






1 研究背景及意义
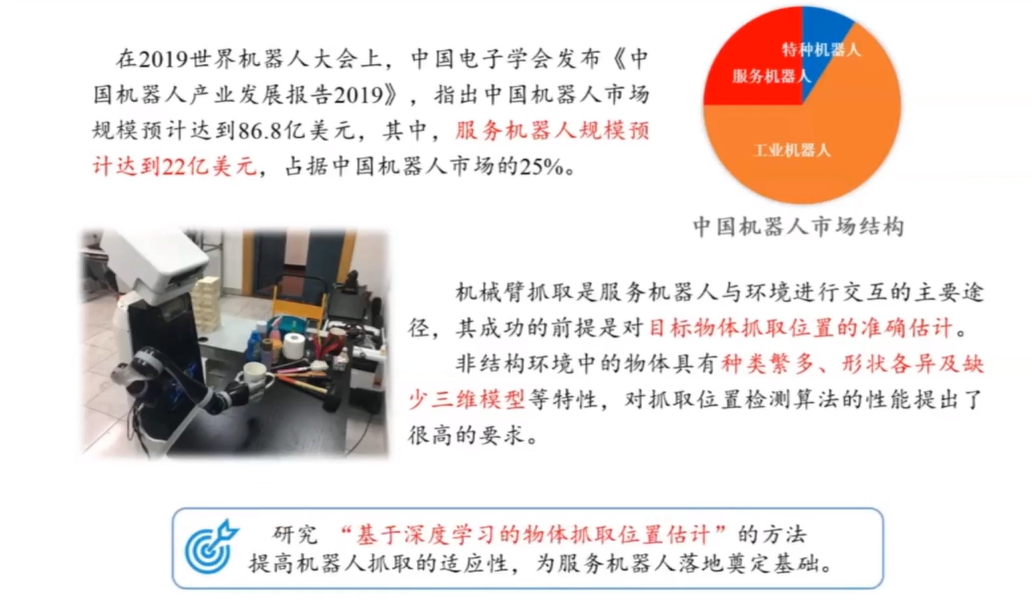

基于深度学习的抓取算法能够适应形状各异、种类不同的物品。
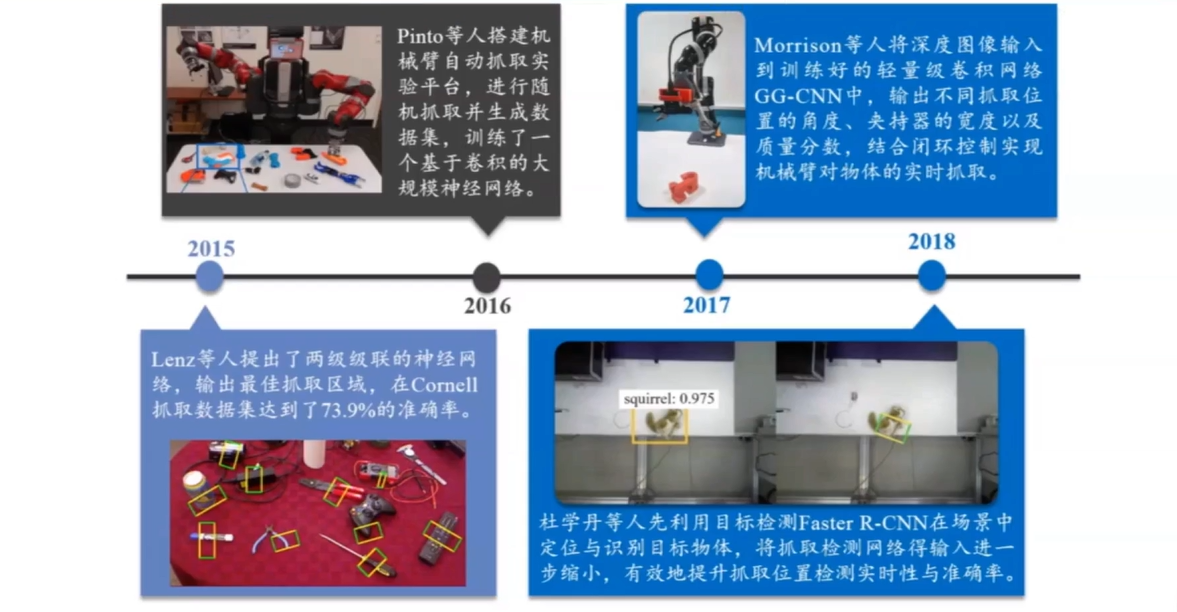
2 研究现状
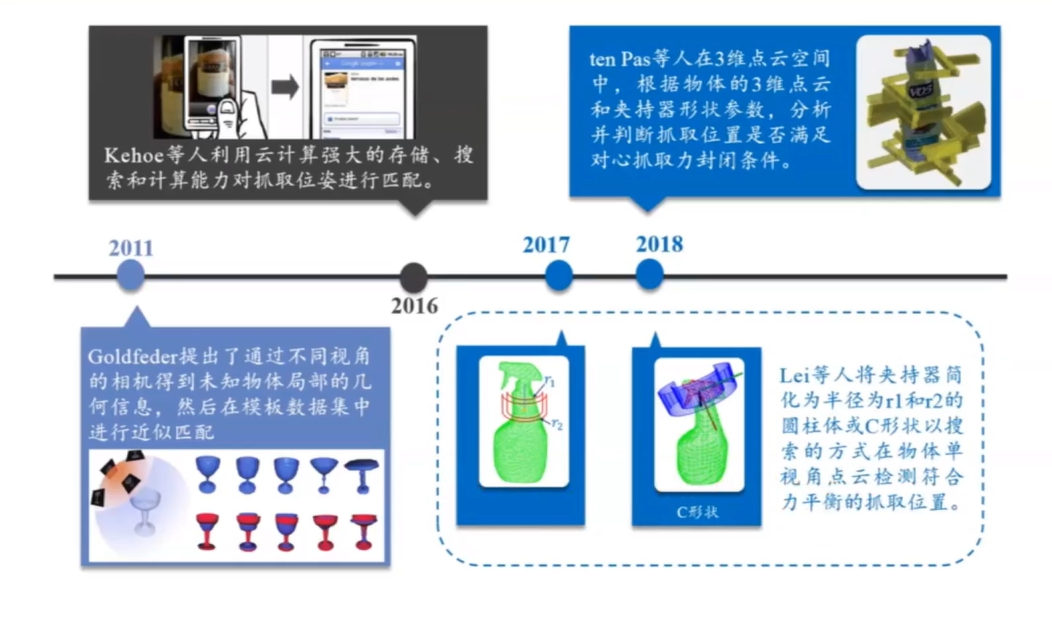
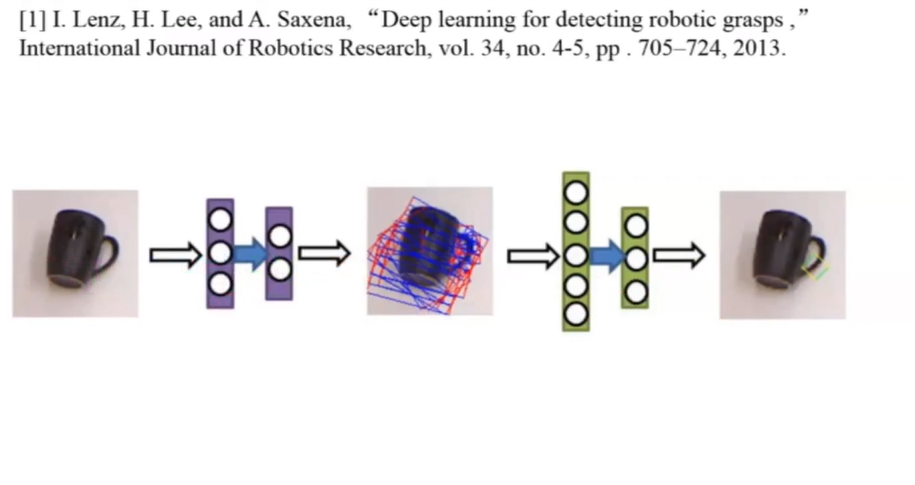
