







“星际穿越”主题与规则(这是第2篇,共俩篇)
继上篇
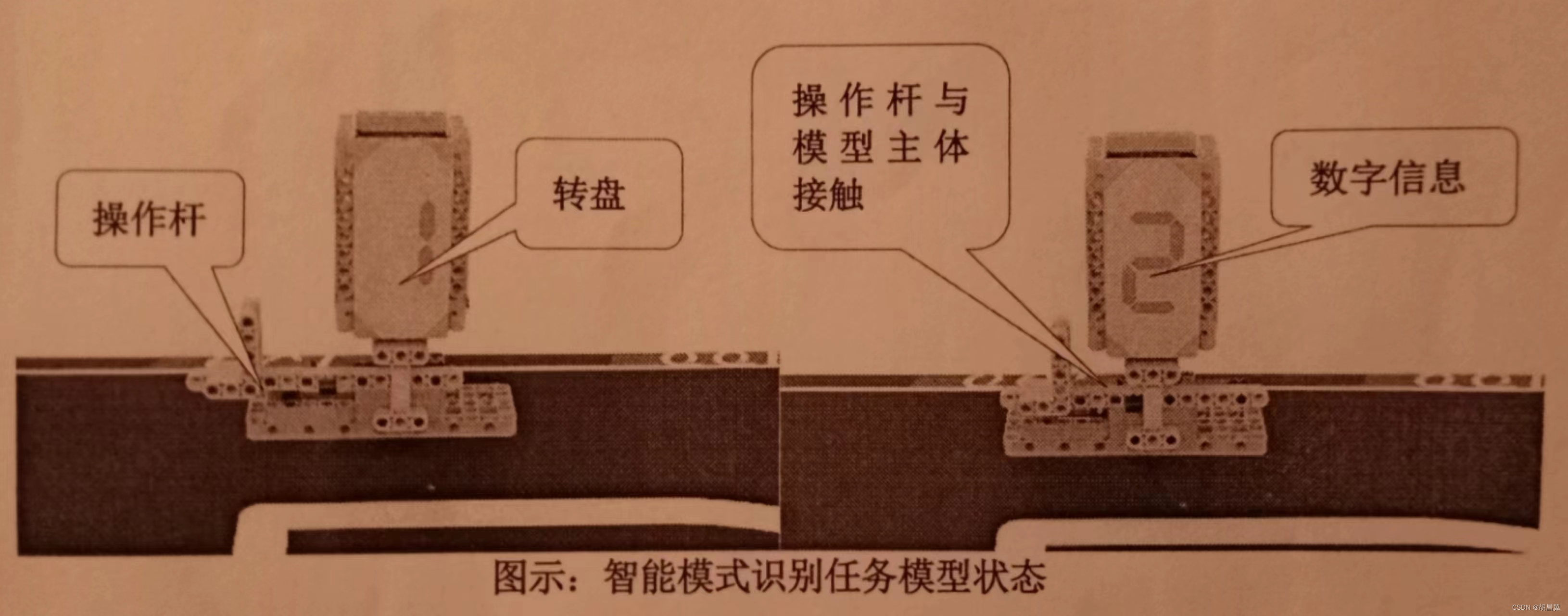
4.6.2任务过程:操作杆与模型主体接触,机器人识别转盘朝机器人一面的数字信息后,用彩灯或者屏幕显示相应颜色(显示时长不少于2秒,红色ID1、绿色ID2、蓝色ID3、黄色 ID4),亮起其他错误颜色不得分。
4.6.3任务完成标志:正确显示ID所对应的颜色。
图示:智能模式识别任务模型状态
4.7 启动虫洞观测(随机任务)
