







【51单片机】红外遥控&红外遥控电机调速(江科大)
1.红外遥控简介
· 红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出
· 通信方式:单工,异步
· 红外LED波长:940nm
· 通信协议标准:NEC标准

2.硬件电路
红外发送部分
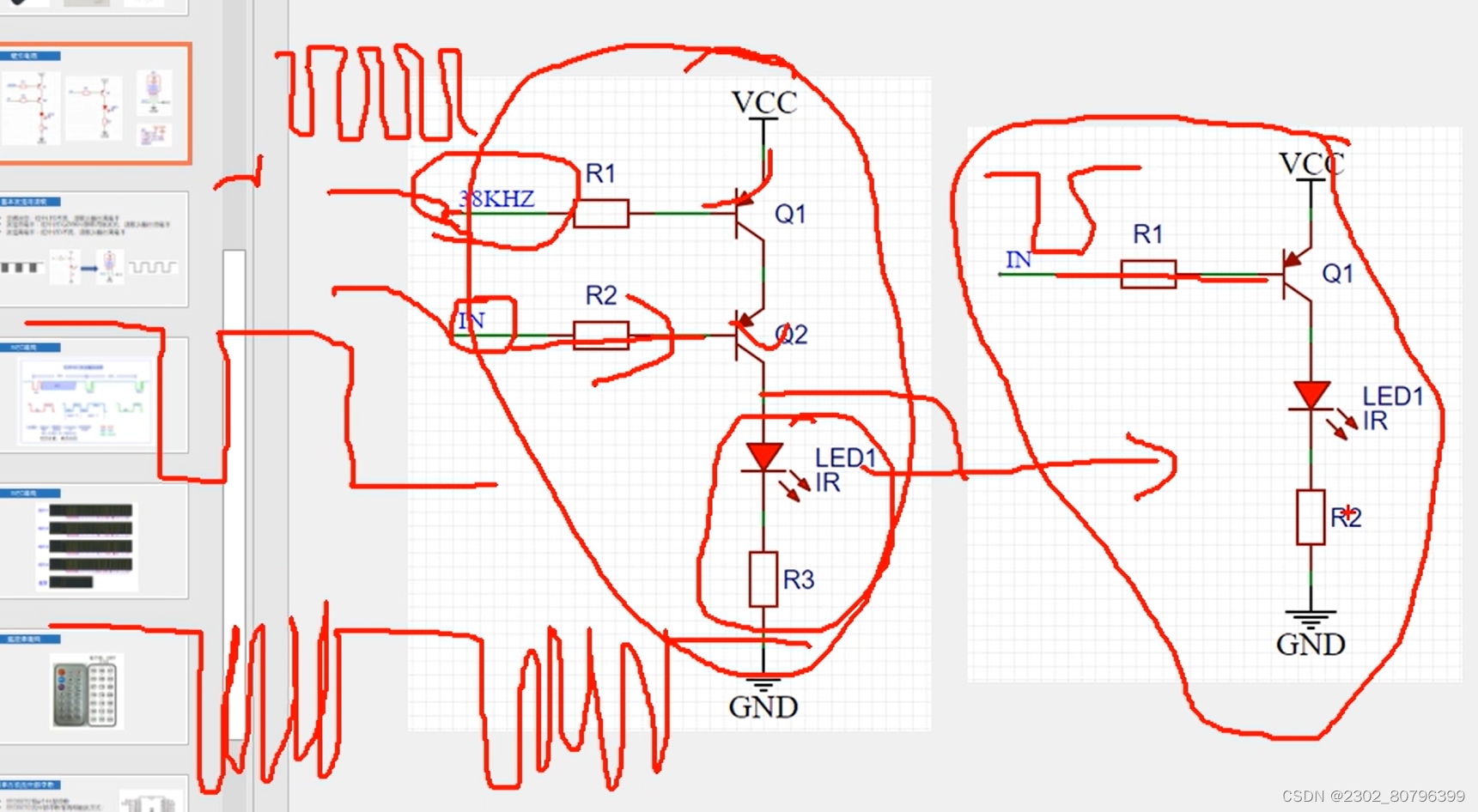
IN高电平时,LED不亮,IN低电平时,LED以38KHZ闪着亮,目的是为了抗干扰
红外接收部分
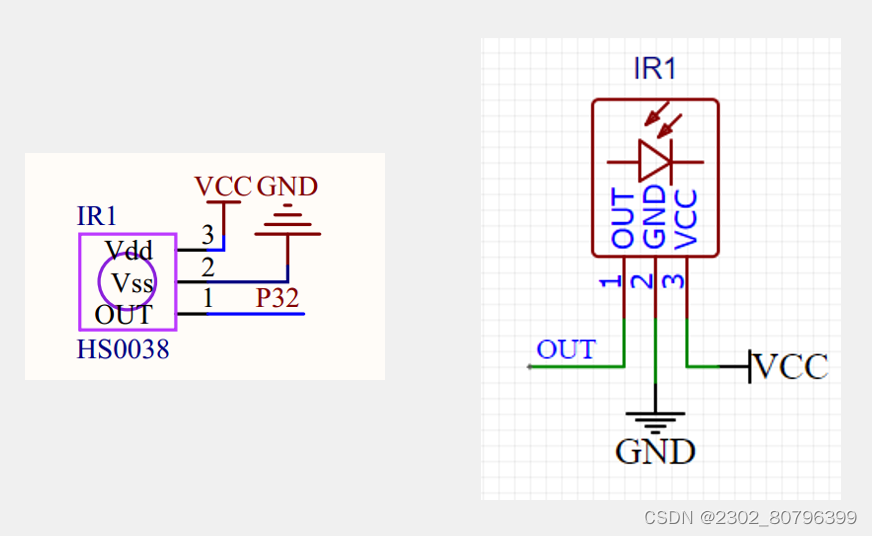
左图是开发板上的红外接收部分的原理图
右图是一体化的红外接收头的电路,其OUT口可以直接输出高低电平,在其内部会将38KHZ的波形给滤掉。在实际使用中,将OUT连接到外部中断,因为红外接收处理波形对实时性要求比较高(高低电平的宽度较短,只有几百微秒)
