






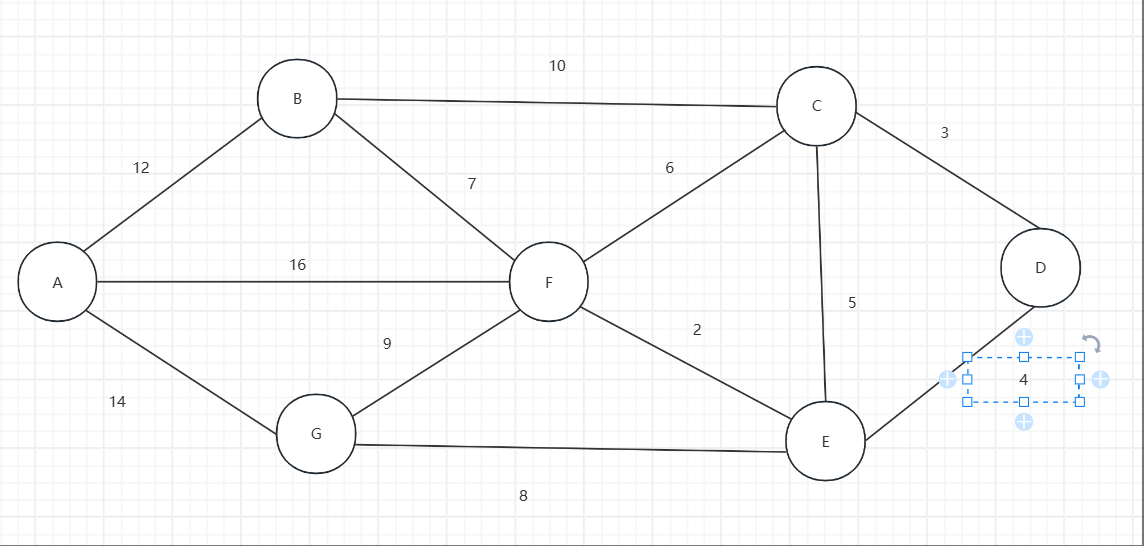
最短路径
最短路径是指在一个图(Graph)中,从一个顶点(Vertex)到另一个顶点之间经过的边的权重和最小 的路径。
这里的“权重”通常指的是边的某种度量值,比如距离、时间、成本等,但在最短路径问题中, 通常假设这些权重都是非负的。
最短路径问题是图论中的一个基本问题,它要求找到图中两个顶点之间的最短路径。这个问题在多个领 域都有广泛的应用,比如网络路由、城市规划、地理信息系统(GIS)、社交网络分析等。
迪杰斯特拉算法
-
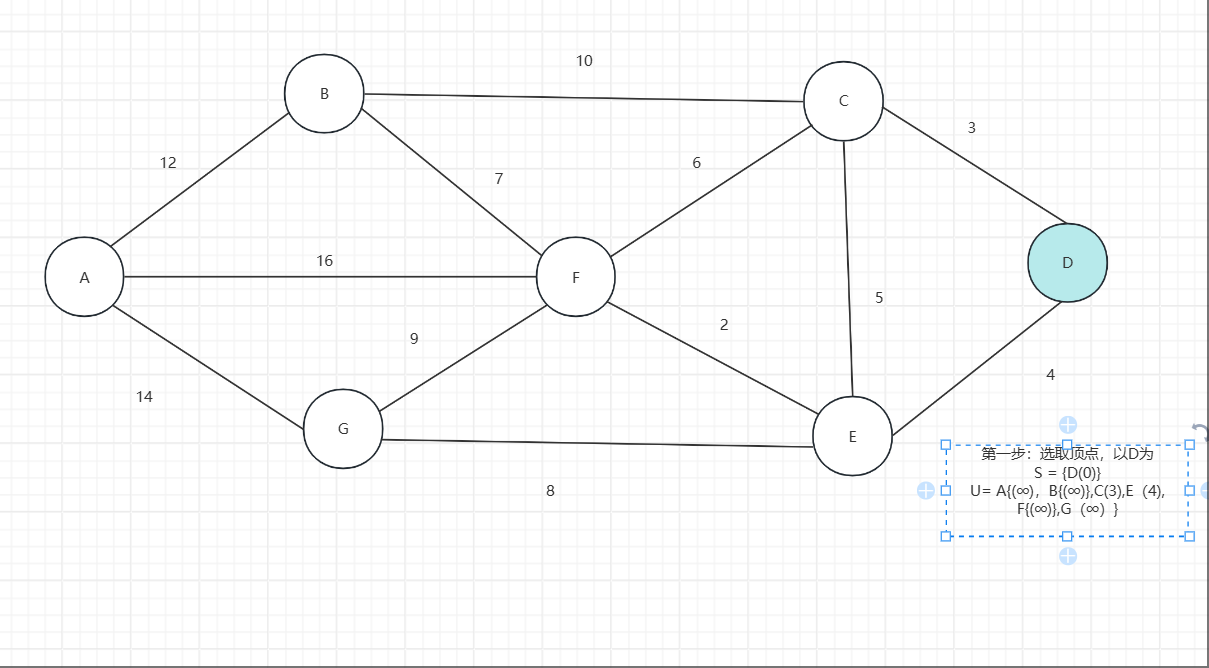
需要指定一个起点D(即从顶点D开始计算)。
-
引进两个数组S和U。(互补)
- S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),
- U 则是记录还未求出最短路径的顶点(以及该顶点到起点D的距离)
-
初始时,数组S中只有起点D;(自己到自己认为是0);
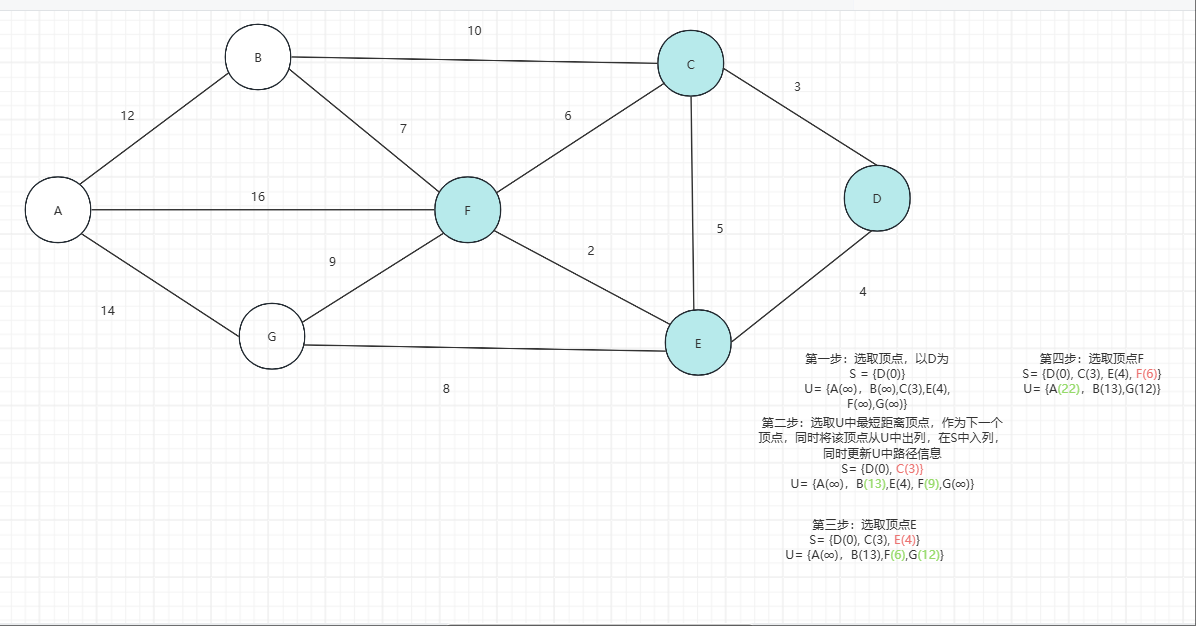
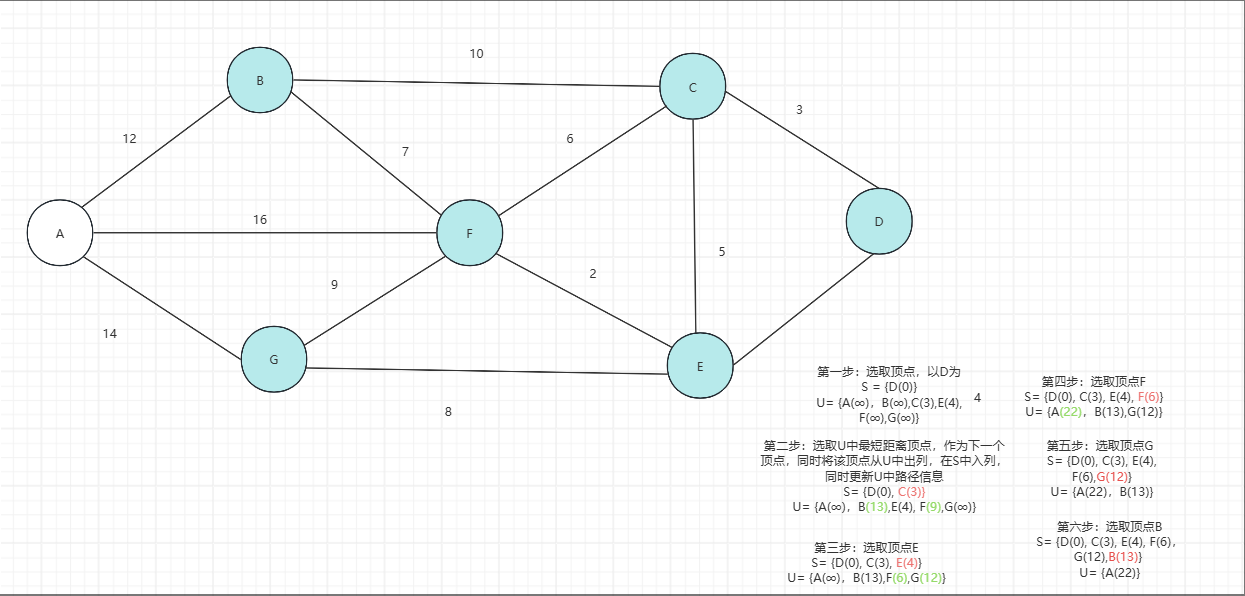
示例
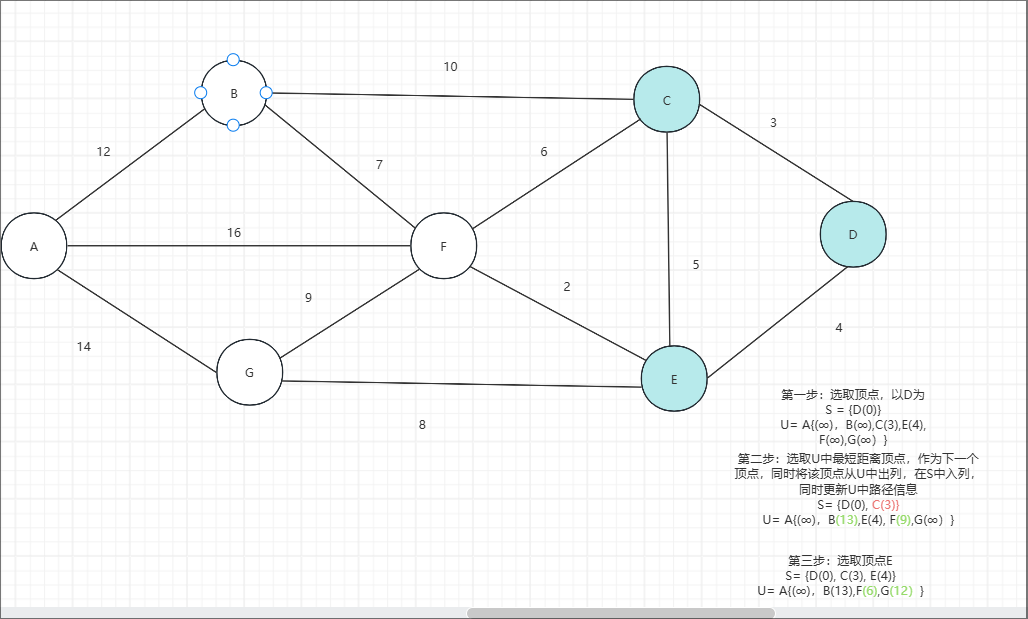
选取顶点(计算邻接点最短路径,非邻接点举例用∞表示)
选取U中最短距离顶点,作为下一个顶点,同时将该顶点从U中出列,在S中入列,同时更新U中路 径信息
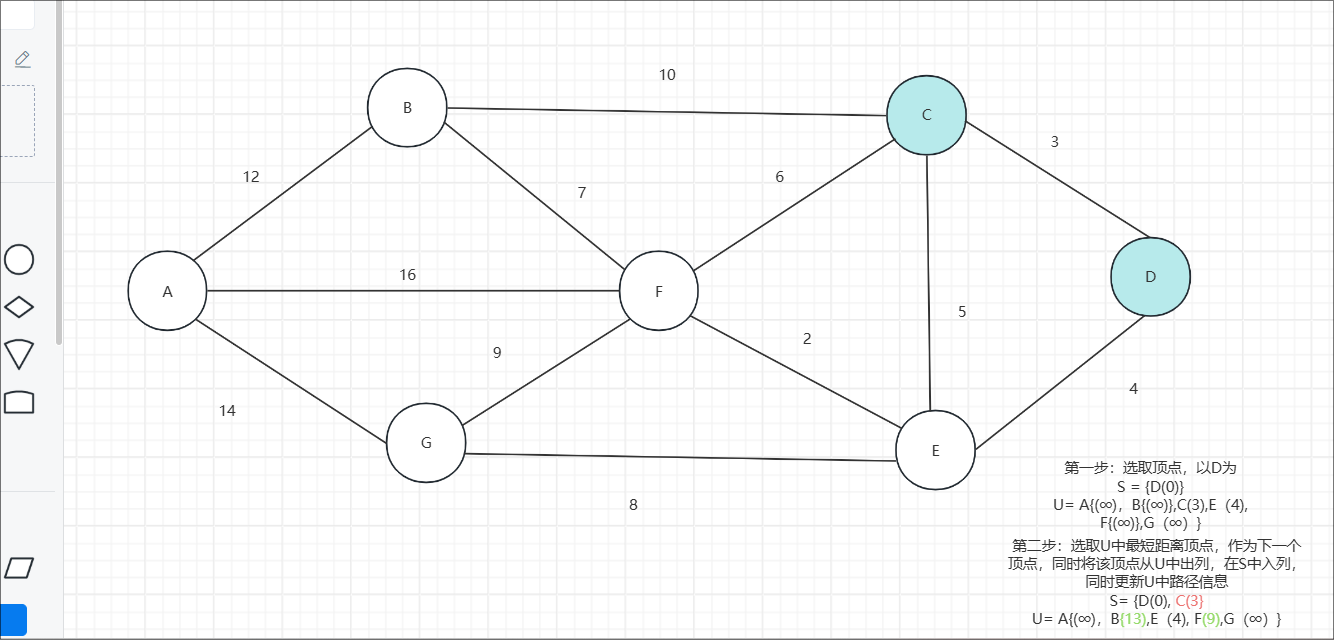
选取顶点E
选取顶点F
选取顶点G