4.7.1 任务描述:任务模型由观测塔、预定位、操作杆和棘轮结构组成。
4.7.2 任务过程:机器人需要往复压下操作杆,使棘轮机构带动观测塔向上抬升。
4.7.3任务完成标志:观测塔底端高于预定位置。
图示:启动虫洞观测任务模型状态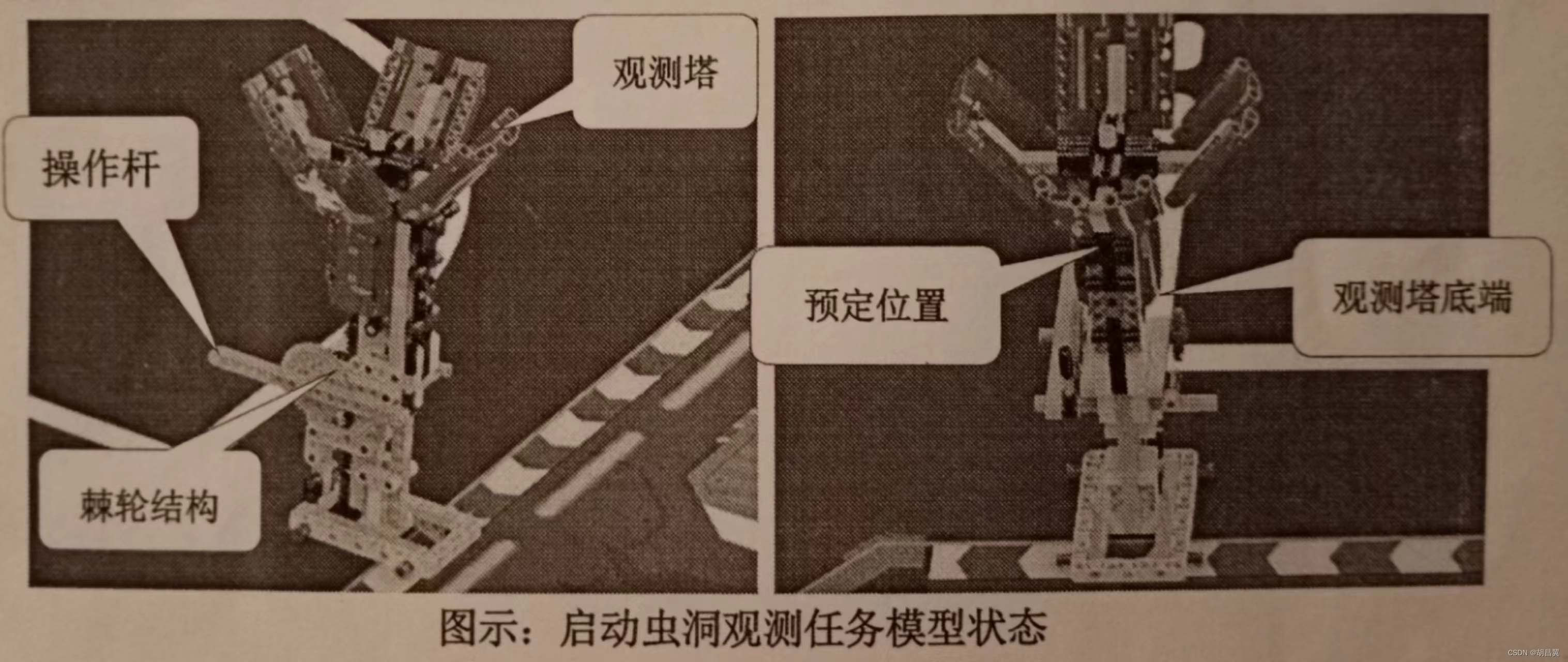
4.8转换时空能量(随机任务)
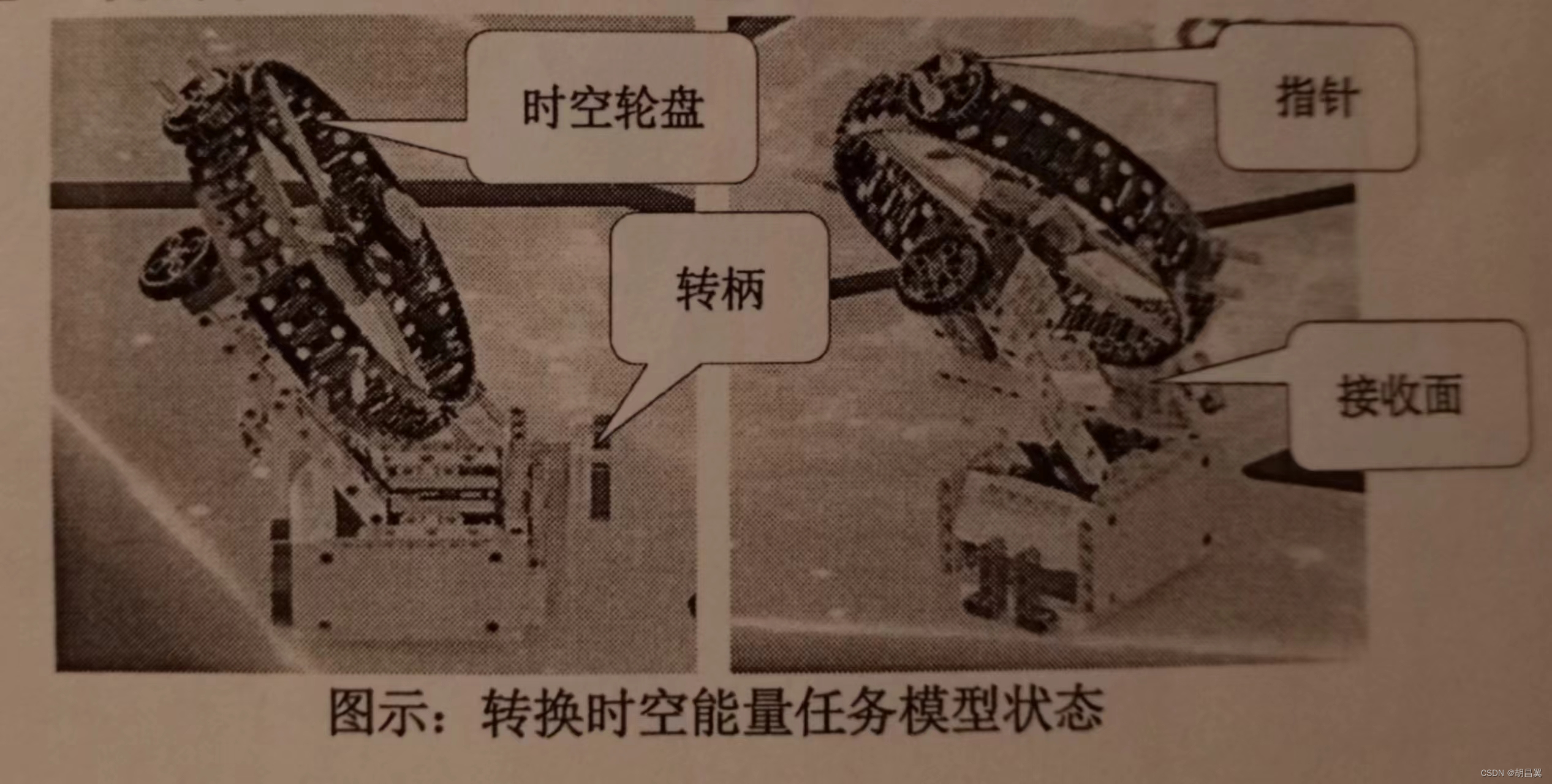
4.8.1任务描述:任务模型由时空轮盘、指针、转柄及接受器组成,转换轮盘的指针初始指向接收面正中。
4.8.2 任务过程:机器人需要转动转柄使时空轮盘转动一周以上。
4.8.3任务完成标志:观测塔底端高于预定位置。
图示:转换时空能量任务模型状态
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 223
223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