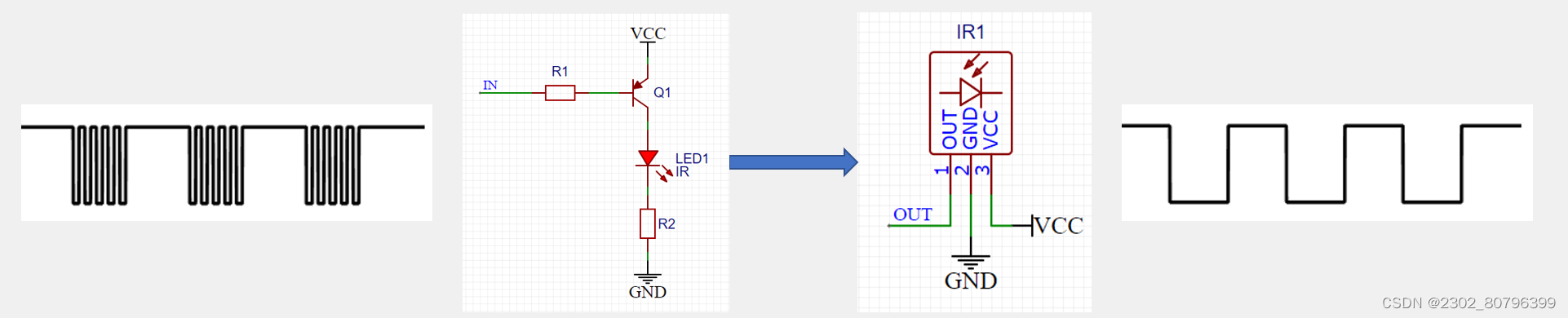
3.基本发送与接收
· 空闲状态:红外LED不亮,接收头输出高电平
·发送低电平:红外LED以38KHz频率闪烁发光,接收头输出低电平
· 发送高电平:红外LED不亮,接收头输出高电平
4.NEC编码
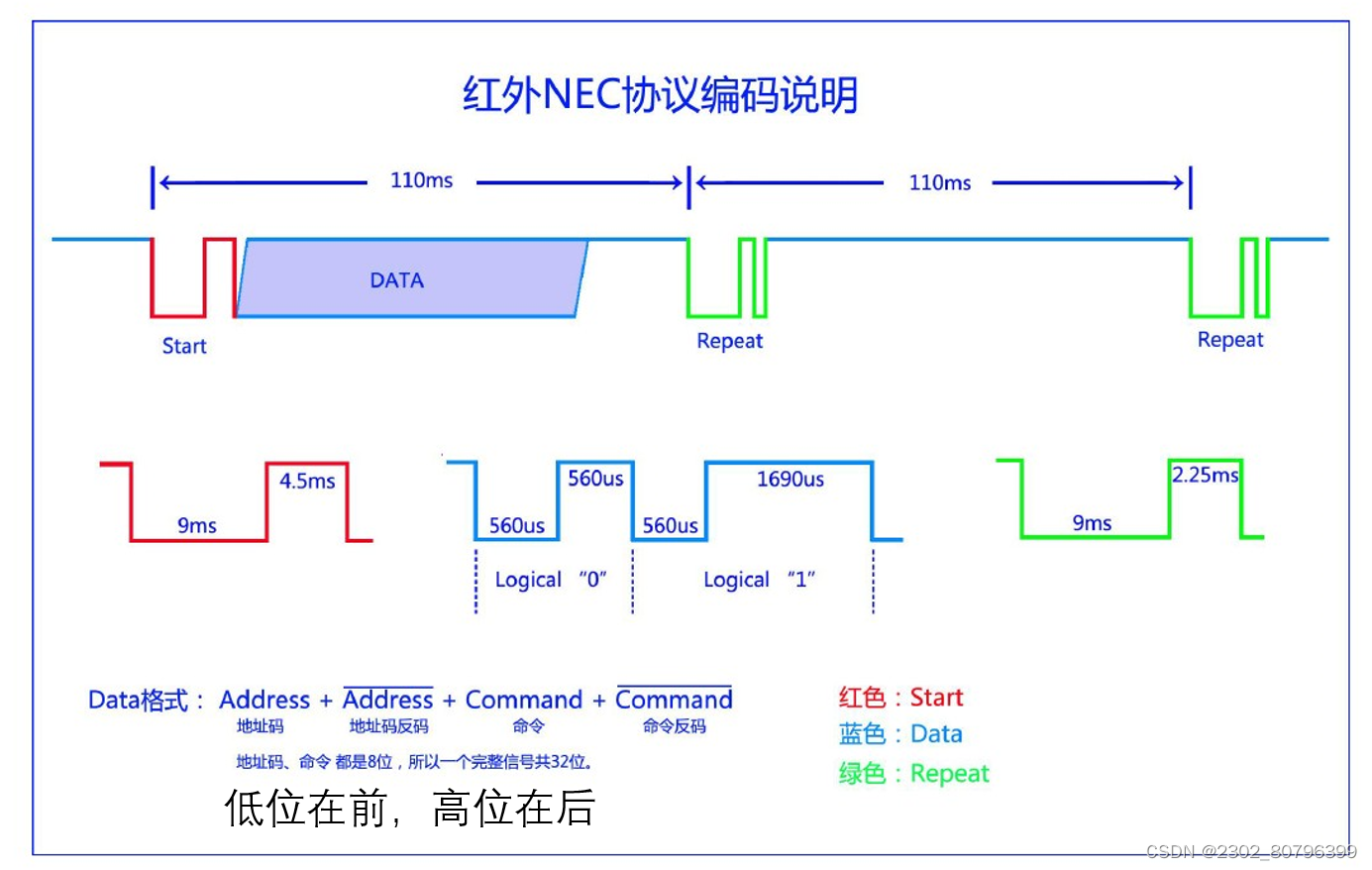
该波形是接收端OUT端口的波形
按键按下时,输出Start信号,该信号是由9ms的低电平和4.5ms的高电平组成
之后是数据区,共32位,格式如上图(反码的目的是进行数据的校验)
Repeat是支持按键长按的功能,每隔110ms就会发送这样的波形
实际波形图:
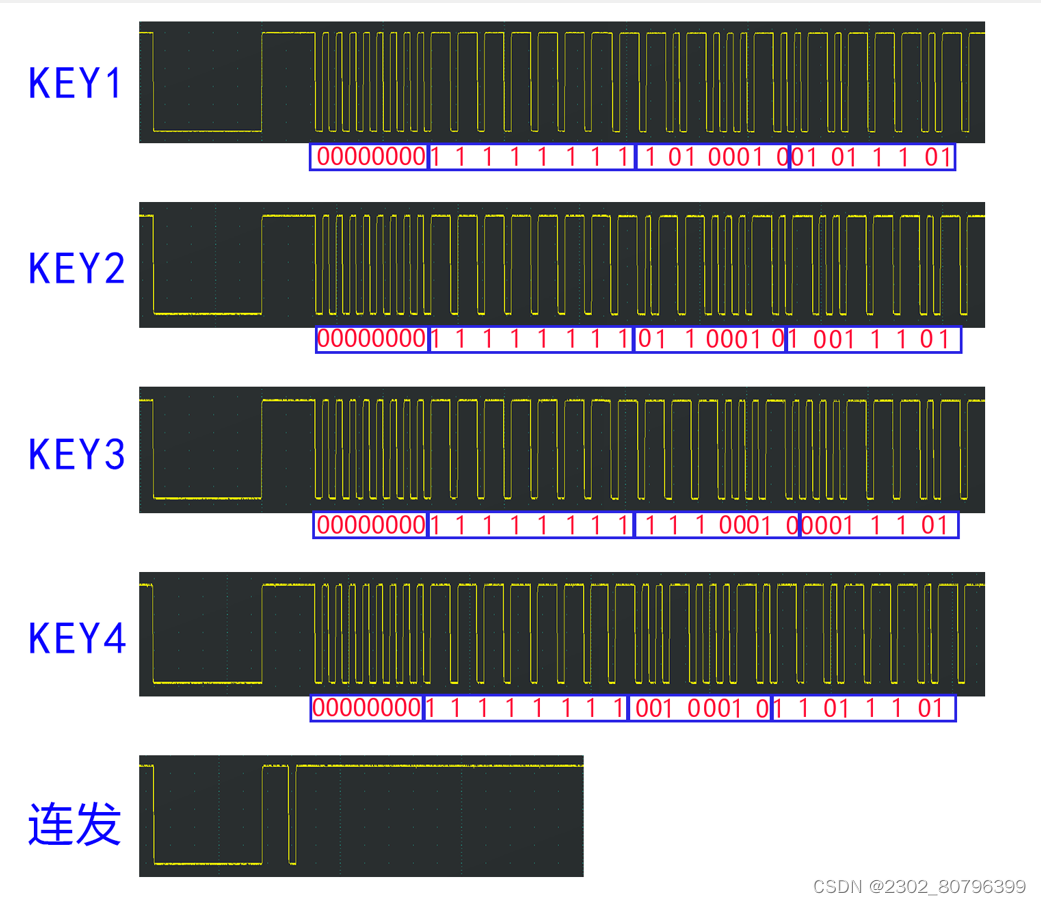
KEY1即按下遥控器第一个键码
5.遥控器键码

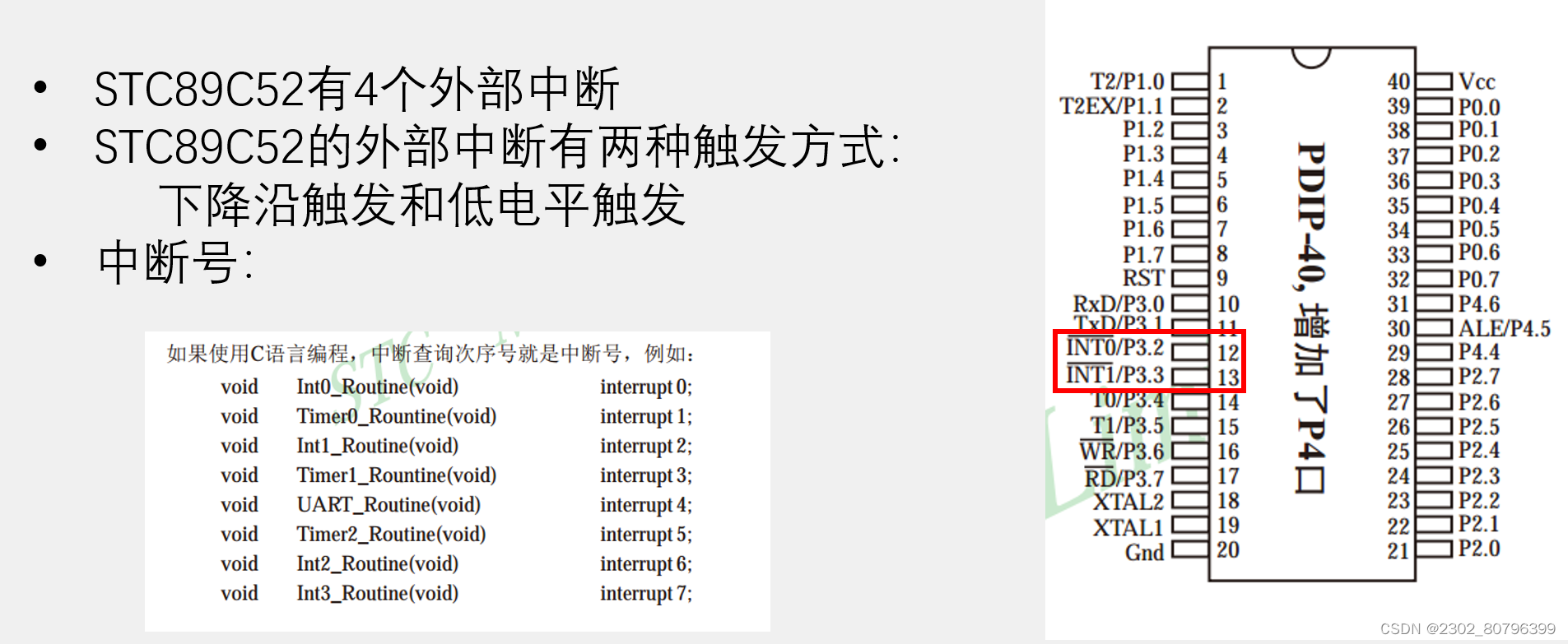
6.51单片机外部中断