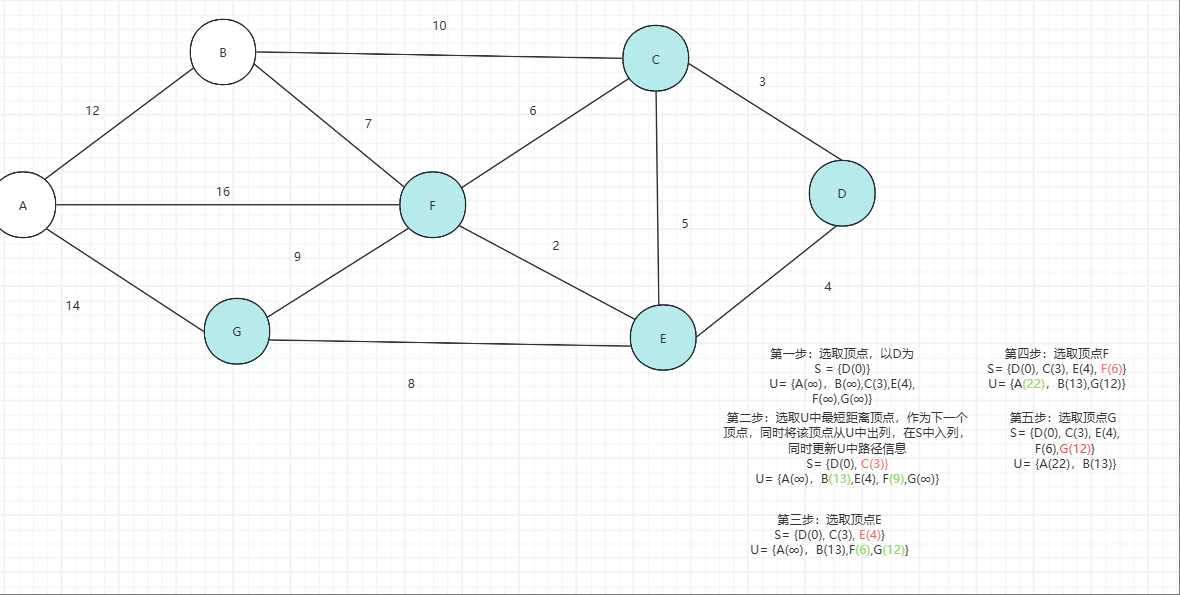
选取顶点B
F%E5%BE%84%5C7.png&pos_id=img-QsfehnZB-1747289507913)
选取顶点A
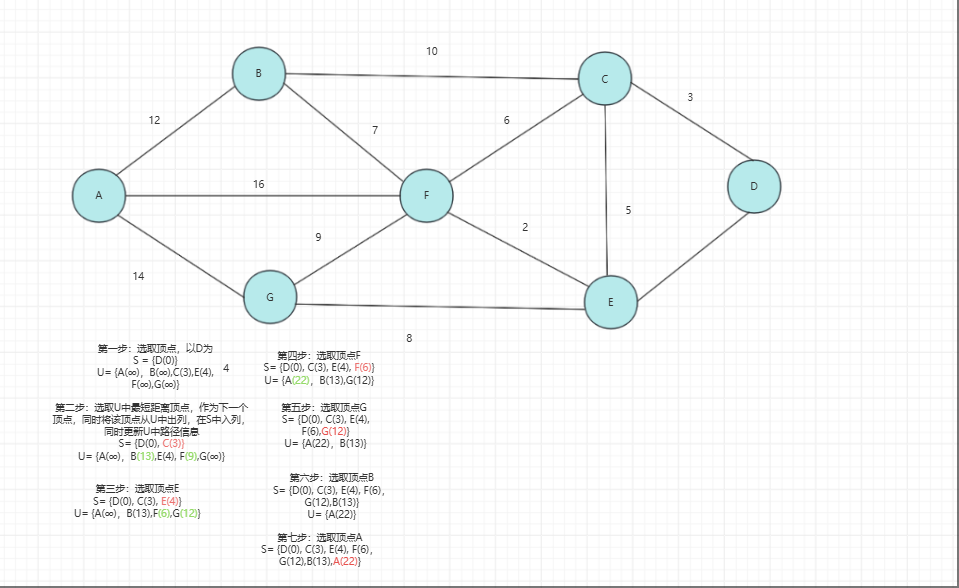
此时,起点D到各个顶点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。
#include <iostream>
using namespace std;
#include <vector>
// 定义边
typedef struct Node
{
int weight; /// 边的权重
int vertex; // 下一个顶点(邻接点)的值
struct Node *next;
// 下一条顶点(如果当前顶点没有更多的邻接点,则此指针为NULL)
} Node;
// 定义图
typedef struct Graph
{
int numVertices; // 顶点数
Node **adjList; // 邻接表
bool *isVisited;
} Graph;
// 创建图并且初始化
Graph *createGraph(int vertis)
{
// 给图申请内存
Graph *grash = new Graph();
if (!grash)
{
perror("申请失败");
return 0;
}
// 初始化顶点数
grash->numVertices = vertis;
// 邻接表申请内存
grash->adjList = new Node *[vertis];
if (!grash->adjList)
{
perror("申请失败");
