







映射的概念
简单概念
如果集合 X X X 的每一个元素 x x x 都按照某规律 f f f 与集合 Y Y Y 的某一个元素 y y y 对应,我们就说有一个映射,它定义于 X X X 并取值于 Y Y Y .
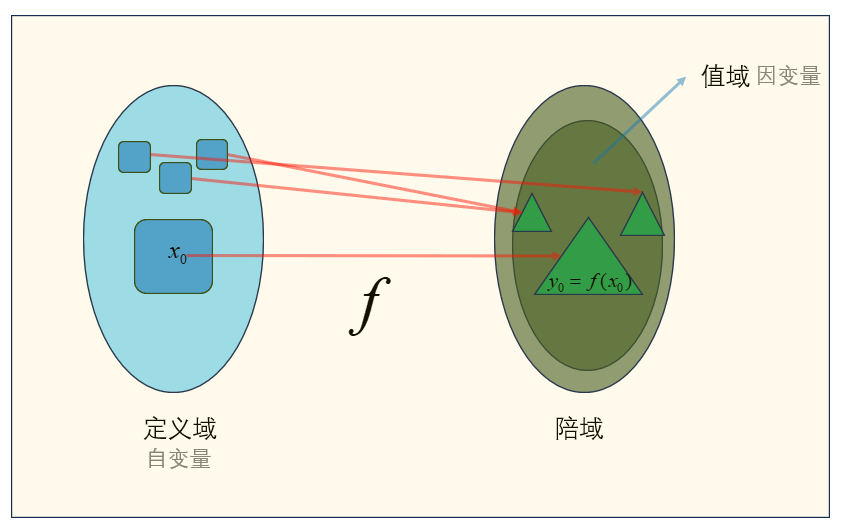
映射的值域定义为
f ( X ) : = { y ∈ Y ∣ ∃ x ( ( x ∈ X ) ∧ ( y = f ( x ) ) ) } f(X):=\{y\in Y|\exists x((x\in X)\wedge (y=f(x)))\} f(X):={y∈Y∣∃x((x∈X)∧(y=f(x)))}
在不同的领域,由于定义域 X X X 和陪域 Y Y Y 的组成元素不同,映射有着许许多多的实例名,如变换、射、算子、泛函、函数等。
映射的常用表达为 f : X → Y f:X\to Y f:X→Y
映射相等
如果映射 f 1 f_1 f1 和 f 2 f_2 f2 有相同的定义域 X X X,而且对于任何的 x ∈ X x\in X x∈X , 都有 f 1 ( x ) = f 2 ( x ) f_1(x)=f_2(x) f1(x)=f2(x) , 则称这两个映射相同或相等
对于映射 f : X → Y f:X\to Y f:X→Y , 可以将映射关系限制在 X X X 的子集 A A A 上,构成 f ∣ A : A → Y f|_A:A\to Y f∣A:A→Y , 在 A A A 上 , f ( x ) = f A ( x ) f(x)=f_A(x) f(x)=fA(x) .
也可以将映射关系延拓到 X X X 的超集 B B B上 , 构成 f ∣ B : B → Y f|^B:B\to Y f∣B:B→Y , 在 X X X 上, f ( x ) = f B ( x ) f(x)=f^B(x) f(x)=fB(x). 而在 C B X C_BX CBX 上 , f ∣ B f|^B f∣B 可以有其它定义.
映射是有方向的,从定义域集合到陪域集合。
映射的一些实例
【圆的周长公式和球的体积公式】 表达式 l = 2 π r l=2\pi r l=2πr 建立了映射 f : R + → R + f:\mathbb{R}^+\to \mathbb{R}^+ f:R+→R+ ,每个半径 r r r , 都映射到了一个周长 l = f ( r ) l=f(r) l=f(r) . 表达式 V = 4 3 π r 3 V=\frac{4}{3}\pi r^3 V=34πr3 建立了映射 f : R + → R + f:\mathbb{R}^+\to \mathbb{R}^+ f:R+→R+ ,每个半径 r r r , 都映射到了一个体积 V = f ( r ) V=f(r) V=f(r) .