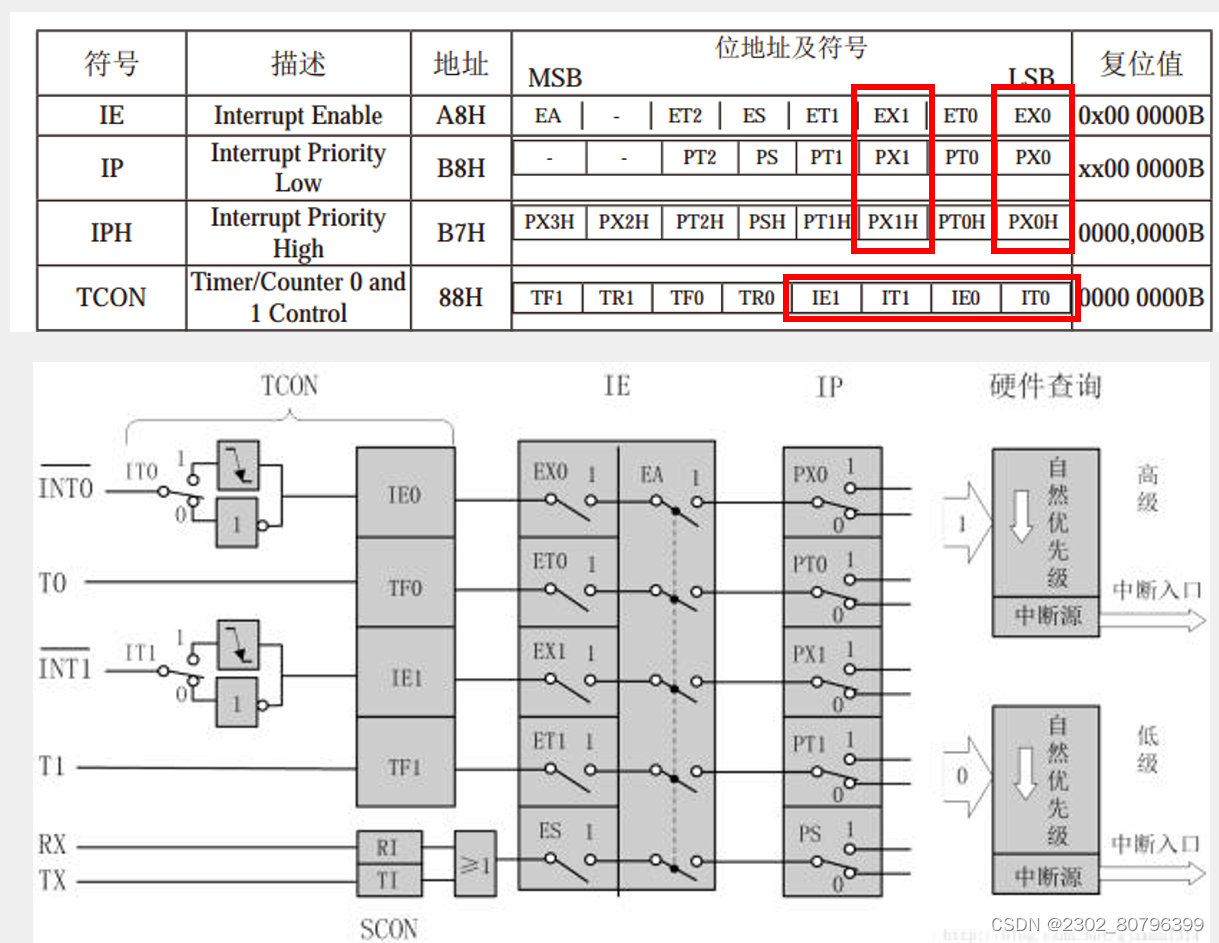
7.外部中断寄存器
P32引脚接INT0,P33引脚接INT1
IT0/IT1为1时下降沿触发,为0时低电平触发
IE0/IE1是中断标志位,当其为1时表示触发了该中断
8.红外遥控(外部中断)
现象:LCD屏幕显示遥控器的地址吗、按键的命令码以及自定义的变量Num。按下遥控器上的按键,LCD上显示的值也会随之发生改变。按VOL+键Num值会加,按VOL-键Num值会减,且支持长按。
IR.c用于存放红外解码相关程序,Int0.c用于存放外部中断0的相关程序
Int0.c用于存放外部中断0的相关程序
#include <REGX52.H>
/**
* @brief 外部中断0初始化
* @param 无
* @retval 无
*/
void Int0_Init(void)
{
IT0=1;
IE0=0;
EX0=1;
EA=1;
PX0=1;
}
