







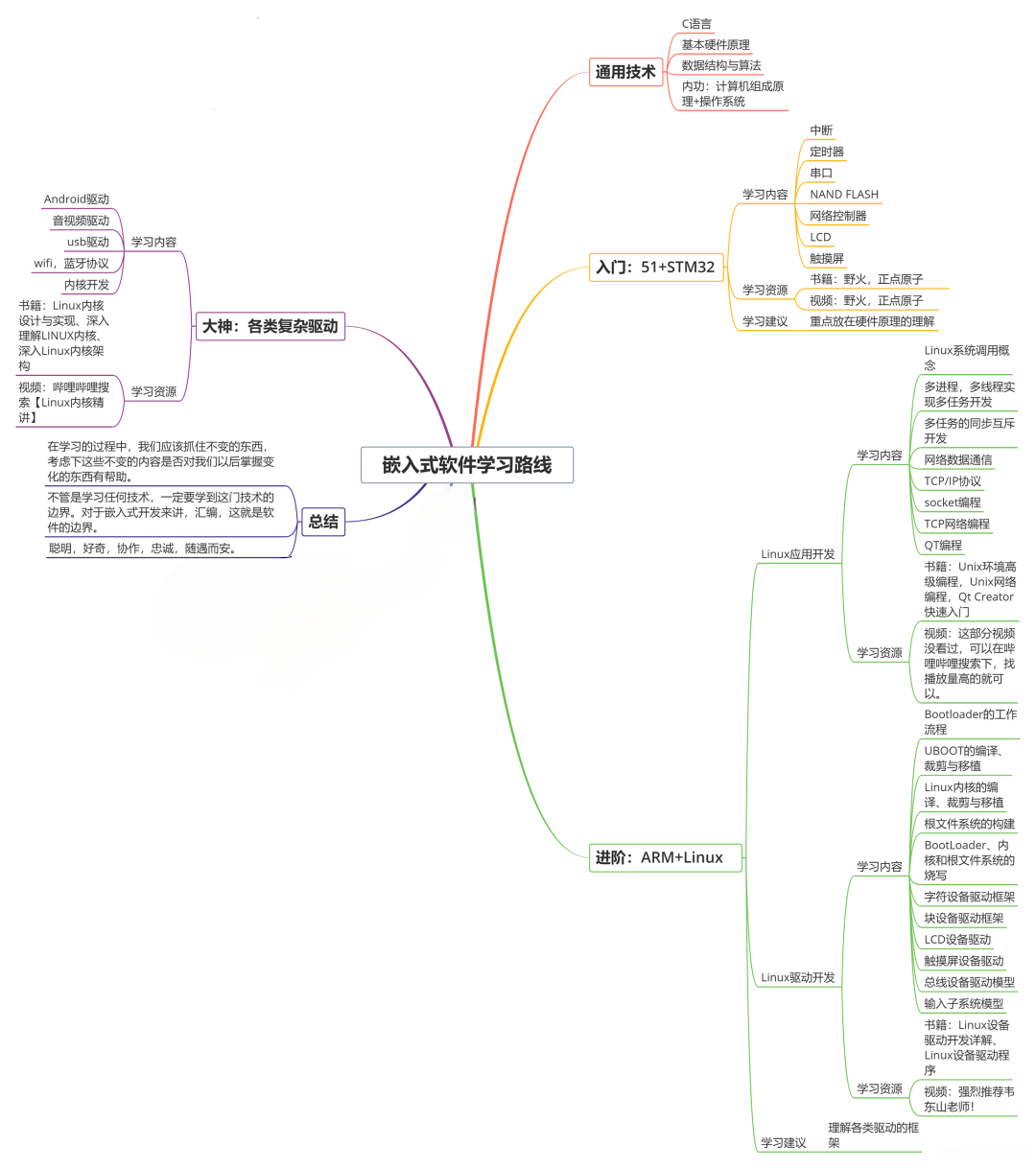
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。

