







第三章 灯丝驱动电源
灯丝电源和逆变控制是典型的闭环控制系统。闭环控制系统的通用框图如图1所示。
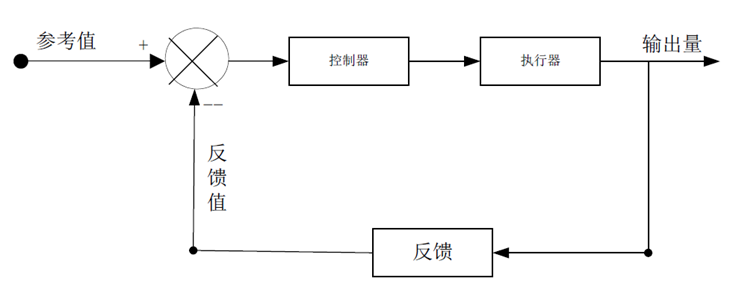
图1:自动控制系统框图
而典型的阶跃响应曲线如图2所示。
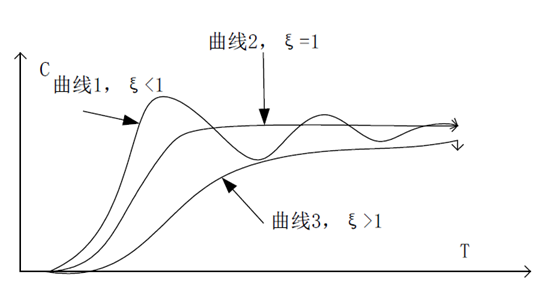
图2:阶跃响应曲线
曲线1的系统是欠阻尼系统,阶跃存在一些振荡,表现为输出过冲;曲线2为临界阻尼,系统响应没有振荡,稳定快;曲线3为过阻尼,特点是没有过冲,响应慢。
灯丝电路实例1,见图3所示。按照图1自动控制系统框图,参考电路由运放U3A、U3B及外围电路组成;控制器由运放U4B和PWM IC U3 SG3524组成;执行器是由MOSFET Q3、Q6、Q10、Q13和它们的驱动电路组成;反馈电路由电流互感器T1和RMS转换器U5 AD736KN组成。
参考值电路是灯丝电流设定电压经U3B的反向缓冲。-1VDC≒1.0A。U3A是设定输入过大起保护钳位作用。防止设定超过灯丝电流最大数值。控制器U4B和外围电路组成PI控制,经PWM IC输出脉宽调制信号。

图3:灯丝电路实例
该PI控制的传输函数可以通过下面简化图4来求。
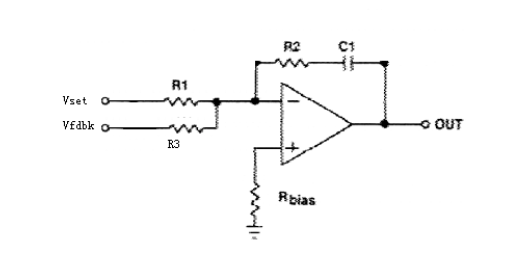
图4:灯丝误差调节器简化图
传输函数为

因为反馈值和设定值符号相反,实际上是求差;同时因幅值不等,因此积分和放大倍数相应有一定的倍数。在新的灯丝反馈电路中因反馈值预先放大,积分参数和比例参数一致。从该表达式中看到,是PI控制。
这个电路的阶跃响应如图5所示。

