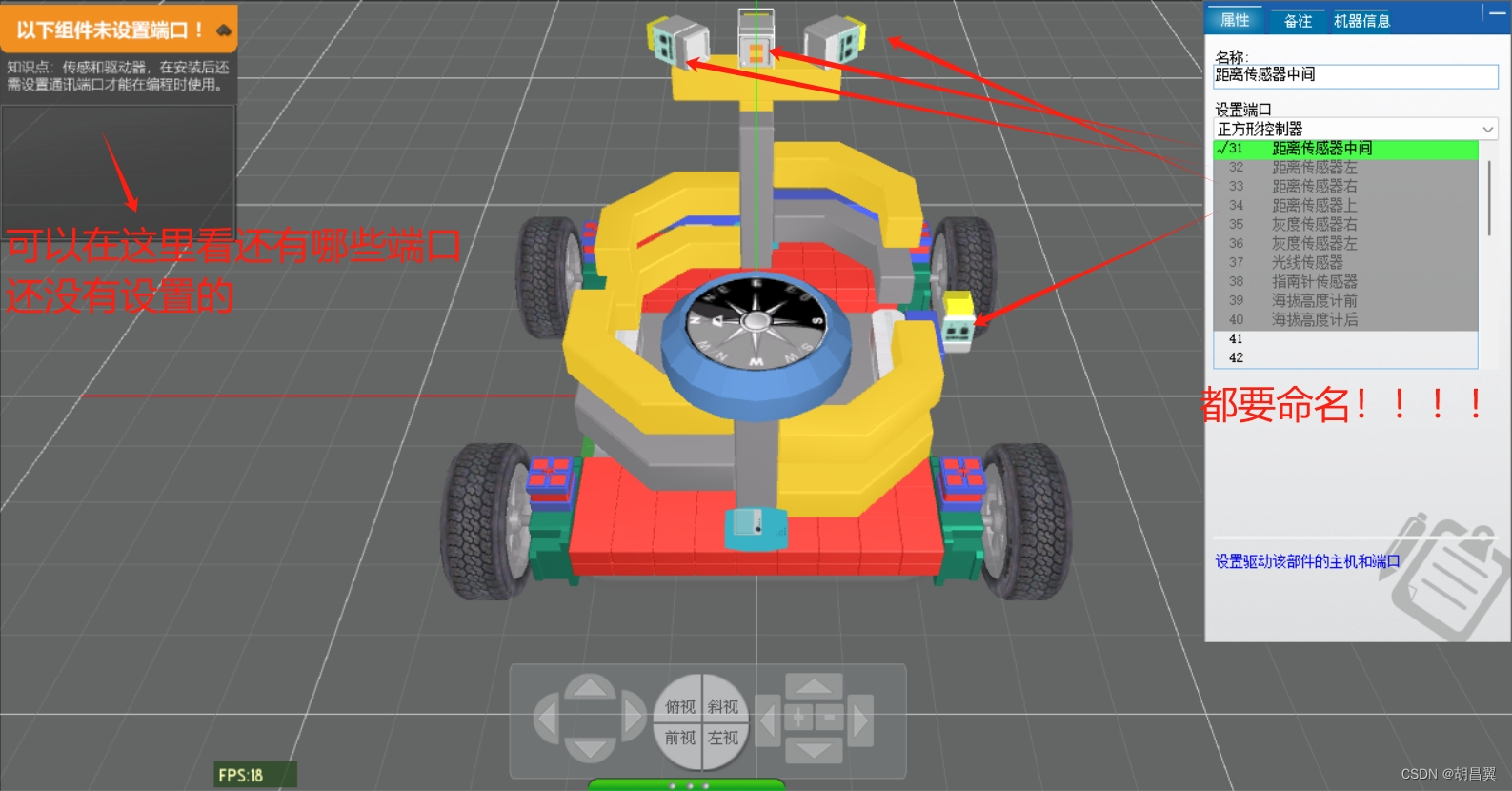
小重点
还有需要注意的!!!!!