【光速的常数映射】 设 X X X 是惯性坐标系的集合,映射 c : X → R c:X\to \mathbb{R} c:X→R 给出了惯性坐标系 x ∈ X x\in X x∈X 与相对于它测量的真空光速 c ( x ) c(x) c(x) 的对应关系. 事实上,根据实验事实,对于任意的 x ∈ X x\in X x∈X 都有 c ( X ) = c 0 c(X)=c_0 c(X)=c0 . 其中 c 0 c_0 c0 为固定的真空光速值.
【伽利略变换与一维洛伦兹变换】
{ x ′ = x − v t t ′ = t \begin{cases}x'=x-vt \\ t' = t\end{cases} {x′=x−vtt′=t 给出的映射 G : R 2 → R 2 G:\mathbb{R}^2\to \mathbb{R}^2 G:R2→R2 是经典的伽利略变换,它从一个惯性坐标系 ( x , t ) (x,t) (x,t) 变换到另一个惯性坐标系 ( x ′ , t ′ ) (x',t') (x′,t′) , 后者相对于前者以速度 v v v 运动.
{ x ′ = x − v t 1 − ( v c ) 2 t ′ = t − ( v c 2 ) x 1 − ( v c ) 2 \begin{cases}x'=\frac{x-vt}{\sqrt{1-(\frac{v}{c}})^2} \\ t' = \frac{t-(\frac{v}{c^2})x}{\sqrt{1-(\frac{v}{c}})^2}\end{cases} ⎩ ⎨ ⎧x′=1−(cv)2x−vtt′=1−(cv)2t−(c2v)x 给出的洛伦兹变换 L : R 2 → R 2 L:\mathbb{R}^2\to \mathbb{R}^2 L:R2→R2 起到了相同的作用,在狭义相对论中起基本作用.其中 c c c 是光速大小.
【投影映射】 第一投影 pr 1 : X 1 × X 2 → X 1 \text{pr}_1:X_1\times X_2\to X_1 pr1:X1×X2→X1 由对应关系 x 1 = pr 1 ( x 1 , x 2 ) x_1=\text{pr}_1(x_1,x_2) x1=pr1(x1,x2) 给出。 第二投影 pr 2 : X 1 × X 2 → X 2 \text{pr}_2:X_1\times X_2\to X_2 pr2:X1×X2→X2 由对应关系 x 2 = pr 1 ( x 1 , x 2 ) x_2=\text{pr}_1(x_1,x_2) x2=pr1(x1,x2) 给出。
【补集】 设 P ( M ) \mathcal{P}(M) P(M) 是集合 M M M 的全部子集的集合. 让每一个 A ∈ P ( M ) A\in \mathcal{P}(M) A∈P(M) 与集合 C M ( A ) ∈ P ( M ) C_M(A)\in \mathcal{P}(M) CM(A)∈P(M) 相对应. C M ( A ) C_M(A) CM(A) 就是我们前面提到的 A A A 的补集. 可见,补集运算 C M C_M CM 是一个从 P ( M ) \mathcal{P}(M) P(M) 到 P ( M ) \mathcal{P}(M) P(M) 本身的映射.
【特征函数】 设 E ⊂ M E\subset M E⊂M. 由表达式 χ E ( x ) = { 1 x ∈ E 0 x ∉ E \chi_E(x)=\begin{cases}1 & x\in E \\ 0 & x\notin E\end{cases} χE(x)={10x∈Ex∈/E 确定的映射 χ E : M → R \chi_E:M\to \mathbb{R} χE:M→R 被称为集合 E E E 的特征函数.
【泛函】 设 M ( X ; Y ) M(X;Y) M(X;Y) 是从集合 X X X 到集合 Y Y Y 的映射的集合,而 x 0 x_0 x0 是 X X X 的一个固定元素. 让每一个映射 f ∈ M ( X ; Y ) f\in M(X;Y) f∈M(X;Y) 都与该映射在 x 0 x_0 x0 上的取值 f ( x 0 ) ∈ Y f(x_0)\in Y f(x0)∈Y 相对应,从而定义了映射上的映射 F : M ( X ; Y ) → Y F:M(X;Y)\to Y F:M(X;Y)→Y. 特别地,如果 Y = R Y=\mathbb{R} Y=R , 则每个函数 f f f 都与一个实数 F ( f ) = f ( x 0 ) F(f)=f(x_0) F(f)=f(x0) 相对应, F F F 是定义在函数上的函数,这样的函数被称为泛函.