return 0;
}
// 邻接表初始化
for (int i = 0; i < vertis; ++i)
{
// adjList 是一个二级指针数组,即它是一个指针的数组,每个指针都指向一个链表
// adjList[i] 是对指针数组的第 i 个元素进行解引用,得到的是一个一级指针
// grash->adjList[i] 设置为 nullptr,意味着对于图中的每个顶点 i,其对应的邻接链表的起始指针被初始化为空,表示在初始化时,每个顶点都没有任何邻接的边或者节点。
grash->adjList[i] = nullptr;
}
// 标记位申请内存
grash->isVisited = new bool[vertis]{0};
return grash;
}
// 添加边 src起点 dest终点
void addEdge(Graph *graph, int src, int dest, int weight)
{
// 为源顶点创建一个新节点
Node *newNode1 = new Node;
if (!newNode1)
{
perror("申请失败");
return;
}
// 设置邻接点
newNode1->vertex = dest;
// 设置权重
newNode1->weight = weight;
// 将新边添加到起点的链表中 头插
newNode1->next = graph->adjList[src]; //新节点的 next 指针指向当前 src 邻接链表的第一个节点。
// 这样,新节点 newNode1 被插入到链表的头部
graph->adjList[src] = newNode1; // 将 src 的邻接链表的头部更新为 newNode1。
