






深度学习目标检测中构建基于YOLOv8和PyQt的车流量检测统计系统,构建到车辆检测、分类、计数、测速以及车牌识别等功能。
YOLOv8+pyqt车流量检测统计系统
Python语言

需要装CUDA电脑需要英伟达gpu
本机测试win10+Python3.8+Python包+CUDA11.1+pytorch—gpu1.9.0
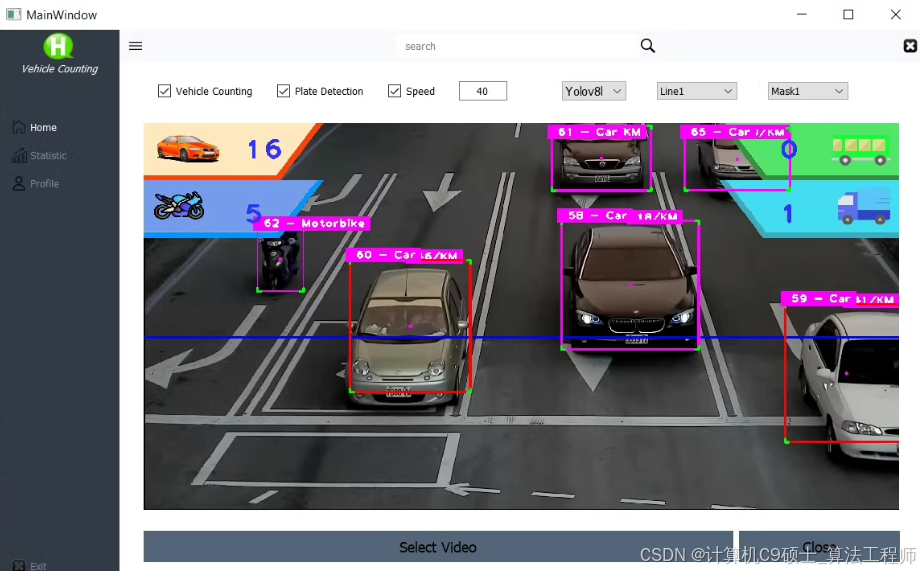
实现功能:
车辆检测:实时检测不同类型的车辆,包括:汽车,卡车,公共汽车,摩托车。
车流量统计:对四种类型车辆实时计数,并生成统计信息报告;
车辆测速:用于车速估计;
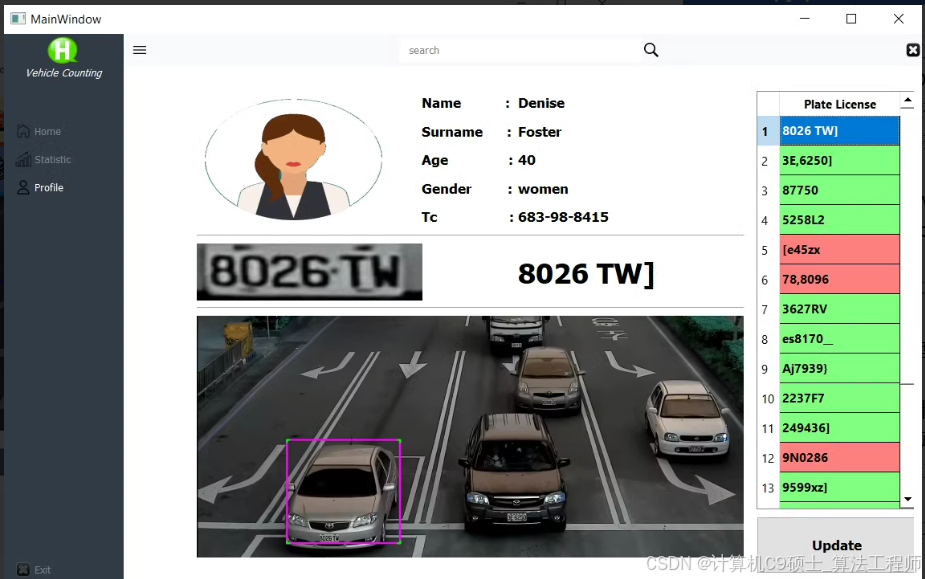
车牌识别:实时车牌检测与识别,并对OCR车牌信息进行提取,点击车牌获取对应车主信息;
实现一个基于YOLOv8和PyQt的车流量检测统计系统,涉及到车辆检测、分类、计数、测速以及车牌识别等功能。下面是一个高层次的设计思路和具体实现步骤。
1. 环境准备
首先确保你的环境满足以下要求:
- 操作系统:Windows 10
- Python版本:3.8
- CUDA版本:11.1
- PyTorch版本:GPU支持的1.9.0
- 其他依赖包:
opencv-python,ultralytics,pytesseract,torchvision,PyQt5
你可以通过以下命令安装必要的Python包(假设你已经正确配置了CUDA环境):
pip install torch==1.9.0+cu111 torchvision==0.10.0+cu111 torchaudio===0.9.0 -f https://download.pytorch.org/whl/torch_stable.html
pip install opencv-python ultralytics pytesseract PyQt5
2. 车辆检测与分类
使用YOLOv8进行车辆检测和分类。首先,加载预训练模型或在特定数据集上微调模型以识别汽车、卡车、公共汽车和摩托车。
加载YOLOv8模型
from ultralytics import YOLO
model = YOLO('yolov8n.pt') # 或者加载针对车辆优化的权重
3. 车流量统计
为了统计车流量,你需要定义一个区域作为检测区,并对穿越该区域的车辆进行计数。可以使用帧差分技术或深度学习方法来追踪车辆移动。
示例代码
class VehicleCounter:
def __init__(self, line):
self.line = line
self.counts = {'car': 0, 'truck': 0, 'bus': 0, 'motorcycle': 0}
def update(self, detections):
for det in detections:
if self._crossed_line(det['bbox']):
self.counts[det['label']] += 1
def _crossed_line(self, bbox):
# 判断车辆是否穿过线
pass
4. 车辆测速
可以通过计算车辆在连续帧之间的位移来估计速度。需要知道摄像头视角下的实际距离比例。
5. 车牌识别
使用OCR技术(如Tesseract)从图像中提取车牌信息。可以先用YOLOv8定位车牌位置,然后用Tesseract识别字符。
