






无人驾驶技能主题竞赛规则
一、竞赛任务
任务要求在拟离的三维城市环境中,设计一套机器人系统并模报实现各类无人驾驶交通行为,全程无人工干预自主运行完成各类安全行车和技能挑战动作。
竞赛中,选手需幸握机器人和关知识和技能的综合运用,并能在约定的规则和有限的时间内,针对具有较高前暗性、复杂度的综合性任务,临场规划设计高效的问题解决方案.
二、竞赛场景
在竞赛场景中的城市道路由行车道、交叉路口,道路围栏、车、路口信号灯、道路标线、路面减速带等各种模拟元素构成。
竞赛场景虚拟城市环境中的物体有各自的物理属性,参赛选手在设计机器人时需考虑应对。
资赛三维场景图示

三,任务规则
(一)行道路线
要求机器人从起点出发。途中行进路线可由选手结合任务要水自主规划。终点信息包含明显可见的标记和GPS坐标。
(二)竞赛任务变化因素
任务场景中的以下元素可能会产生变化:
1.起始点、终点的位置和制向:
2.道路上车辆的数量,位置及行进行速度;
3.信号灯控制路口的数量和位置及信号灯时长;
4.飞车路段的数量和位置;
5.路面减速带的位置、数量、大小:
6.各交叉路口可能会出现数量不等的道路隔离栏杆;
7.负载货物的尺寸和重量;
各变化因素将在每次竞赛开始后临场公布,并在当次比赛过程中保持不变。
(三)竞赛任务中止
任务完成过程中发生以下情况。将导致届次任务的终止:
1.耀过任务限时;
2.机器人脱离道路;
3.机器人周红灯;
4.任务过程中机器人尺寸超出限制;
5.选手自主抽束任务;
任务中止后,选手可选择是否提交当次任务的威绩。
(四)任务相关时间
1.竞赛时长:指竞赛的整个过程的时长,选于需在此时长内完成搭建机器人、编写程序及完成任务等所有操作。本次比赛各组则竞赛时长为120分钟。
2.任务限时:指机器人从起点出发到达终点可用的最长时间,各组别的任务限时分别如下:
小学姐:160秒;
初中组:140秒;
高中组:120秒;
3.任务耗时:指机器人从起点出发到达终点实际所用的时间。
(五)机器人规格要求
选手设计的机器人应符合以下规格:
1.机器人的直径任何时候不能超过10米,具体尺寸以系统的计算堵果为准。
2.机器人的所有部件的数量不得超过100个。
(六)任务得分
任务得分的计算方法为:任务得分-基础分+附加分。时间奖励分,各组成部分说明如下:
1.基础分:机器人在任务限时内到达终点可获得基础分100分。
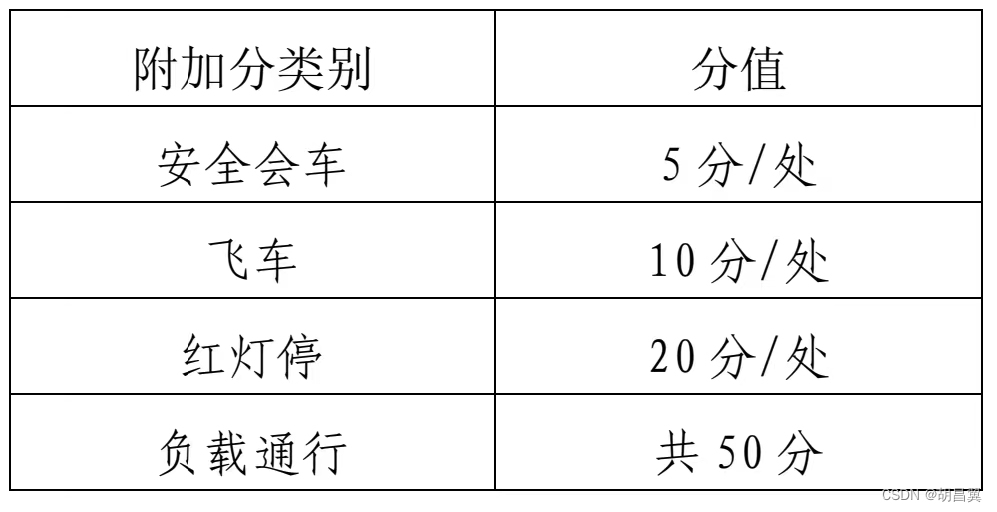
2.附加分:在任务过程中有多种可获得附加分的附加任务,包括:安全会车、飞车、红灯件、黄载通行,各附加分的分值如下表:
3.时间奖励分:机器人在任务限时内到达终点时可获得时间实励分,其计算方法为:
时间奖励分=(任务限时-任务耗时)(单位秒) x 1分。
(七)附加任务及得分说明
1.安全会车:在道路上会出现正在道路上行驶或临时停靠的车辆,机器人通过该路段时未接触则该车辆并安全交会后,可获安全会车得分,无论机器人当次是否获得安全会车得分,再次通过时均不会再得分。
安全会车图示

