







目录
4.Formula Student Driverless(FSD)
6. DARPA无人车挑战赛(Grand Challenge)
一、智能车竞赛介绍
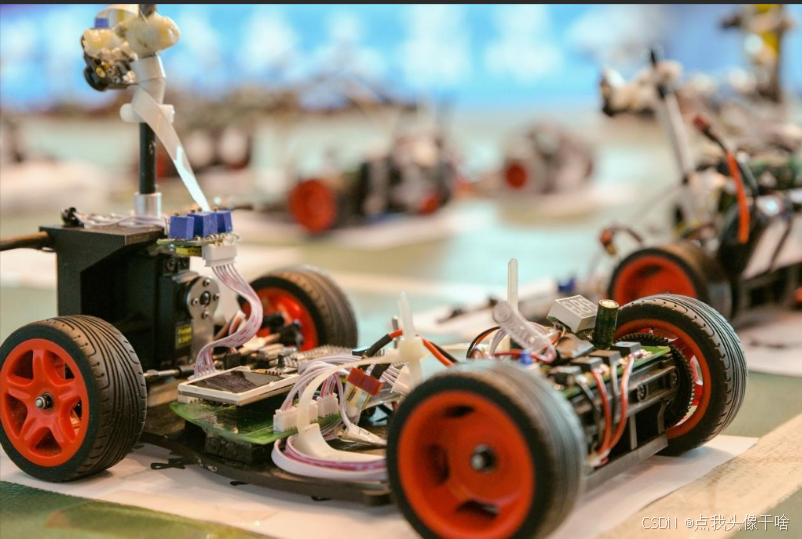
智能车竞赛是一项结合自动控制、模式识别、传感技术、电子电气、计算机和机械等多学科知识的科技竞赛。参赛队伍需设计并制作能够自主识别路径的智能车,在特定赛道上完成竞速或任务。
1. 竞赛类型
竞速赛:智能车在规定赛道内以最快速度完成比赛。
任务赛:智能车需完成特定任务,如避障、搬运等。
2. 竞赛组成
硬件:包括微控制器、传感器、电机驱动、电源等。
软件:涉及路径识别、控制算法、数据处理等。
机械结构:包括车体设计、轮子、转向装置等。
3. 竞赛流程
报名组队:参赛者组队报名,通常每队3-5人。
设计制作:队伍设计并制作智能车,涵盖硬件、软件和机械结构。
调试测试:在模拟赛道上进行调试和优化。
正式比赛:在指定赛道完成竞速或任务,按成绩排名。
4. 评分标准
速度:完成比赛的时间。
稳定性:行驶过程中的稳定性。
任务完成度:任务赛中的任务完成情况。
创新性:设计和算法的创新程度。
5. 知名竞赛
全国大学生智能汽车竞赛:中国高校广泛参与的赛事。
国际智能机器人大赛(IRHOCS):国际性赛事,包含智能车项目。
RoboCup:全球性机器人竞赛,包含智能车项目。
6. 参赛意义
实践能力:提升动手能力和工程实践能力。
团队合作:培养团队协作和项目管理能力。
创新能力:激发创新思维和解决复杂问题的能力。
职业发展:为未来在自动化、机器人等领域的发展奠定基础。
智能车竞赛是一项综合性的科技赛事,参赛者通过设计、制作和调试智能车,提升多学科知识和实践能力,同时培养团队合作和创新精神。
二、智能车竞赛案例
以下是一些知名的智能车竞赛案例,涵盖国内和国际赛事,展示了竞赛的多样性和挑战性。
1. 全国大学生智能汽车竞赛
主办单位:中国自动化学会
参赛对象:中国高校本科生
竞赛内容:
参赛队伍需设计并制作能够自主识别路径的智能车,在特定赛道上完成竞速。
赛道类型包括电磁组、摄像头组、光电组等,不同组别对传感器的要求不同。
竞赛特点:
强调软硬件结合,考验参赛者的综合能力。
赛道设计复杂,包括直道、弯道、坡道、障碍等。
案例:某高校队伍采用深度学习算法优化路径识别,结合高效的电机控制算法,最终在摄像头组别中获得冠军。
2. 国际智能机器人大赛(IRHOCS)
主办单位:国际机器人组织
参赛对象:全球高校及科研机构
竞赛内容:
智能车需在模拟城市环境中完成导航、避障、目标识别等任务。
竞赛分为多个任务模块,如自动驾驶、货物搬运、交通信号识别等。
竞赛特点:
强调智能车的环境适应能力和任务完成效率。
赛道模拟真实城市环境,具有高度复杂性。
案例:一支来自欧洲的团队利用多传感器融合技术(激光雷达、摄像头、超声波传感器)实现了高精度的环境感知,最终在自动驾驶任务中获得最高分。
3. RoboCup智能车挑战赛
主办单位:RoboCup国际联合会
参赛对象:全球高校、科研机构及企业
竞赛内容:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 782
782

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