在物体抓取背景研究中,通过物体多视角特征或者计算物体位姿后在抓取模板库中,进行抓取位置匹配,比较适用于已知物体的抓取位置估计,而基于力平衡或力分析的方法可以适用于未知物体的抓取位置估计,但是计算的复杂度较高
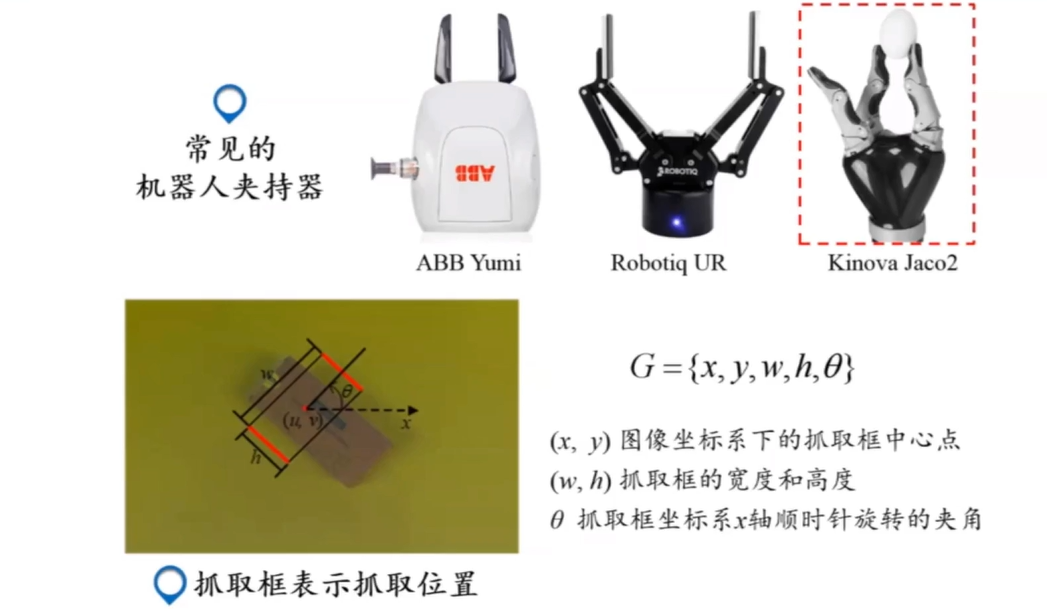
3 抓取位置分析
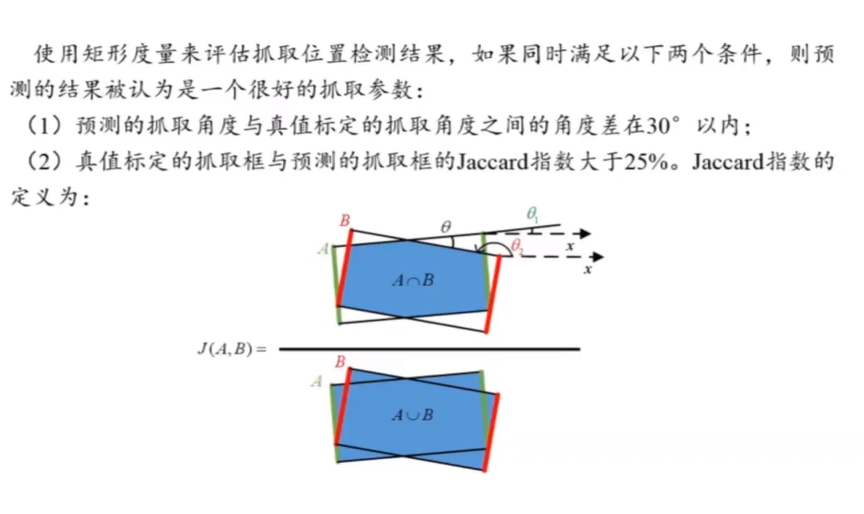