【测地线】 设 Γ \Gamma Γ 是曲面上连接两个固定点的曲线的集合. 可以让每一条曲线 γ ∈ Γ \gamma\in \Gamma γ∈Γ 与其长度相对应,从而得到映射 F : Γ → R F:\Gamma\to \mathbb{R} F:Γ→R . 人们在研究给定两点之间求最短曲线的问题时,常常要考虑这样的函数.
【平移算子】 设 M ( R , R ) M(\mathbb{R},\mathbb{R}) M(R,R) 是从 R \mathbb{R} R 到 R \mathbb{R} R 的所有实值函数的集合. 给定一个固定的偏移量 a a a , 让每个 f ∈ M ( R , R ) f\in M(\mathbb{R},\mathbb{R}) f∈M(R,R) 对应于一个新的函数 f a ∈ M ( R , R ) f_a\in M(\mathbb{R},\mathbb{R}) fa∈M(R,R) , 对应法则为 f a ( x ) = f ( x + a ) f_a(x)=f(x+a) fa(x)=f(x+a) . 这样生成的映射 A : M ( R , R ) → M ( R , R ) A:M(\mathbb{R},\mathbb{R})\to M(\mathbb{R},\mathbb{R}) A:M(R,R)→M(R,R) 称为 a a a 平移算子.平移算子生成 f f f 的平移 f a = A ( f ) f_a=A(f) fa=A(f),它也是定义在函数上的映射.
事实上,像收音机这样的接收装置也自带了算子 ,它们把电磁信号 f f f 转变为 声信号 f ^ = F ( f ) \hat f=F(f) f^=F(f)
【质点系统】 一个质点在空间中的位置由坐标 ( x , y , z ) (x,y,z) (x,y,z) 确定 . 所有坐标组成的集合可以看做 R 3 = R × R × R \mathbb{R}^3=\mathbb{R}\times \mathbb{R}\times \mathbb{R} R3=R×R×R .
在某一时刻 t t t , 质点的位置由 ( x ( t ) , y ( t ) , z ( t ) ) (x(t),y(t),z(t)) (x(t),y(t),z(t)) 表示. 由此,质点的运动过程可以看成是一个映射 γ : R t → R 3 \gamma:\mathbb{R}_t\to \mathbb{R}^3 γ:Rt→R3 , 由时间轴映射到三维空间.
如果一个系统由 n n n 个质点组成,那么它的构形可以由各质点的位置共同表出,即由有序的 3 n 3n 3n 个数 ( x 1 , y 1 , z 1 ; x 2 , y 2 , z 2 ; ⋯ ; x n , y n , z n ) (x_1,y_1,z_1;x_2,y_2,z_2;\cdots;x_n,y_n,z_n) (x1,y1,z1;x2,y2,z2;⋯;xn,yn,zn) 表出. 所有这样的有序的数的集合称为 n n n 质点系的构型空间. 它可以表示为 R 3 n = R 3 × ⋯ × R 3 \mathbb{R}^{3n}=\mathbb{R}^3\times \cdots \times \mathbb{R}^3 R3n=R3×⋯×R3 .
时间轴到质点系构形空间的映射 γ : R → R 3 n \gamma:\mathbb{R}\to \mathbb{R}^{3n} γ:R→R3n 对应着 n n n 质点系的运动.
【势能】 力学系统中的势能 U U U 与其质点的相互位置有关,即和系统的构形有关. 设 Q Q Q 是系统实际可能具有的构形的集合,每个构形 q ∈ Q q\in Q q∈Q 都对应着系统势能的某个值 U ( q ) U(q) U(q) . 因此,势能可以表示为映射 U : Q → R U:Q\to \mathbb{R} U:Q→R .
【机械能】 n n n 质点系的动能 K K K 与各质点的速度有关. 而质点系的总机械能 E = K + U E=K+U E=K+U , 既与质点系的构形 q q q 有关,又与各质点的速度数组 v v v 有关. v v v 也由 n n n 个三维向量构成,也取值于 R 3 n \mathbb{R}^{3n} R3n. 与质点系状态相对应的序偶 ( q , v ) (q,v) (q,v) 组成了 R 6 \mathbb{R}^6 R6 的一个子集 Φ \Phi Φ ,称为 n n n 质点系的相空间.
