







(本人新手,程序可能有些地方不规范,但是是可用的,只需初始化一个串口,然后在串口助手就可以看到距离数据。)
首先简要介绍HC-SR04模块的工作原理。该模块使用超声波测距的原理,通过发射超声波并计算从物体反射回来所需时间间隔来推算距离。模块主要包括超声波发射部、接收部及控制电路。测距时,先向Trig端口发送一个>10us的高电平脉冲来启动测距,然后模块会从Echo端口发出8周期的40Khz方波,并检测回波信号。根据回波信号的时间长度可以计算出物体的距离。
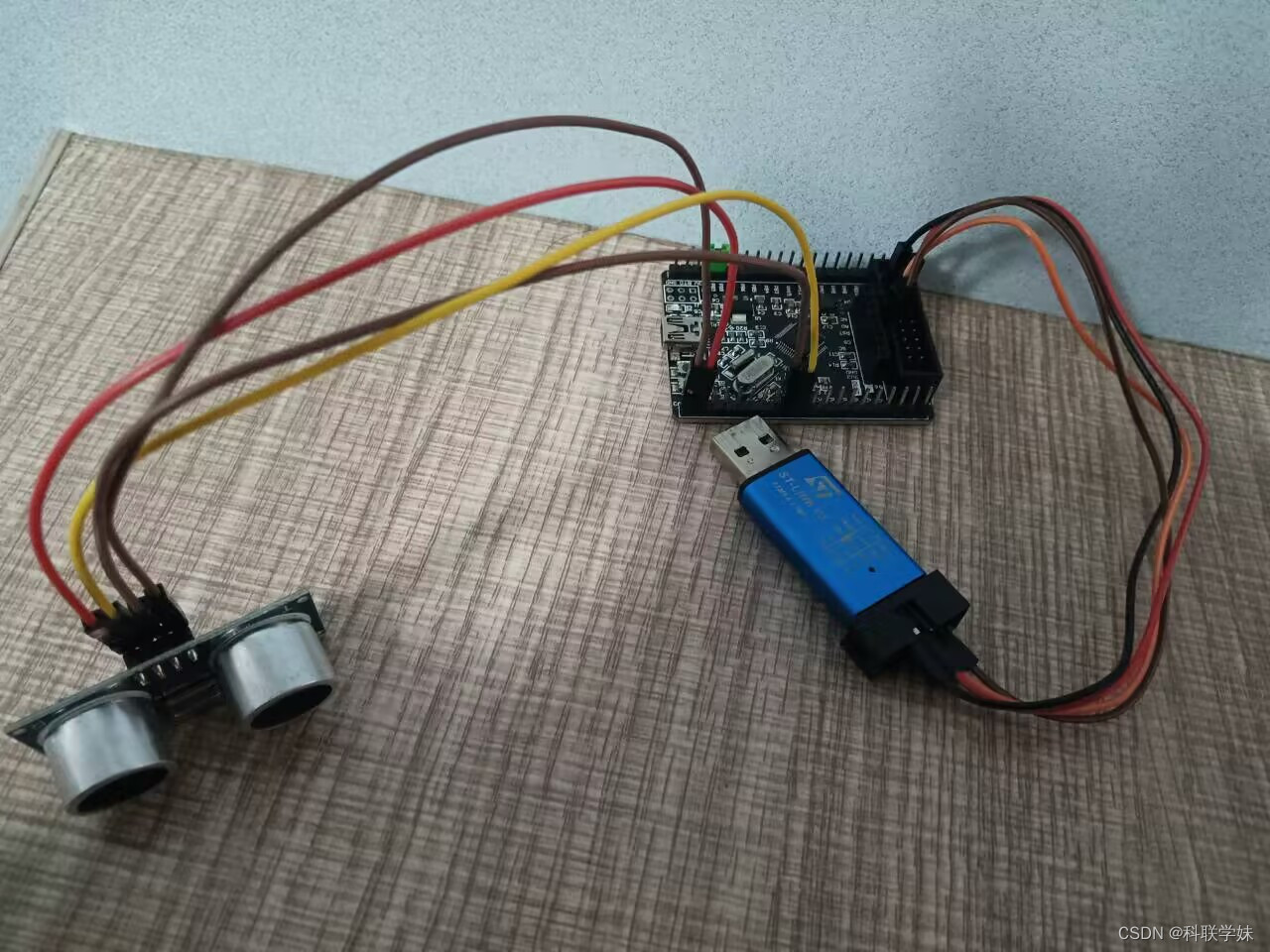
本次实验使用STM32F103芯片与HC-SR04模块进行配合,完成超声波测距和距离显示。实验步骤如下:
(1)连接传感器与STM32
VCC接单片机电源,GND端连接公共地线。Trig和Echo两端口连接到STM32单片机GPIO上,本实验Trig使用PA1,Echo使用PA2。(这里需要注意:HC-SR04模块需要5V电源供电,而STM32F103工作电压为3.3V。有电源最好连接到电源引脚)
(2)编写测距程序
在Keil或IAR工程中编写测距代码,包含GPIO初始化、超声波模块配置、发送Trig信号及回波检测、距离计算等函数。通过设置Trig输出模式,Echo输入模式来控制模块的工作。进入主函数后,在while循环内不断调用测距函数以更新距离值。
#include "stm32f10x.h"
#def 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1265
1265

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