4 抓取算法度量标准
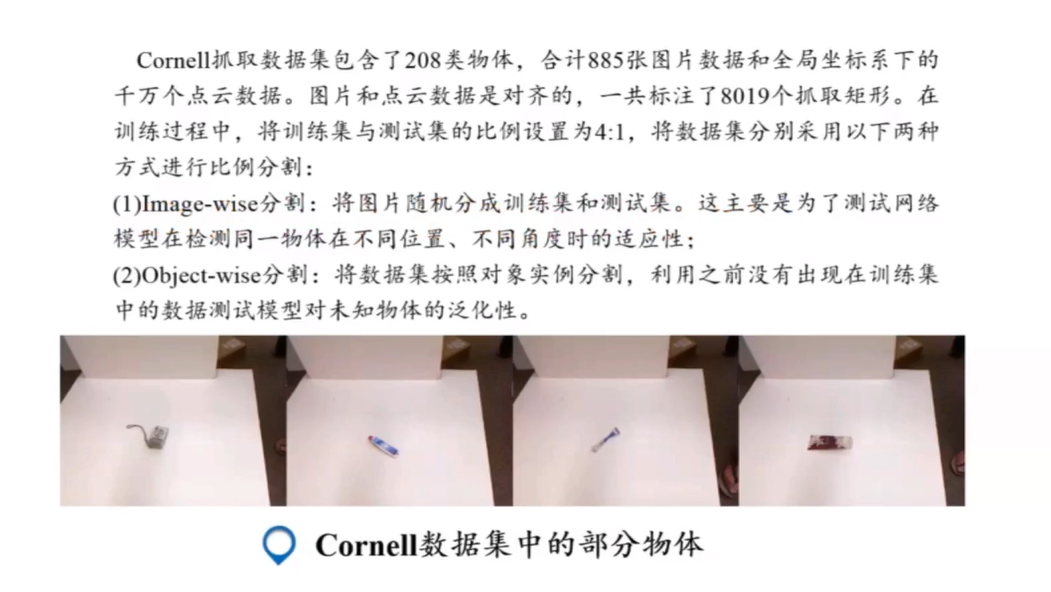
5 抓取数据集介绍
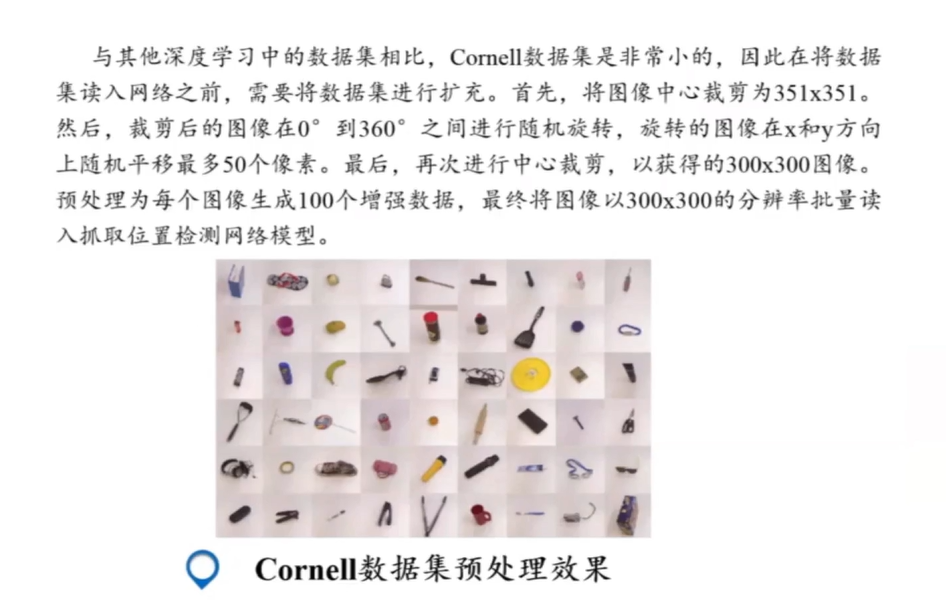
6 抓取数据集预处理
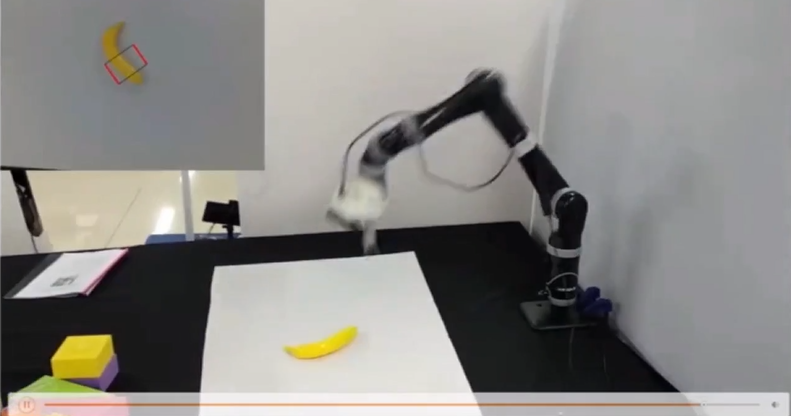
7 假阴性检测
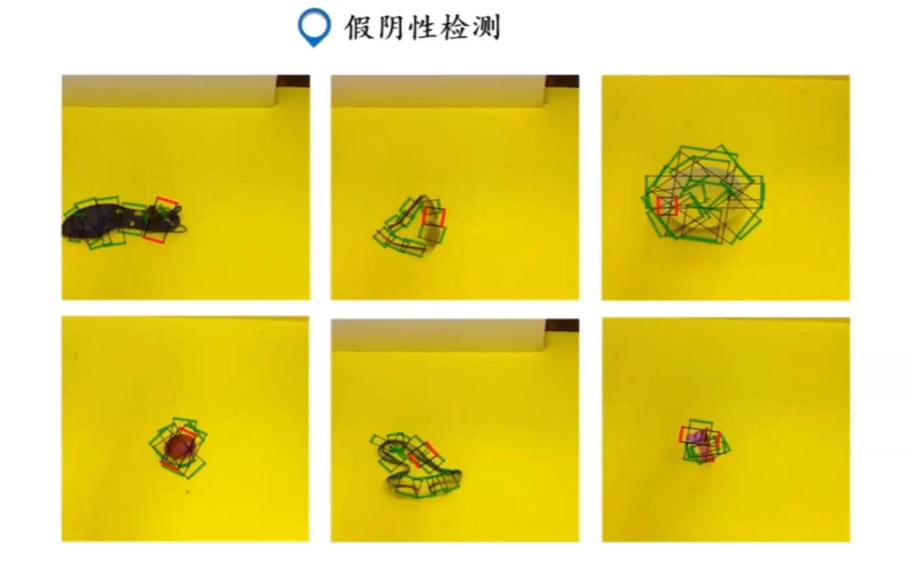