由此,系统的总机械能可以表示为映射 E : Φ → R E:\Phi\to \mathbb{R} E:Φ→R.特别地,如果系统的机械能守恒,则 E E E 在系统相空间的所有状态下都取相同的值 E 0 ∈ R E_0\in \mathbb{R} E0∈R
映射的简单分类
满射
当 f ( X ) = Y f(X)=Y f(X)=Y 时,映射 f : X → Y f:X\to Y f:X→Y 称为满射,又称到上映射.
映满
单射
对于任意的 x 1 , x 2 ∈ X x_1,x_2\in X x1,x2∈X , ( f ( x 1 ) = f ( x 2 ) ) ⇒ ( x 1 = x 2 ) (f(x_1)=f(x_2))\Rightarrow (x_1=x_2) (f(x1)=f(x2))⇒(x1=x2) 成立
不同元素具有不同的像
双射与互逆映射
既是单射又是满射的映射称为双射.
对于单射 f : X → Y f:X\to Y f:X→Y ,新映射 g : X → f ( X ) g:X\to f(X) g:X→f(X) 即为双射.
对于双射 f : X → Y f:X\to Y f:X→Y ,每一个 x ∈ X x\in X x∈X 都与唯一的的 y ∈ Y y\in Y y∈Y 对应,每一个 y ∈ Y y\in Y y∈Y 都与唯一的的 x ∈ X x\in X x∈X 对应.
也就是说 , x x x 与 y y y 一一对应.
对于双射,对应关系为 x = f − 1 ( y ) x=f^{-1}(y) x=f−1(y)的映射 f − 1 : Y → X f^{-1}:Y\to X f−1:Y→X 也是符合定义的,通常称为 f f f 的逆映射.
逆映射也是双射,而且逆映射的逆映射 ( f − 1 ) − 1 : X → Y (f^{-1})^{-1}:X\to Y (f−1)−1:X→Y 就是本身 f : X → Y f:X\to Y f:X→Y.
映射的复合与互逆映射
概念
映射的复合运算,一方面可以用于生成丰富的新函数,另一方面可以用于分解复杂函数.
设有映射 f : X → Y f:X\to Y f:X→Y 和 g : Y → Z g:Y\to Z g:Y→Z , 这时可以构造一个新的映射 g ∘ f : X → Z g\circ f:X\to Z g∘f:X→Z , 对应关系由 ( g ∘ f ) ( x ) : = g ( f ( x ) ) (g\circ f)(x):=g(f(x)) (g∘f)(x):=g(f(x)) 确定. 有着这样多层映射关系的映射称为复合映射.
映射可以多层复合.
复合的结合律
h ∘ ( g ∘ f ) = ( h ∘ g ) ∘ f h\circ (g\circ f)=(h\circ g)\circ f h∘(g∘f)=(h∘g)∘f
如果复合映射 f n ∘ f n − 1 ⋯ f 2 ∘ f 1 f_n\circ f_{n-1}\cdots f_2\circ f_1 fn∘fn−1⋯f2∘f1 中所有的单个映射都相同且为 f f f ,就可以把它简写为 f n f^n fn
常见的迭代过程 x n = f ( x n − 1 ) x_n=f(x_{n-1}) xn=f(xn−1) 就可以看作一个 f n f_n fn
复合映射 g ∘ f g\circ f g∘f 存在 , f ∘ g f\circ g f∘g 可能不存在,二者也就没有必然的相等关系,故交换律不存在
恒等映射
满足对应关系 f ( x ) = x f(x)=x f(x)=x 的映射 f : X → X f:X\to X f:X→X 称为恒等映射,记 e X e_X eX 为集合 X X X 上的恒等映射. 恒等映射是双射.
( g ∘ f = e X ) ⇒ ( g 是满射 ) ∧ ( f 是单射 ) (g\circ f=e_X)\Rightarrow (g是满射)\wedge(f是单射) (g∘f=eX)⇒(g是满射)∧(f是单射)