import cv2
import pytesseract
def recognize_license_plate(image, plate_bbox):
x, y, w, h = plate_bbox
plate_img = image[y:y+h, x:x+w]
config = '--oem 3 --psm 6'
text = pytesseract.image_to_string(plate_img, config=config)
return text.strip()
6. PyQT界面设计
创建一个简单的GUI来展示实时视频流、检测结果、统计数据等。
from PyQt5.QtWidgets import QApplication, QLabel, QVBoxLayout, QWidget
from PyQt5.QtGui import QImage, QPixmap
from PyQt5.QtCore import QTimer
import sys
class MainWindow(QWidget):
def __init__(self):
super().__init__()
self.initUI()
self.timer = QTimer()
self.timer.timeout.connect(self.update_frame)
self.timer.start(20) # 每20ms更新一帧
def initUI(self):
layout = QVBoxLayout()
self.video_label = QLabel()
layout.addWidget(self.video_label)
self.setLayout(layout)
def update_frame(self):
ret, frame = cap.read()
if ret:
# 处理帧并显示
self.display_image(frame)
def display_image(self, img):
qformat = QImage.Format_Indexed8
if len(img.shape) == 3: # [0]=rows, [1]=cols, [2]=channels
if img.shape[2] == 4:
qformat = QImage.Format_RGBA8888
else:
qformat = QImage.Format_RGB888
outImage = QImage(img, img.shape[1], img.shape[0], img.strides[0], qformat)
self.video_label.setPixmap(QPixmap.fromImage(outImage))
if __name__ == '__main__':
app = QApplication(sys.argv)
mainWindow = MainWindow()
mainWindow.show()
sys.exit(app.exec_())
7. 集成所有功能
将上述各个部分集成到一起,形成一个完整的应用。注意处理多线程问题,避免阻塞主界面。
这个框架提供了一个基本的指南,根据实际情况可能需要调整和扩展,比如更复杂的车辆跟踪算法、更精确的速度测量方法以及更高效的车牌识别策略。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