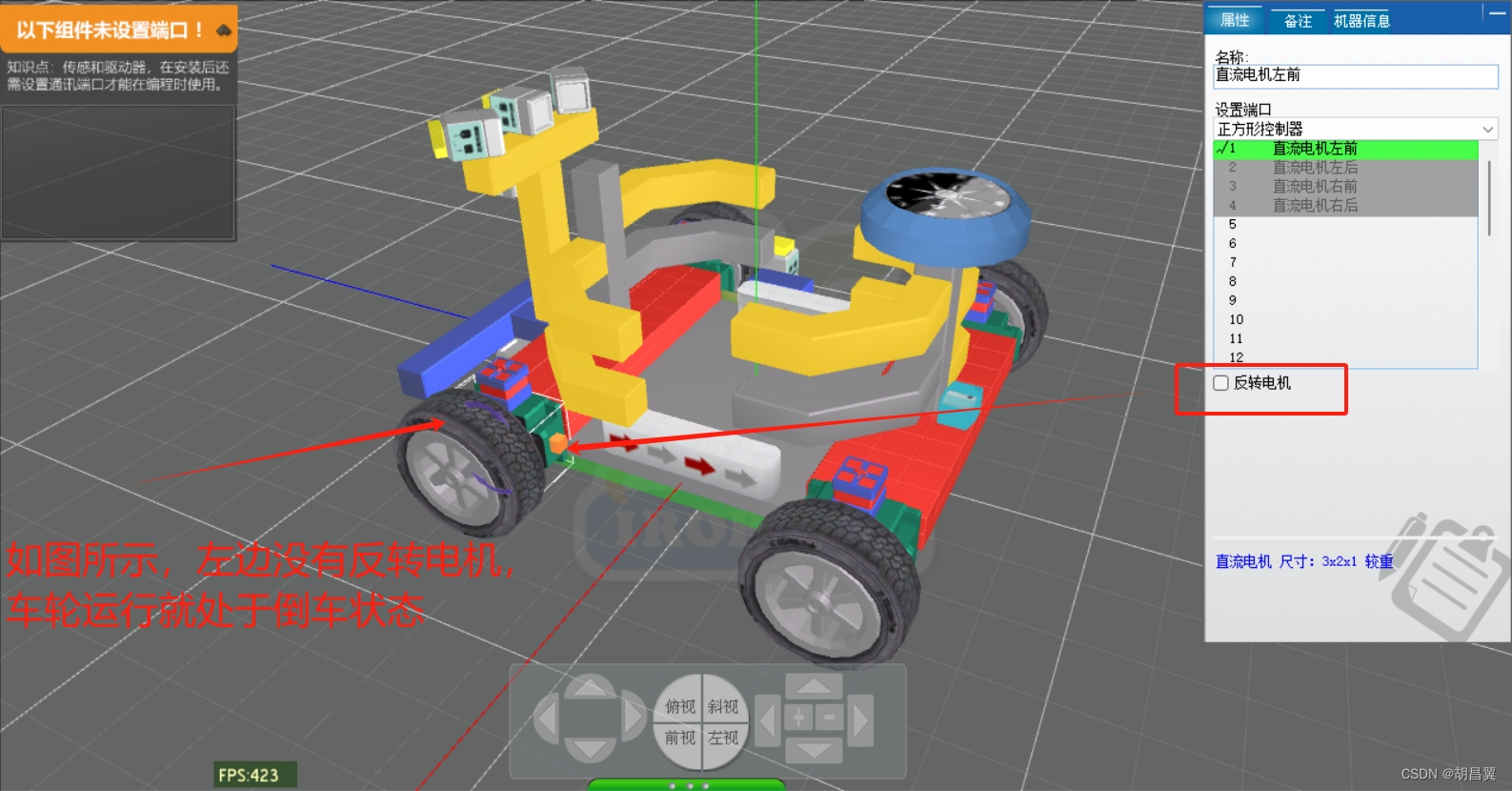
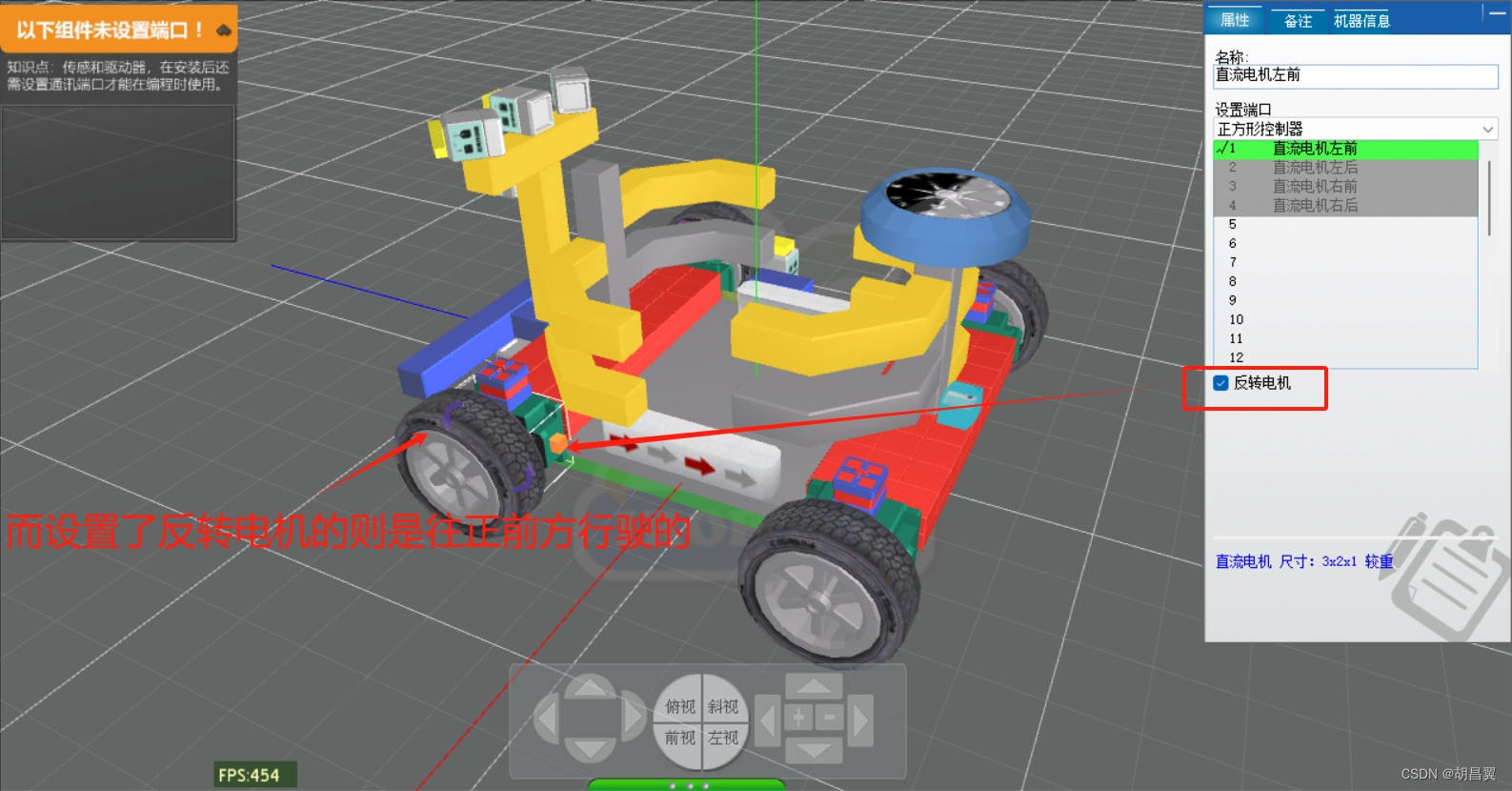
不是将它们安装上去就好,还要设置端口如图所示
以及要对电机,传感器命名,方便后续编写程序,知道这个电机是哪个位置的电机,是左距离传感器还是右,是前中距离传感器还是车中间传感器呢?