在模型测试过程中,会发现,虽然某些预测的抓取矩形框,不满足矩形度量的条件,如图所示,绿色的表示标定的抓取框,红色的框表示预测的抓取框,可以看到红色的抓取框并不满足上面提到的两个评估条件,所以在评估时,并不是一个很好的抓点参数,但是在实际效果可以看到,这是一个很好的抓点参数,这类预测结果称之为假阴性抓取检测结果,这是因为Cornell抓取数据集中,抓取位置标定并非详尽无疑,难免会出现假阴性结果的产生,从而导致了模型评估结果下降
8 抓取系统搭建
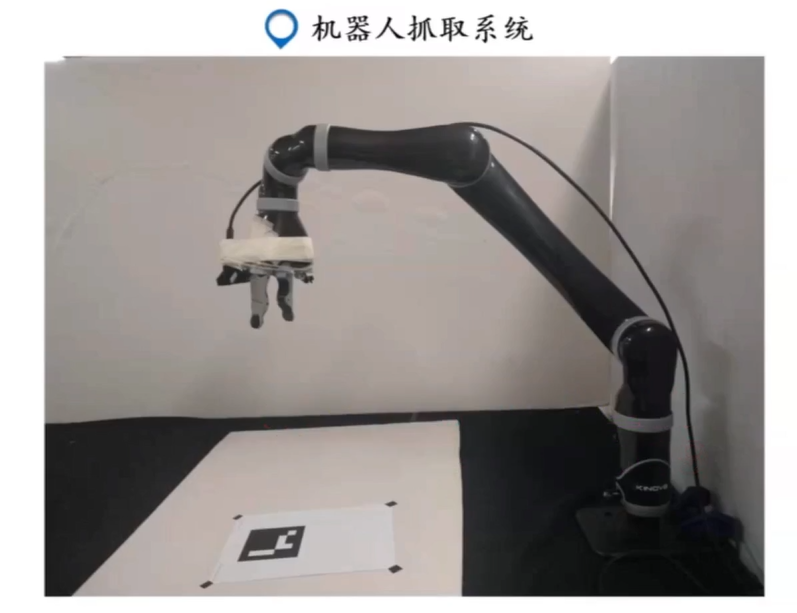
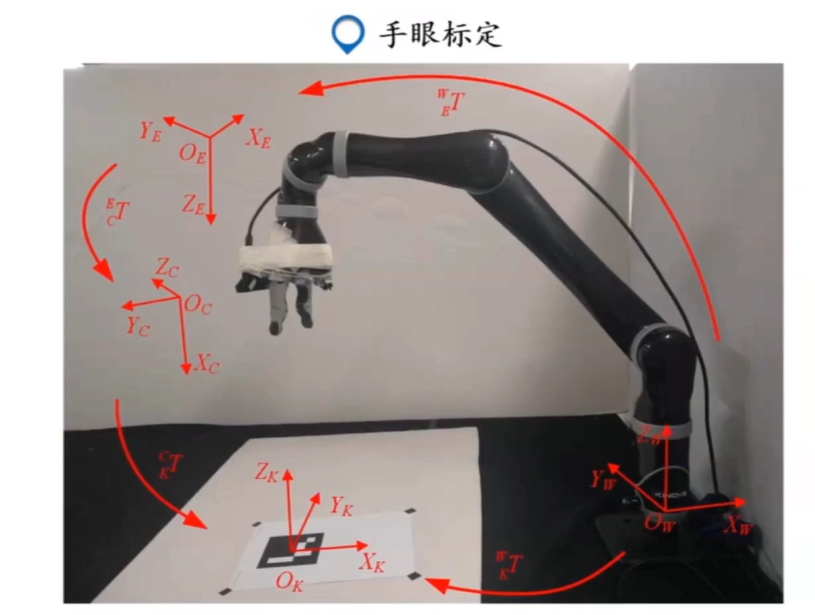
在搭建抓取系统过程中,需要进行机械臂与相机之间的手眼标定,获取一系列标定样本后,计算机械臂末端与相机坐标系变换关系