图5:灯丝电路阶跃响应曲线
CH1,D14阴极,灯丝电流设定电压;CH2,RMS IC U5PIN6,灯丝电流有效值反馈;CH3,U4BPIN7,误差积分。可以看到阶跃响应波形中有延迟,该延迟是因为RMS芯片有建立时间的。通过波形看到,设定不等于反馈。这通过积分电阻来调节。设定电阻为18K左右,而反馈为3K左右,这样积分常数就一致了。可以看到误差积分随时间增长;当有反馈时,积分减缓;反馈等于设定时,误差积分停止。
请看误差积分与PWM IC输出脉宽的关系。
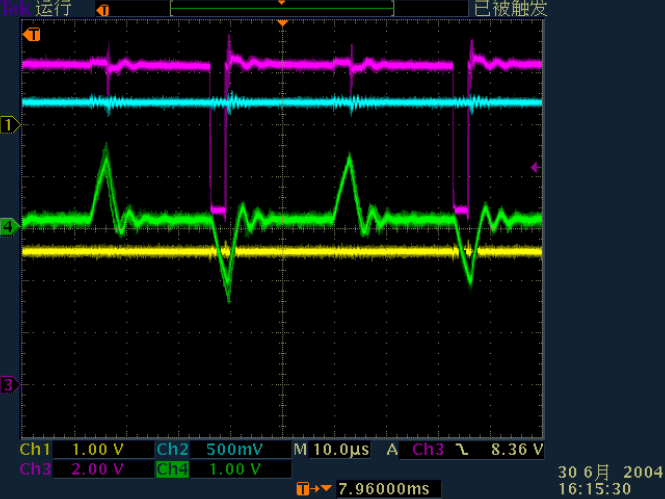
图6: STANDBY状态脉宽和电流关系
CH1,灯丝设定;CH2,灯丝反馈;CH3,脉宽;CH4,灯丝电流互感器波形。在standby状态,PWM脉宽为3us左右,电流近似线形上升和下降。而图7同本图,但是灯丝设定改为BOOST时的值5.3A。脉宽为5us左右。从而可以得出结论,脉宽宽,电流输出大。而图8反映了灯丝设定由standby到boost状态中过渡的情形。从CH4看,CH2的脉宽加宽,电流反馈的峰值加大。
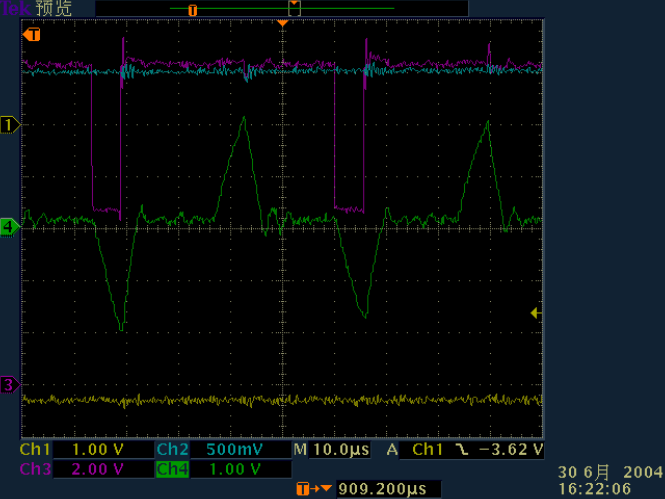
图7: BOOST电流和脉宽关系
