






相机选型解析
应用场景
假设对一个精密零件的表面进行瑕疵检测,零件尺寸为50mm×40mm,要求的检测精度为0.01mm。检测过程中,零件会放置在传送带上以一定的速度(如0.5m/s)移动。
1.确定产品尺寸
如 50mm×40mm
2.确定视野
根据零件尺寸,估算视野大小。留出一定的余量,视野可以设置为零件尺寸的1.2倍左右,即60mm×50mm
3.确定检测精度 (一般客户提出检测精度要求)
对目标物体进行检测和识别的准确性
公差与实际尺寸的误差范围 一般检测精度为公差的 1/10
如公差0.1 检测精度为0.01
4.确定分辨率
根据检测精度和视野大小计算分辨率
分辨率至少应为(60/0.01)×(50/0.01)=6000×5000,即约3000万像素。 在实际应用中,考虑到相机的实际分辨率和图像处理的需求,通常会选择更高分辨率的相机,如2000万像素或更高
5.确定相机芯片类型
由于零件在传送带上移动,且检测精度要求较高,因此优先考虑CCD相机。CCD相机在成像质量和信噪比方面通常优于CMOS相机
6.确定线阵或面阵:
由于零件是二维的,且需要一次性拍摄整个表面,因此选择面阵相机更为合适。
线阵相机主要用于连续材料的扫描检测,如布料、纸张等
7.确定帧率
根据传送带的速度和视野大小,计算出所需的相机帧率
如果传送带速度为0.5m/s,视野为60mm×50mm,则相机每秒需要拍摄至少(0.5/0.06)×(0.5/0.05)=83.333帧图像才能确保不遗漏任何细节
8.确定曝光时间
曝光时间范围 :1us(微秒)-10s,常见相机的最小曝光时间为几十个us
最大曝光时间(us)≤单像素精度(mm/pixel)÷速度(m/s) *1000 若曝光时间大于该值,拍摄图像会出现模糊和拖影
单像素精度(检测精度) = 视野范围(FOV)/ 相机分辨率
最大曝光时间 = 0.01/0.5*1000 = 20us
9.确定接口
根据系统架构和传输距离选择合适的相机接口。
常用的接口有GigE、Camera Link、USB3.0 CoaXPress接口。
GigE接口基于以太网标准,传输距离远且支持多台相机同时使用;
Camera Link接口传输速度快但成本较高;
USB3.0接口则兼顾了传输速度和成本。
CoaXPress接口的特点主要包括高速传输、长距离传输、易于安装、良好的兼容性
10.确定颜色
根据需要处理的信息是否与图像颜色有关来选择彩色相机或黑白相机。