// 这样,newNode1 成为链表的新头节点
// 如果是无向图,也需要添加反向边
Node *newNode2 = new Node;
if (!newNode2)
{
perror("申请失败");
return;
}
// 设置邻接点
newNode2->vertex = src;
// 设置权重
newNode2->weight = weight;
// 将新边添加到起点的链表中 头插
newNode2->next = graph->adjList[dest]; // 将新节点的 next 指针指向当前 src 邻接链表的第一个节点
// 更新第一条边
graph->adjList[dest] = newNode2; // 将 src 的邻接链表的头部更新为 newNode。这样,newNode 就成为 src 的邻接链表的第一个节点
// 如果是无向图,也需要添加反向边
}
// 迪杰斯特拉算法
void dijkstra(Graph *graph, int src) // src 是当前顶点
{
//距离:定义一个包含numVertices个元素的vector,每个成员用INT_MAX(∞)初始化
vector<int> dist(graph->numVertices, INT_MAX);//U数组 存储最短距离
//标记顶点是否被处理过了
vector<bool>sptSet(graph->numVertices, false);
// 自己到自己的距离是0
dist[src] = 0;
//-1的原因是最后一部实际上已经没必要再执行了,即A的遍历,因为最短距离已经计算出来了
for(int count = 0;count < graph->numVertices; ++count)
{
// 存储最小距离,方便比较
int minDistance = INT_MAX;
// 最小距离的顶点坐标信息,并标记为已处理
int minVertices = -1;
//遍历所有顶点(第一步选中的必定是自身,因为自身的距离是0,肯定最小)
// 找到U里面最短距离及其下标
for(int i = 0; i < graph->numVertices; i++)
{
//顶点未被处理过并且距离小于最小值
if(!sptSet[i] && dist[i] < minDistance)
{
// 更新最小距离
minDistance = dist[i] ;
//记录顶点
minVertices = i ;
}
}
//该顶点标记为已处理
sptSet[minVertices] = true;
// 更新该顶点的所有邻接点(未被标记过的)的最短距离
// 顶点 minVertices 的邻接链表的第一个节点
Node *current = graph->adjList[minVertices];
while(current)
{
//邻接点的值
int adj = current->vertex;
// /邻接点未被标记过 && 最小距离不是无穷(即是一个有效的距离,意味着他到源顶点是可
// 达的)&& 新距离小于原来的距离
if(!sptSet[adj] && dist[minVertices] != INT_MAX && dist[minVertices] + current->weight < dist[adj])
{
//更新距离信息 新的两边相加距离加入到 dist[adj]里面就是当前最短路径