需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
让用户对当前系统的行为感到困扰。此时可以使用下面的
8.命令将节点从列表中删除:
rosnode cleanup
9.在 ROS系统中查看节点之间的发布-订阅关系的最简单方式就是在终端输入如下命令:
rqt_graph
在默认情况下,rqt_graph 隐藏了其认为只在调试过程中使用的节点。你可以通过取消“Hide debug”选项来禁止这个特性
个人偏好是将下拉选项中的 Nodes only 改为 Nodes/Topics(all),并取消除 Hide Debug 以外所有的复选框。这种设置的好处在于能用矩形框显示所有的话题,以区别于节点的椭圆形表示话题列表
10.为了获取当前活跃的话题,使用如下命令
rostopic list
当然,这个列表列举的话题和 rqt_graph 中展示的话题应该是一样的,但是用文本的形式展示出来更方便
11.打印消息内容为了查看某个话题上发布的消息,可以利用rostopic命令的如下形式:
rostopic echo topic-name
12.这条命令将会在终端里显示出指定话题里发布的任何消息。当键入下面的命令后
rostopic echo /turtle1/cmd_vel
测量发布频率有两个命令可以用来测量消息发布的频率以及这些消息所占用的带宽:
rostopic hz topic-name
rostopic bw topic-name
这些命令订阅指定的话题,并且输出一些统计量,其中第一条命令输出每秒发布的消息数量,第二条命令输出每秒发布消息所占的字节量。
13.查看话题 利用 rostopic info 命令,你可以获取更多关于话题的信息:
rostopic info topic-name
例如,根据如下命令:
rostopic info /turtle1/color_sensor
14.查看消息类型要想查看某种消息类型的详情,使用类似下面的命令
rosmsg show message-type-name
让我们对上面用到的/turtle1/color_sensor 消息类型尝试下这个命令:
rosmsg show turtlesim/Color
用命令行发布消息大多数时候,发布消息的工作是由特定的程序完成的。但是,你会发现有时候手动发布消息是很实用的。要实现该功能,利用rostopic命令行工具
rostopic pub –r rate-in-hz topic-namemessage-type message-content
这条命令重复地按照指定的频率给指定的话题发布指定的消息。
该命令最后的参数 message-content 应该按顺序提供消息类型中所有域的参数值。
rostopic pub –r 1 /turtle1/cmd_velgeometry_msgs/Twist ’[2,0,0]’ ’[0,0,0]’
15.当ROS没有按你的预期运行时,一种可能有帮助的工具,是roswtf*,26,27,该命令可
以不带参数运行:
Roswtf
gedit~/catkin_ws/src/beginner_tutorials/src/talker.cpp 此命令会自动创建一个名为talker.cpp的文件,此命令在文本里操作
或者用vim ~/catkin_ws/src/beginner_tutorials/src/talker.cpp 此命令也会自动创建文件,但是在vim编辑框里进行操作。
2.安装GIMP
sudoapt-get install gimp
3.GIMP中文启动
LANGUAGE=zh_CNgimp
4.GIMP中文教程:http://docs.gimp.org/2.2/zh_CN/introduction.html
rospack = ros+pack(age) : provides information relatedto ROS packages
rosstack = ros+stack : providesinformation relatedtoROS stacks
roscd = ros+cd : changes directoryto a ROS packageor stack
rosls = ros+ls : lists files in a ROSpackage
roscp = ros+cp : copies filesfrom/to a ROS package
rosmsg = ros+msg : providesinformation relatedtoROS message definitions
rossrv = ros+srv : providesinformation relatedtoROS service definitions
rosmake = ros+make : makes (compiles) aROS package
vi是Linux终端下或控制台下常用的编辑器,基本的操作方式为:vi /路径/文件名
例如,vi /etc/fstab表示显示/etc/fstab文件的内容。使用键盘上的Page Up和Page Down键可以上下翻页;按下Insert键,可以见到窗口左下角有“Insert”字样,表示当前为插入编辑状态,这时从键盘输入的内容将插入到光标位置;再按下Insert键,左下角将有“Replace”字样,表示当前为替换编辑状态,这时从键盘输入的内容将替换光标位置的内容。编辑完内容后,按下Esc键,并输入“:wq”,然后回车就可以保存退出。
如果不想保存而直接退出,则按下Esc键后,输入“:q!”,然后回车即可。“wq”表示Write和Quit,即保存退出;“q!”表示忽略修改强行退出