**证明:**设 g ∘ f = e X g\circ f=e_X g∘f=eX , f : X → Y f:X\to Y f:X→Y , g : Y → X g:Y\to X g:Y→X .
X = e X ( X ) = ( g ∘ f ) ( X ) = g ( f ( X ) ) ⊂ g ( Y ) X=e_X(X)=(g\circ f)(X)=g(f(X))\subset g(Y) X=eX(X)=(g∘f)(X)=g(f(X))⊂g(Y) . 故 X = g ( Y ) X=g(Y) X=g(Y) ,即 g g g 是满射
设 x 1 ≠ x 2 ∈ X x_1\ne x_2\in X x1=x2∈X , 则
( x 1 ≠ x 2 ) ⇒ ( g ∘ f ) ( x 1 ) ≠ ( g ∘ f ) ( x 2 ) ⇒ g ( f ( x 1 ) ) ≠ g ( f ( x 2 ) ) ⇒ f ( x 1 ) ≠ f ( x 2 ) (x_1\ne x_2)\Rightarrow (g\circ f)(x_1)\ne (g\circ f)(x_2)\Rightarrow g(f(x_1))\ne g(f(x_2))\Rightarrow f(x_1)\ne f(x_2) (x1=x2)⇒(g∘f)(x1)=(g∘f)(x2)⇒g(f(x1))=g(f(x2))⇒f(x1)=f(x2) .
故 f f f 是单射
映射 f : X → Y f:X\to Y f:X→Y , g : Y → X g:Y\to X g:Y→X 是互逆的双射 ⇔ \Leftrightarrow ⇔ g ∘ f = e X , f ∘ g = e Y g\circ f=e_X,f\circ g=e_Y g∘f=eX,f∘g=eY
假设映射 f : X → Y f:X\to Y f:X→Y , g : Y → X g:Y\to X g:Y→X 是互逆的双射.
( g ∘ f ) ( x ) = g ( f ( x ) ) = g ( y ) = x , ( f ∘ g ) ( y ) = f ( g ( y ) ) = f ( x ) = y (g\circ f)(x)=g(f(x))=g(y)=x,(f\circ g)(y)=f(g(y))=f(x)=y (g∘f)(x)=g(f(x))=g(y)=x,(f∘g)(y)=f(g(y))=f(x)=y
假设 g ∘ f = e X , f ∘ g = e Y g\circ f=e_X,f\circ g=e_Y g∘f=eX,f∘g=eY ,
则 ( g 是满射 ) ∧ ( f 是单射 ) ∧ ( f 是满射 ) ∧ ( g 是单射 ) (g是满射)\wedge(f是单射)\wedge (f是满射)\wedge(g是单射) (g是满射)∧(f是单射)∧(f是满射)∧(g是单射) , 即 f , g f,g f,g 都是双射
且 ( g ∘ f ) ( x ) = g ( f ( x ) ) = x = g ( y ) , ( f ∘ g ) ( y ) = f ( g ( y ) ) = y = f ( x ) (g\circ f)(x)=g(f(x))=x=g(y),(f\circ g)(y)=f(g(y))=y=f(x) (g∘f)(x)=g(f(x))=x=g(y),(f∘g)(y)=f(g(y))=y=f(x) , 即 f f f 与 g g g 互逆
关系与函数图像
前面映射概念的描述其实是一种反应其本质的相对动态的描述,从现代标准看,其实并不能称之为定义,因为它使用到了一个与映射等价的概念——对应.
关系
序偶 ( x , y ) (x,y) (x,y) 的任何集合称为关系 R \mathcal{R} R .
组成 R \mathcal{R} R 的一切序偶的第一坐标组成的集合 X X X 称为 R \mathcal{R} R 的定义域,第二坐标组成的集合 Y Y Y 称为 R \mathcal{R} R 的值域
因此,可以把关系 R \mathcal{R} R 理解为 X × Y X\times Y X×Y 的子集.
常常把 ( x , y ) ∈ R (x,y)\in \mathcal{R} (x,y)∈R 写作 x R y x\mathcal{R}y xRy , 并称 x x x 与 y y y 具有关系 R \mathcal{R} R.
如果 R ∈ X 2 \mathcal{R}\in X^2 R∈X2, 就说在 X X X 上给定了关系 R \mathcal{R} R .
关系的一些实例
【相等关系】 笛卡尔积 X 2 X^2 X2 的对角线 Δ = { ( a , b ) ∈ X 2 ∣ a = b } \Delta=\{(a,b)\in X^2|a=b\} Δ={(a,b)∈X2∣a=b} 给出 X X X 上的相等关系. 其实 a Δ b a\Delta b aΔb 就表示 ( a , b ) ∈ Δ ⇒ a = b (a,b)\in \Delta\Rightarrow a=b (a,b)∈Δ⇒a=b .