/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{
}
*/
Int0.h
#ifndef __INT0_H__
#define __INT0_H__
void Int0_Init(void);
#endif
Timer0.c定时器0用于计数
#include <REGX52.H>
/**
* @brief 定时器0初始化
* @param 无
* @retval 无
*/
void Timer0_Init(void)
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0; //设置定时初值
TH0 = 0; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 0; //定时器0不计时
}
/**
* @brief 定时器0设置计数器值
* @param Value,要设置的计数器值,范围:0~65535
* @retval 无
*/
void Timer0_SetCounter(unsigned int Value)
{
TH0=Value/256;
TL0=Value%256;
}
/**
* @brief 定时器0获取计数器值
* @param 无
* @retval 计数器值,范围:0~65535
*/
unsigned int Timer0_GetCounter(void)
{
return (TH0<<8)|TL0;
}
/**
* @brief 定时器0启动停止控制
* @param Flag 启动停止标志,1为启动,0为停止
* @retval 无
*/
void Timer0_Run(unsigned char Flag)
{
TR0=Flag;
}
Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__
void Timer0_Init(void);
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter(void);
void Timer0_Run(unsigned char Flag);
#endif
IR.c用于存放红外解码相关程序
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"
unsigned int IR_Time;
unsigned char IR_State;
unsigned char IR_Data[4];
unsigned char IR_pData;
unsigned char 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2290
2290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