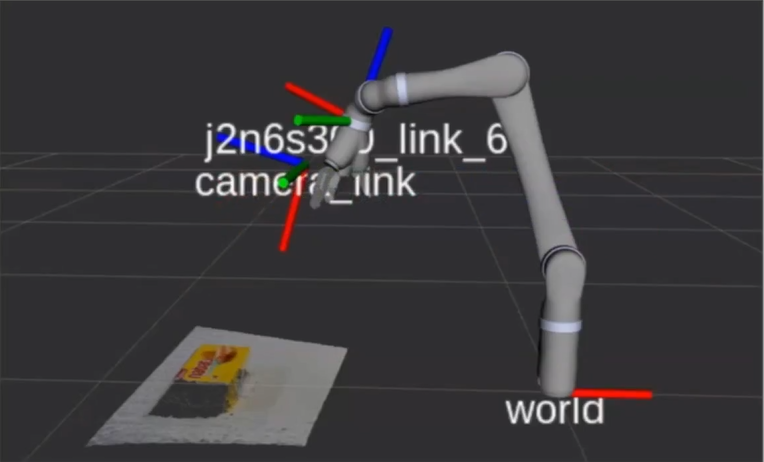
可以看到标定后的深度信息与彩色信息重合度非常高,所以可以断定此标定效果非常准确
9 机器人抓取展示

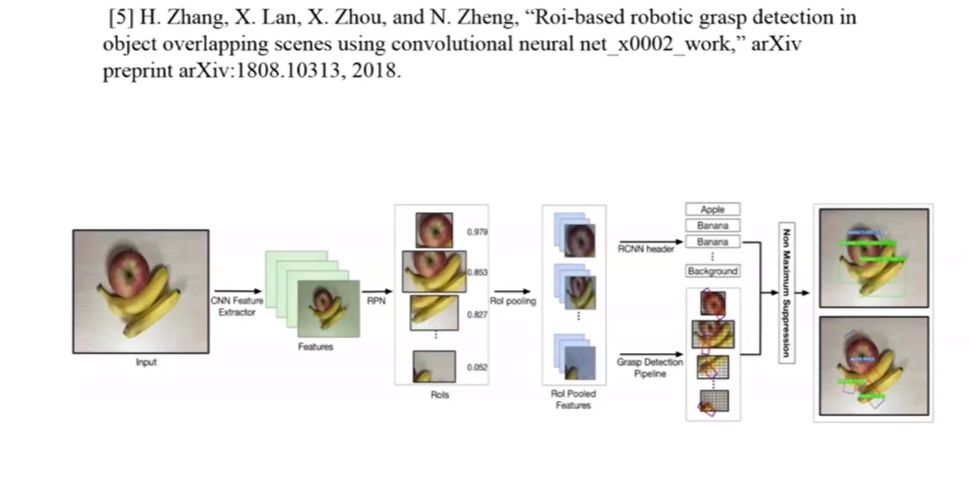
10参考文献















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