【等价关系】 设 X X X 是平面上的直线的集合. 如果直线 b ∈ X b\in X b∈X 平行于直线 a ∈ X a\in X a∈X,我们就认为这两条直线之间具有关系 R \mathcal{R} R,即构造一个集合,使得所有平行的直线 a , b a,b a,b 组成的序偶 ( a , b ) ∈ R (a,b)\in \mathcal{R} (a,b)∈R .显然,这样就从 X 2 X^2 X2 中划分出了一个平行关系 R \mathcal{R} R .
根据几何知识,直线的平行关系 R \mathcal{R} R 满足下面的三个性质:
- 自反性: a R a a\mathcal{R} a aRa
- 对称性: a R b ⇒ b R a a\mathcal{R}b\Rightarrow b\mathcal{R}a aRb⇒bRa
- 传递性: ( a R b ) ∧ ( b R c ) ⇒ a R c (a\mathcal{R}b)\wedge(b\mathcal{R}c)\Rightarrow a\mathcal{R}c (aRb)∧(bRc)⇒aRc
任何具有自反性、对称性、传递性的关系 R \mathcal{R} R 通常称为等价关系,
对于等价关系,我们把 a R b a\mathcal{R}b aRb 写作 a ∼ b a\sim b a∼b ,并说 a a a 与 b b b 等价
【偏序关系】 设 M M M 是某集合, X = P ( M ) X=\mathcal{P}(M) X=P(M) 的任意两个元素 a a a 与 b b b 之间,只有以下三种可能: a ⊂ b a\subset b a⊂b 或 b ⊂ a b\subset a b⊂a 或 ¬ ( ( a ⊂ b ) ∧ ( b ⊂ a ) ) \neg ((a\subset b)\wedge(b\subset a)) ¬((a⊂b)∧(b⊂a))
可以定义包含关系 a R b : = ( a ⊂ b ) a\mathcal{R}b:=(a\subset b) aRb:=(a⊂b) ,这个关系显然具有以下性质:
- 自反性: a R a a\mathcal{R} a aRa
- 反对称性: ( a R b ) ∧ ( b R a ) ⇒ a = b (a\mathcal{R}b)\wedge (b\mathcal{R}a)\Rightarrow a=b (aRb)∧(bRa)⇒a=b
- 传递性: ( a R b ) ∧ ( b R c ) ⇒ a R c (a\mathcal{R}b)\wedge(b\mathcal{R}c)\Rightarrow a\mathcal{R}c (aRb)∧(bRc)⇒aRc
任何具有自反性、反对称性、传递性的关系 R \mathcal{R} R 通常称为偏序关系,
对于偏序关系,我们把 a R b a\mathcal{R}b aRb 写作 a ⪯ b a\preceq b a⪯b ,并说 b b b 在 a a a 之后 .
【序关系】 如果对于集合 X X X 和 X X X 上的关系 R \mathcal{R} R 有
- 任意两元素可比,即 ∀ a ∀ b ( ( a R b ) ∨ ( b R a ) ) \forall a\forall b((a\mathcal{R}b)\vee(b\mathcal{R}a)) ∀a∀b((aRb)∨(bRa))
- R \mathcal{R} R是偏序
那么称 R \mathcal{R} R 为序关系. 定义了序关系的集合 X X X 称为线性序集.
函数关系
满足 ( x R y 1 ) ∧ ( x R y 2 ) ⇒ ( y 1 = y 2 ) (x\mathcal{R}y_1)\wedge(x\mathcal{R}y_2)\Rightarrow (y_1=y_2) (xRy1)∧(xRy2)⇒(y1=y2) 的关系 R \mathcal{R} R 称为函数关系. 也就是说每一个 x x x 有唯一的 y y y 与其具有关系 R \mathcal{R} R .
函数关系一般可以用 f f f 表示, x f y xfy xfy 通常记作 y = f ( x ) y=f(x) y=f(x)
{ ( x , y ) ∣ y = f ( x ) } \{(x,y)|y=f(x)\} {(x,y)∣y=f(x)} 是 R 2 \mathbb{R}^2 R2 的子集,可以将其描点画于平面坐标系中,称之为函数图像.















 3596
3596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