黑白相机在相同分辨率下精度更高,尤其在看图像边缘时效果更好。
11.确定其他因素
品牌与价格:在参数相同的情况下,不同品牌的相机价格可能差异较大。因此,在选择相机时还需要考虑品牌信誉、售后服务和性价比等因素。
光源与镜头:合适的光源和镜头对于提高图像质量至关重要。在选择相机时还需要考虑如何与光源和镜头进行匹配以确保最佳的检测效果
综上所述,可以选择一台高分辨率(如2000万像素)、帧率(如100fps以上)、面阵相机 ,最大曝光时间20us
根据以上条件去网站选型
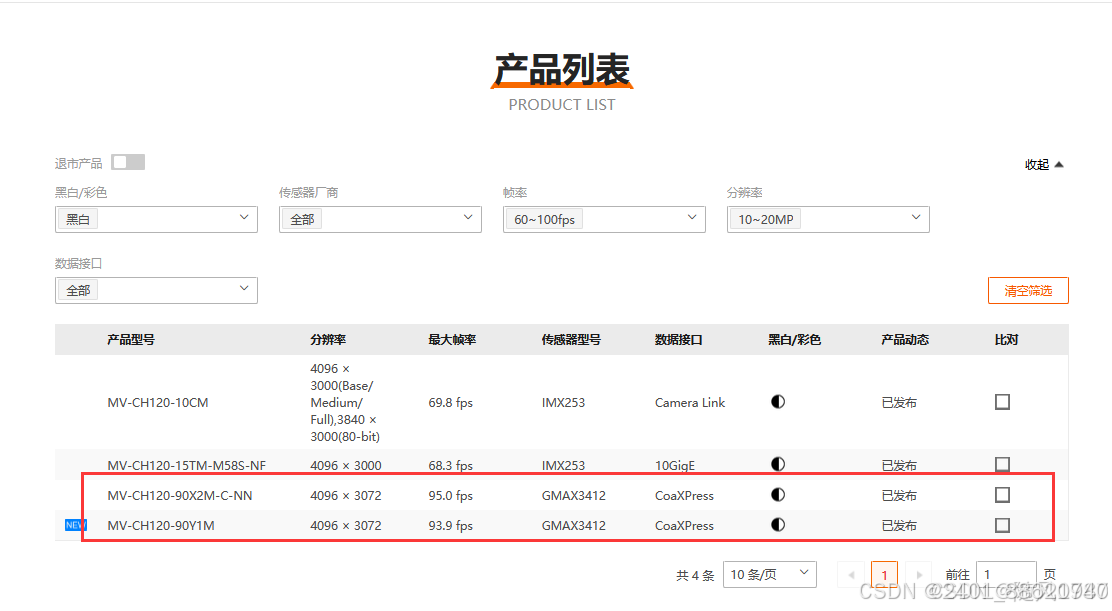
海康机器人-机器视觉产品页
镜头选型解析
1.确定镜头靶面尺寸(镜头的靶面尺寸大于或等于相机靶面的尺寸,否则画面四个角形成暗影或黑角,影响成像质量)
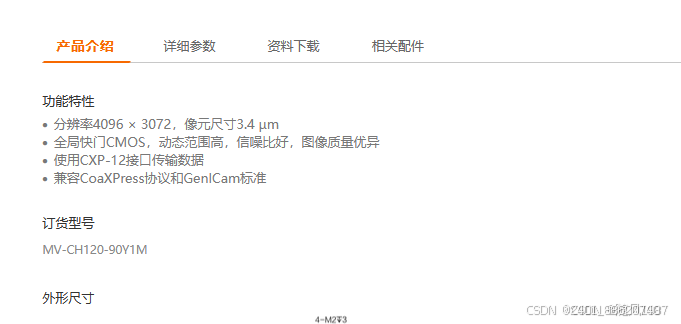
当相机选型完毕后 能确定相机的像元尺寸,分辨率。
相机靶面尺寸 = 像元尺寸*分辨率
相机靶面尺寸(长边) = 4096*3.4um =13.926mm
相机靶面尺寸(短边) = 3072*3.4um =10.444mm
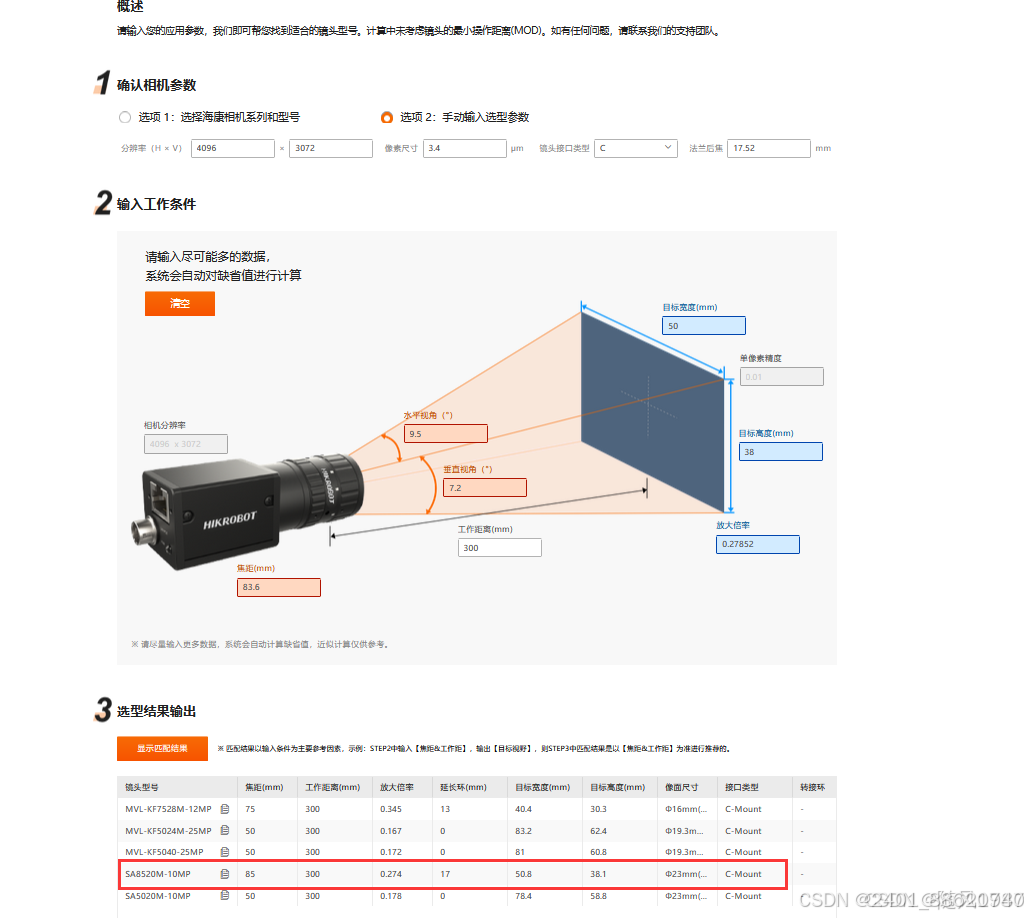
镜头靶面尺寸 要大于等于相机靶面尺寸 故 至少是13.926mm x10.444mm
2.确定镜头放大倍率 (镜头如何放大被摄物体在图像传感器上成像的尺寸比例)
放大倍率:sensor短边(长边)(镜头靶面尺寸短边(场边))÷ 视野短边(长边)
13.926mm ÷ 50mm= 0.27852mm
3.确定工作距离:(镜头前端到被摄物体的距离)
通常受到实际应用环境的限制,如机械结构、空间布局等。在选型过程中,往往需要先根据这些限制条件来确定一个大致的工作距离范围。) 比如 工作距离 为 300mm
4.确定焦距
焦距f=工作距离×放大倍率,所以f=0.1035 × 300= 31.05mm
焦距f = 300mm × 0.27852mm ≈ 83.556mm
海康机器人-机器视觉产品页 镜头选型页
总结选型结果:
相机选择
![]()
镜头选择
![]()
常见问题 选型
数码相机


















 3194
3194

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









