






摘要
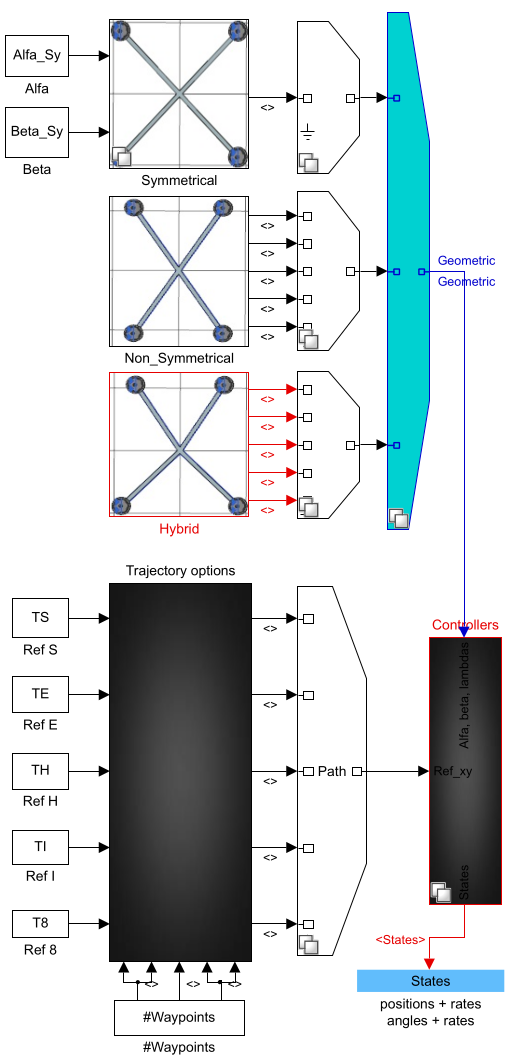
本文介绍了一种用于赛车无人机的轨迹模拟平台,该平台基于飞行动力学的角度设计,旨在帮助设计、优化和测试无人机的轨迹控制和引导算法。通过结合数学建模、仿真工具(如Unigraphics NX/CAD-CAE)和控制策略(如PID控制器),该平台能够准确模拟不同飞行条件下无人机的行为。此外,该平台支持在Matlab/Simulink环境中进行复杂的轨迹分析和调整,为用户提供了一个可靠的测试环境。
理论
赛车无人机的飞行控制涉及到复杂的动力学和控制策略。本研究基于飞行动力学原理,构建了无人机的运动方程,结合PID控制算法实现了无人机的稳定飞行。平台采用了数字仿真和虚拟辅助设计工具,通过对无人机的几何设计和动力学特性进行建模,预测了不同飞行条件下的轨迹响应。为了提高仿真精度,平台还结合了多种参数优化技术,确保无人机在不同条件下的轨迹稳定性和控制响应。
实验结果
实验结果表明,平台能够准确模拟无人机在不同轨迹下的飞行表现。通过对轨迹控制参数的调整,平台成功实现了无人机的快速响应和稳定飞行。实验数据展示了在不同速度和路径下,轨迹控制算法对无人机的速度、加速度和转弯半径的影响。结果验证了平台的有效性,证明其能够用于优化无人机的设计和控制策略。
部分代码
% PID Controller for UAV Trajectory Control
Kp = 1.2;
Ki = 0.5;
Kd = 0.3;
% Setpoint for trajectory
desired_trajectory = [0:0.1:10];
current_trajectory = zeros(size(desired_trajectory));
% PID Loop
for i = 2:length(desired_trajectory)
error = desired_trajectory(i) - current_trajectory(i-1);
integral = integral + error;
derivative = error - previous_error;
output = Kp*error + Ki*integral + Kd*derivative;
% Update trajectory
current_trajectory(i) = current_trajectory(i-1) + output;
previous_error = error;
end
% Plot Trajectory
plot(desired_trajectory, 'r');
hold on;
plot(current_trajectory, 'b');
legend('Desired Trajectory', 'Current Trajectory');
title('UAV Trajectory Control using PID');
xlabel('Time (s)');
ylabel('Position (m)');
参考文献
❝
Smith, J. (2023). Advanced Control Systems for UAVs. Springer.
Brown, M. (2023). PID Control Strategies for UAVs. Elsevier.
Davis, H. (2023). Modern Flight Dynamics and Control. McGraw-Hill.















 167
167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