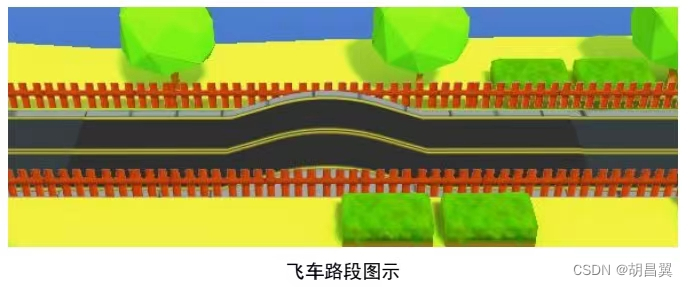
2.飞车:在道路中有明显标记的带装路段,机器人经过此路段时,能整体腾飞并在空中滑行超过2米并驶出此路段后,可获得飞车得分,此任务旨在考察机器人系统在极端环境下的结构和算法稳定性、飞车距离从机器人整体离开路面时为起点。机器人任何一部分再次接触路面时为终点进行计算,无论机器人当次通过此路段是否获得飞车得分,再次通过时均不会再得分。
飞车路段图示
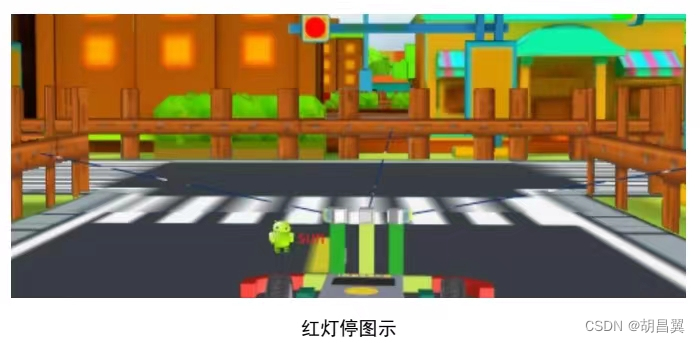
3.红灯停:在部分道路交叉路口,可能合建有路口信号指示灯,机器人在计划通过此类路口前,策判别当前路口信号灯状态,如遇指示为红灯则不得进入路口区域,等待红灯熄灭后可再行通过路口,每正确通过一个信号灯控制路口可获得本任务附加分,再次通过此路口时不再得分,进:红灯会发射可见光,可用光级传感器检测。
红灯停图示
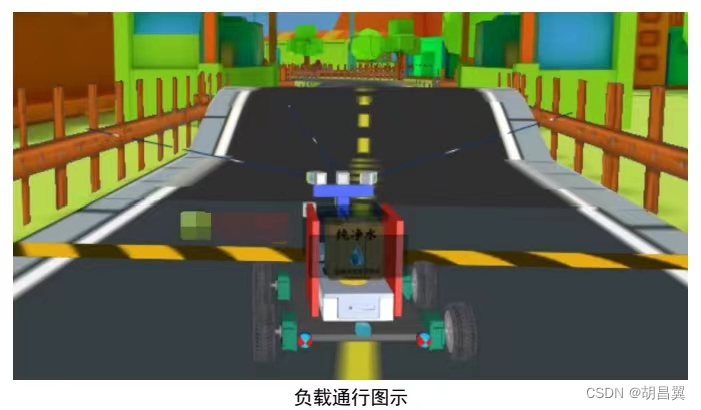
4.负载通行:在起始点后方上部建有货物自动输送装置,输送装置将在任务开始运行后的第3秒自动输送一次货物,机器人在任务限时内随身携带至少一个货物至终点即为完成负载通行任务,此任务旨在考察机器人的负裁运动能力。
负载通行图示
四、竞赛操作流程
(一)登录竞赛平台
启动竞赛平台,在登录窗口输入有效的竞赛账号用户名、密码,登录。