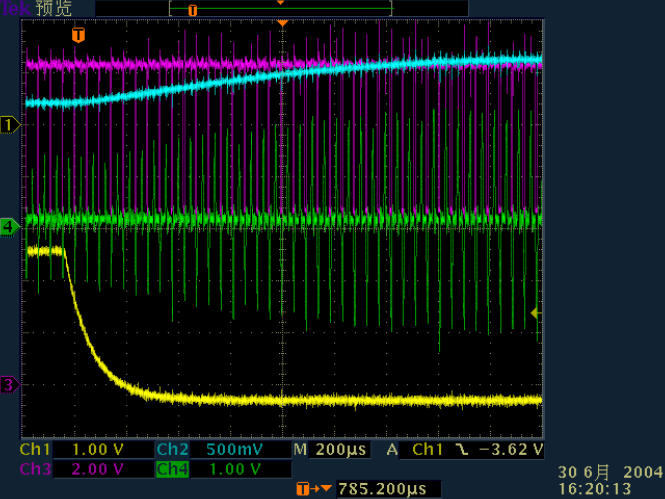
图8: STANDBY向BOOST电流转换波形
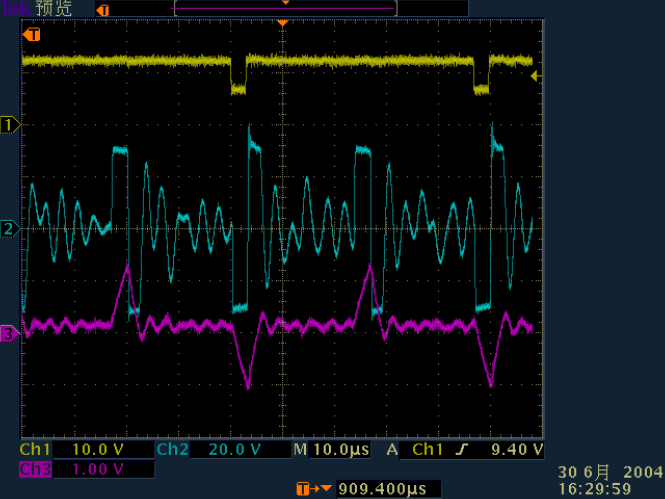
图9: Standby状态灯丝电流、脉宽和桥臂波形
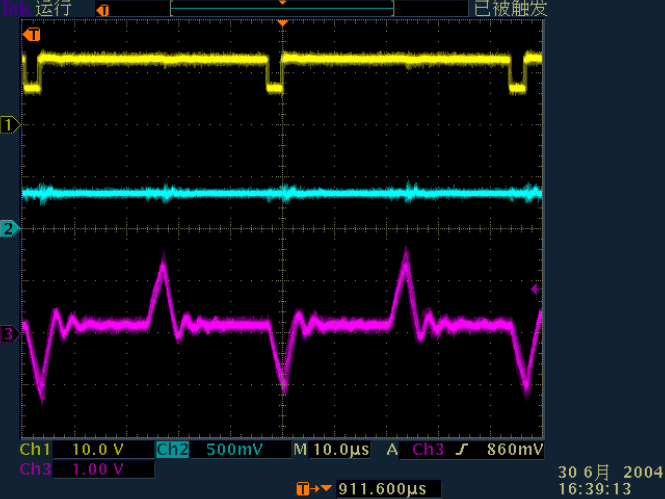
图10:灯丝在Standby状态脉宽、有效值、电流波形
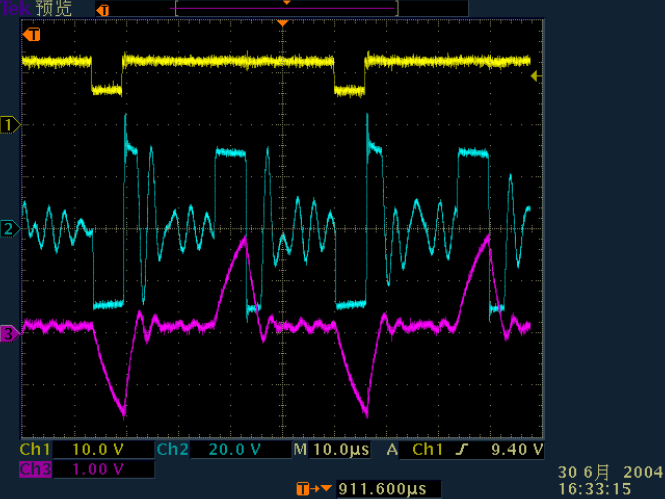
图11:Boost状态灯丝电流、脉宽和桥臂波形
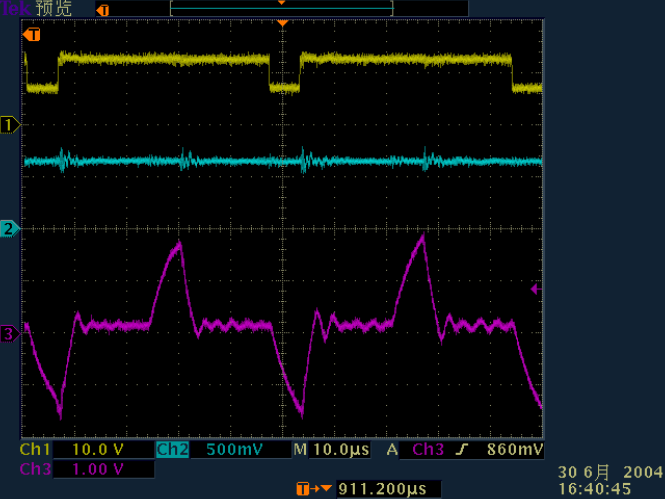
图12:灯丝在Boost状态脉宽、有效值、电流波形
基本上看到电流增加与脉宽是线形关系。脉宽与误差电压相关。误差电压范围在0.5-3.6VDC之间有效,对应占空比为0-100%。对应关系如图13所示。
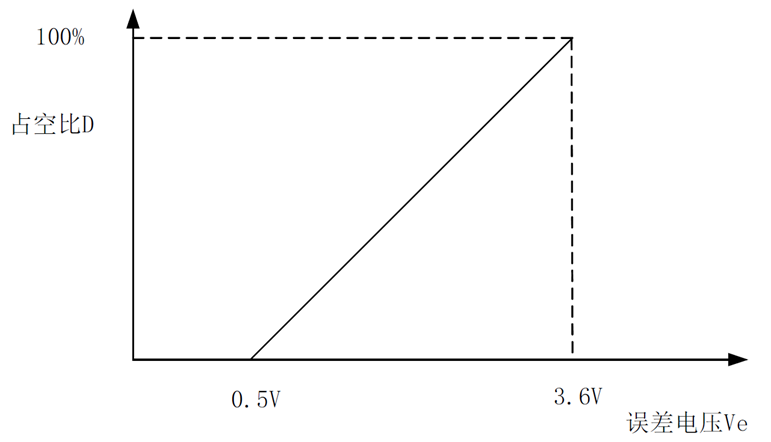
图13:脉宽与误差电压关系
下一章 高压主回路

















 1072
1072

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