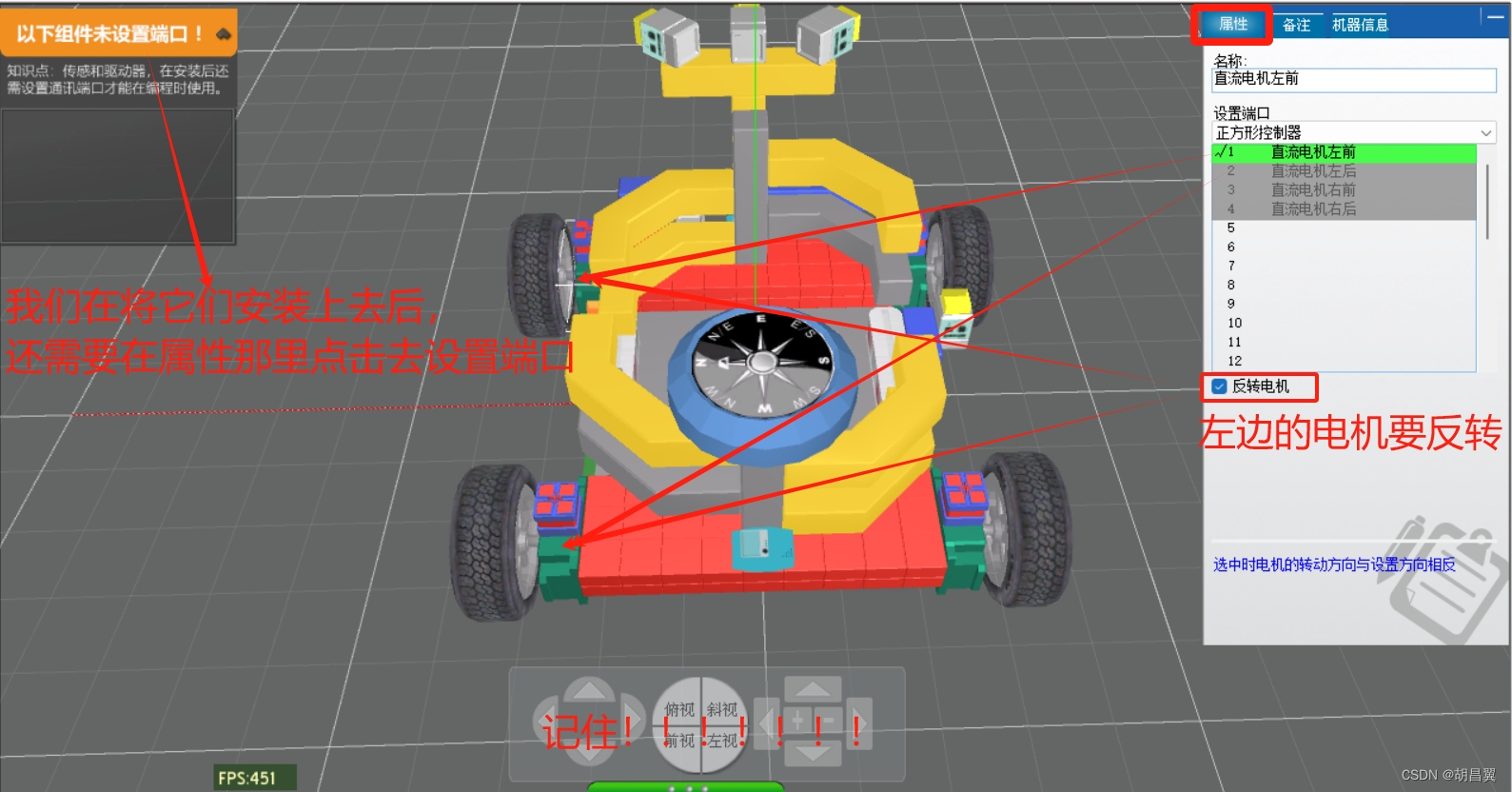
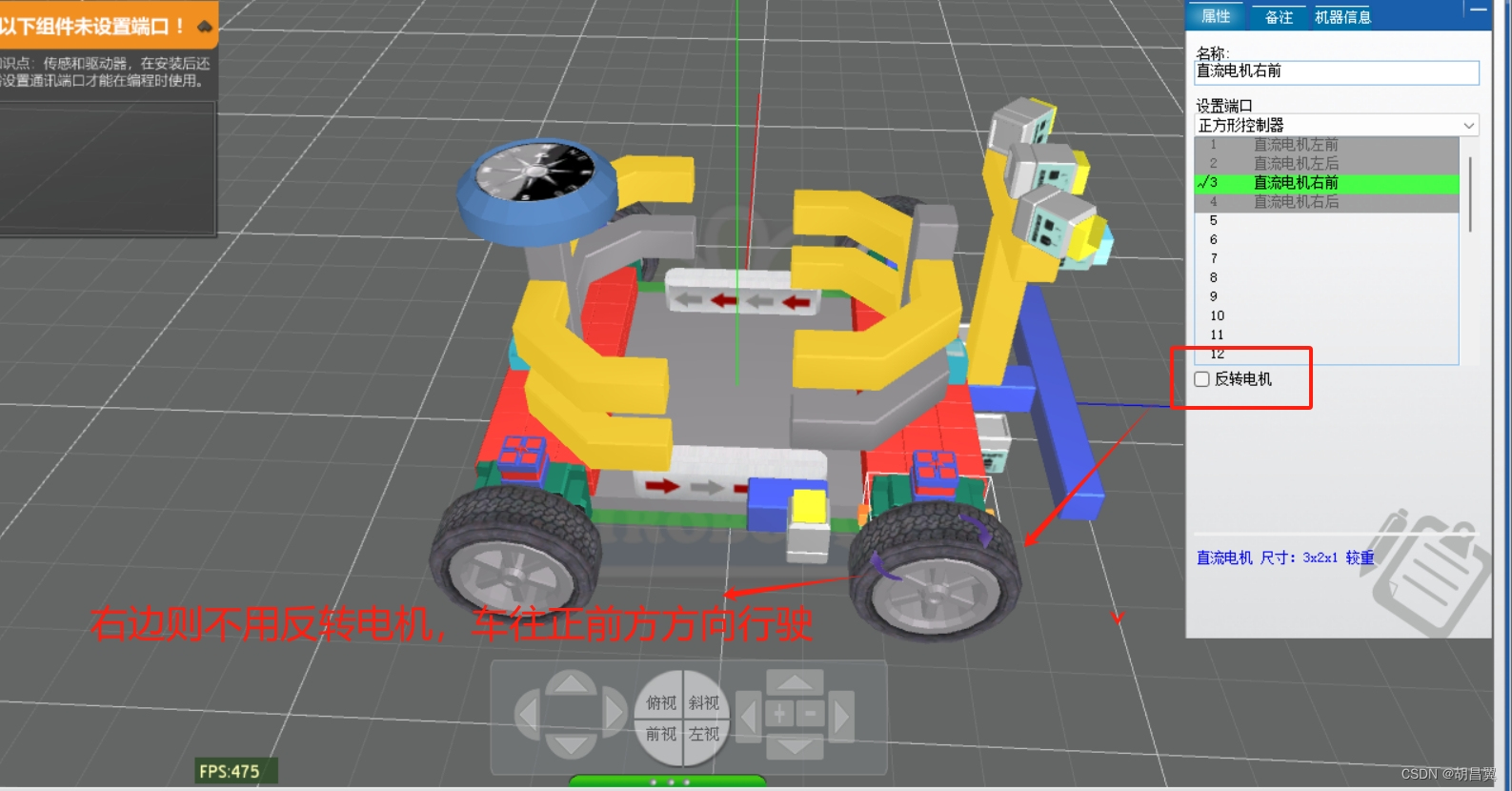
!!!!左边的直流电机一定要反转电机,左边的转向和右边是不一样的,如下图所示
弄完这些记得检查一下,车就这样搭建好了,是不是很简单呀,快去试试吧
有问题评论区问~
下期更新程序的设计以及思路~~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