(二)进入对应竞赛场地
登陆竞赛平台后,按组别选择进入相应的竞赛场地。

(三)场地内编辑机器人和程序
在竞赛任务场地内,可进入“煽辑机器人”和“编辑程序”,并进行任务调诚及完成比赛任务。

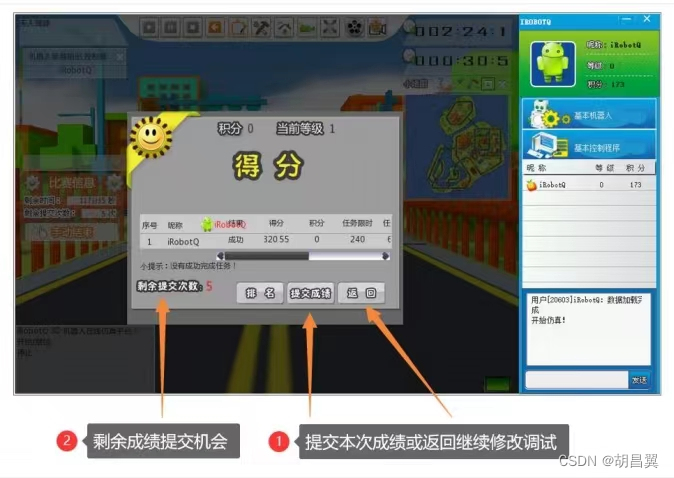
(四)提交成绩
一次任务完成自动结束成手动自主选择结束时,会显示本次任务得分、可选择提交成返回继续调试,选择提交则使用一次提交机会。
五,其它
(一)竞赛平台
统一使用组委会提供的IROB0TQ 3D机器人在线仿真平台。
(二)成绩提交
可用成绩提交次数为5次,任务完成或任务中止后均可自主提交成绩。
(三)竞赛成績与排名
选手的竞赛成绩是所有提交的威隆中的最好成绩。排名以最好成績为依据,当两个以上选手的最好成绩相同时,比较选手的次高成绩,次高成绩更好的选手排名单前、依此类推,当5次成绩都相同时,通过抽签决定最终名次。
(四)赛场纪律
参赛选手不得携带目盘、手机等任何具有存储功能的设备进入比赛现
场。不得打开、刘览除竞赛平台外的应用和信息。
(五)故障处理
如竞赛用计算机及竞赛环境中途出现航障(网络中断或死机等),选手可重新启动计算机或更换电脑后继续比赛,之前的比赛信息(机器人、控制程序和已提交过的成绩)将做一定时间内的保留,如果裁判认定某一队故意利用本规则获利,该队将受到警告、严重者将取消其比赛成绩,
(六)机器人行为规范
竟赛要求设计的机器人运行时必须企程在无人工干预的情况下,能自主完成各类安全行车和技能挑战任务。
(七)其他
其他事项如报名,组织、成绩等相关事项以活动组委会规定为准,本项目规则亦可能以补充说明的方式进行修正。
后续我会出此次无人驾驶的一些图示加文字教程















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