dist[adj] = dist[minVertices] + current->weight ;
}
current = current->next;
}
}
// 打印构造的距离数组
for(int i = 0; i < graph->numVertices; i++)
{
cout << "Vertex " << i << " Distance from Source: " << dist[i] << endl;
}
}
// 清理Graph对象
void freeGraph(Graph* graph)
{
if (!graph)
{
return; // 如果指针为空,则直接返回
}
// 释放邻接表中每个链表占用的内存
for(int i = 0; i < graph->numVertices; i++)
{
Node *current = graph->adjList[i];
Node *newDeNode = nullptr;
while(current)
{
newDeNode = current;
delete newDeNode;
current = current->next;
}
}
// 释放邻接表数组本身占用的内存
delete[] graph->adjList;
// 释放访问标记数组占用的内存
delete[] graph->isVisited;
}
int main()
{
Graph* graph = createGraph(7);
addEdge(graph, 0, 1, 12);
addEdge(graph, 0, 5, 16);
addEdge(graph, 0, 6, 14);
addEdge(graph, 1, 2, 10);
addEdge(graph, 1, 5, 7);
addEdge(graph, 2, 3, 3);
addEdge(graph, 2, 4, 5);
addEdge(graph, 2, 5, 5);
addEdge(graph, 3, 4, 4);
addEdge(graph, 4, 5, 2);
addEdge(graph, 4, 6, 8);
addEdge(graph, 5, 6, 9);
dijkstra(graph, 3);
delete(graph);
graph = nullptr;
return 0;
}
结果是
广度优先遍历(从顶点2开始):
Visited 2
Visited 0
Visited 3
Visited 1
- 问题一:只定义一个S,不定义U可以吗
可以,S和U是互补的,定义一个就行
- 问题二 sptSet[adj]写成sptSet[minVertices]
不一样 sptSet[minVertices]是当前源节点最小的顶点, sptSet[adj】其实就是邻接点 条件其实要判断邻接点未被标记过
或者说minVertex 是当前找到的最近的未处理顶点,而 adj 是 minVertex 的邻接点
graph->adjList[minVertex]是一个链表,存储了minVertex的所有邻接点的信息。- 在更新距离时,通过遍历
graph->adjList[minVertex],找到minVertex的所有邻接点,并更新这些邻接点的距离

















 2660
2660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