Linux下的编辑器最常用的就是vim或者vi文本编辑。vi 和vim 编辑器的区别是vim是vi的改进版本,在vi 编辑器的基础上上扩展了很多实用的功能。 大多数的linux/unix 发行版本中都使用 vim 代替了原来的 vi 文本编辑器。如果是centos或者redhat系统,当系统安装完毕后,vi/vim 文本编辑器默认情况下就已经被安装了。如果是debian/ubuntu系统下,默认情况下,vim编辑器是不会被安装的。你需要在ubuntu系统下手动安装vim编辑。
vi/vim文本编辑器是我们在linux系统下工作可以说是必须会使用的一个工具,因为linux系统的设计理念是一切皆文件,也就是说,你在linux里的任何操作都是对文件的操作,所以会经常去操作文件,更改文件,保存文件,退出并保存文件。那么在linux下,如何使用vim/vi 文本编辑器来新建文件,编辑文件,保存文件呢?如何使用vim/vi文本编辑器的查找命令来查找特定的文本呢?如何使用vim/vi 文本编辑器中的查找并替换命令来对文本做批量更改呢?
本文将会给大家详细讲述如何在linux操作系统下使用vi/vim 文本编辑器。
vi/vim模式介绍
在linux vi/vim 文本编辑器里有三种模式:命令模式,输入模式和末行模式。这三者模式的区别是什么呢?
命令模式是vi/vim 编辑器进入后的默认模式,从命令模式可以切换到输入模式和末行模式,如果当你进入另外的两种模式后,可以使用“ESC”键退回到命令模式。在命令模式下,可以输入一些文本编辑器特有的命令,比如说你想编辑文件,那么就需要输入“i”,让当前模式变为插入模式或者输入模式,这样你就可以编辑这个文本了。
输入模式顾名思义就是要对本文做输入的操作,也就是说可以对文件做出更改操作。否则,你在命令模式下,vi/vim 文本编辑器是只读模式,你无法对文本做出更改。
末行模式是是命令模式下输入”:”,当你在输入模式下,对文件做了更改,那么需要先退回到命令命令,再进入末行模式,并输入”wq”后,即可保存并退出 vi/vim 文本编辑器。如果想不保存退出 vi/vim 文本编辑器,那么直接输入”q!”,即可。
在linux系统下运行 vi/vim 文本编辑器
在linux命令行下,输入 vi 或者vim 命令:
| 1 | vi |
或者
| 1 | vim |
linux 下 vim/vi 文本编辑器常用命令
#1 进入vi/vim文本编辑器的命令
vi filename:打开或新建文件,并将光标置于第一行行首的位置
vi +n filename: 打开文件,并将光标置于第n行的位置
vi + filename: 打开文件,并将光标置于最后一行的位置
vi +/pattern filename: 打开文件,并将光标置于第一个与pattern匹配的行首
vi -r filename: 在上次征用vim 文本编辑器的时候发生系统奔溃后,恢复filename 文件
vi filename1…filenamen: linux vi/vim 文本编辑器可以通过打开多个文件,依次进行编辑
#2 linux vi/vim 文本编辑器下移动光标的命令
H: 光标移到屏幕顶行
M: 光标移到屏幕中间行
L: 光标移到屏幕最后行
0:光标移到当前行首
$: 光标移到当前行尾
#3 linux vi/vim 文本编辑器下屏幕翻滚类命令
Ctrl+F:向前翻整页
Ctrl+U:向前翻半页
Ctrl+B:向后翻整页
Ctrl+D:向后翻半页
#4 Linux vi/vim 文本编辑器插入文本类命令
i: 在光标前
I:在当前行行首
a: 在光标后
A: 在当前行尾
o: 在当前行之下新开一行
O: 在当前行之前新开一行
#5 Linux vi/vim 文本编辑器删除命令
do:删至行首
d$: 删至行尾
dd: 删除光标所在行
ndd: 删除当前航及其后n-1行
D: 删除当前光标到行尾的内容
Ctrl+u:删除输入方式下输入的所有文本
#6 Linux vi/vim 文本编辑器搜索及替换命令
/pattern: 从光标开始处向文件尾搜索pattern模式
?pattern: 从光标开始处向文件首搜索pattern 模式
:s/p1/p2/g :将当前行中所有p1替换成p2
:n1,n2s/p1/p2/g:将第n1行到n2行中所有的p1替换成p2
:g/p1/s//p2/g:将文件中所有的p1替换成p2
#7 Linux vi/vim 文本编辑器拷贝和粘贴命令
在vi/vim文本编辑器中”y”表示拷贝,”d”表示删除, “p”表示粘贴,通常与光标移动命令结合使用
y
:
表示拷贝从当前光标处到行尾的内容
d
: 表示拷贝从当前光标处到行尾的内容 d
:表示拷贝从当前光标处到行尾的内容d: 表示删除从当前光标到行尾的内容
yy: 表示拷贝光标所在行
#8 Linux vi/vim 文本编辑器撤销操作命令
u:取消最近一次的操作
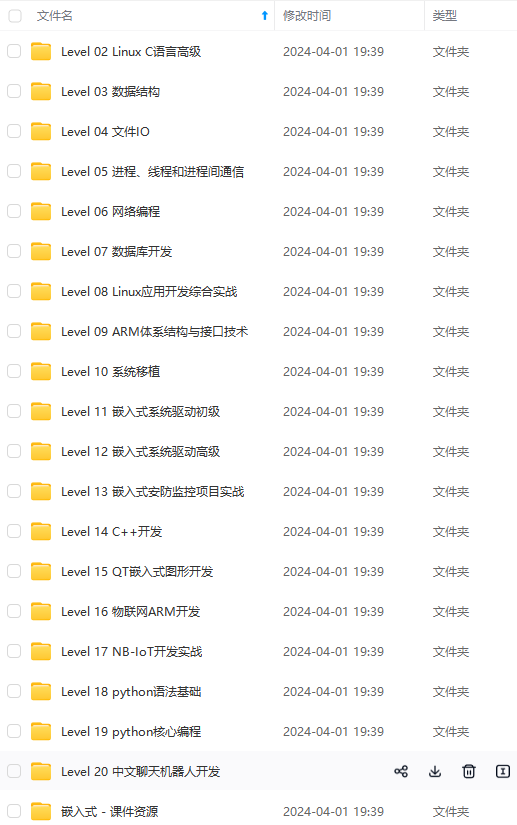

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
59)]
[外链图片转存中…(img-cDrmtJQs-1715790755159)]
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)















 1769
1769

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









