







1. 系统设计概述
自动泊车路径规划是自动驾驶领域的重要研究方向,主要包括以下步骤:
- 车位检测:通过传感器(如超声波雷达或摄像头)检测停车位的位置和大小。
- 路径规划:根据车辆当前状态和车位位置生成泊车路径。
- 轨迹跟踪:控制车辆沿规划路径移动,完成泊车。
本文将分别实现 垂直泊车 和 平行泊车 的路径规划算法,并使用 Matlab 进行仿真。
2. 路径规划方法
2.1 垂直泊车
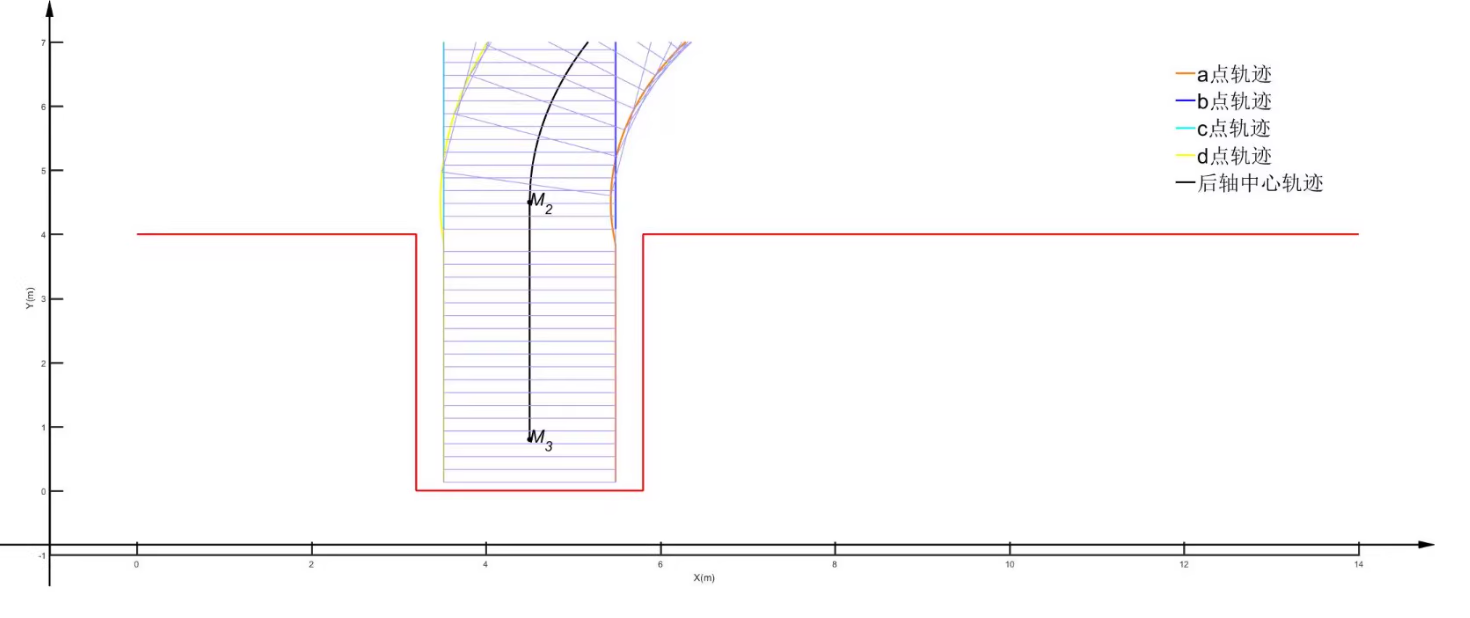
- 车辆从初始位置倒车进入垂直车位。
- 使用几何方法计算倒车轨迹,确保车辆不与周围障碍物发生碰撞。
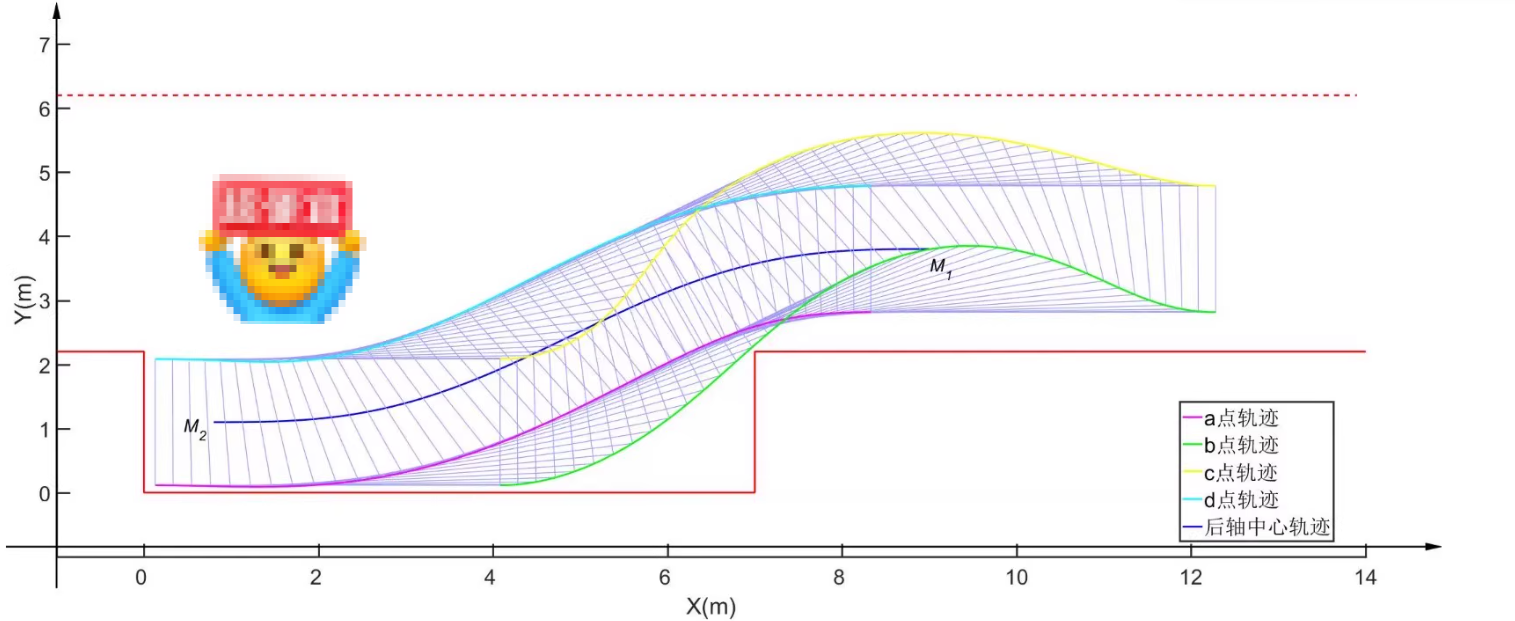
2.2 平行泊车
- 车辆从初始位置通过多次前进和后退调整姿态,最终停入平行车位。
- 使用分段路径规划方法,逐步调整车辆位置和方向。
3. 代码实现
3.1 垂直泊车路径规划
% 垂直泊车路径规划
clc; clear; close all;
% 车辆参数
L = 4.5; % 车辆长度 (m)
W = 1.8; % 车辆宽度 (m)
r_min = 5; % 最小转弯半径 (m)
% 泊车位参数
parking_spot_x = 0; % 泊车位中心 x 坐标
parking_spot_y = 0; % 泊车位中心 y 坐标
parking_spot_width = W + 0.5; % 泊车位宽度 (m)
parking_spot_length = L + 0.5; % 泊车位长度 (m)
% 初始位置
x0 = -5; % 初始 x 坐标
y0 = 2; % 初始 y 坐标
theta0 = deg2rad(90); % 初始航向角 (rad)
% 计算倒车轨迹
theta_end = deg2rad(-90); % 目标航向角 (rad)
delta_theta = theta_end - theta0; % 航向角变化量
R = r_min; % 转弯半径
arc_length = abs(delta_theta) * R; % 圆弧长度
% 轨迹点
t = linspace(0, arc_length, 100);
x_traj = x0 - R * sin(theta0) + R * sin(theta0 + t / R);
y_traj = y0 + R * cos(theta0) - R * cos(theta0 + t / R);
% 绘制结果
figure;
hold on;
grid on;
% 绘制泊车位
rectangle('Position', [parking_spot_x - parking_spot_width/2, ...
parking_spot_y - parking_spot_length/2, ...
parking_spot_width, parking_spot_length], ...
'EdgeColor', 'r', 'LineWidth', 2);
% 绘制车辆初始位置
plot_vehicle(x0, y0, theta0, L, W, 'b');
% 绘制轨迹
plot(x_traj, y_traj, 'g--', 'LineWidth', 2);
% 绘制车辆目标位置
plot_vehicle(parking_spot_x, parking_spot_y, theta_end, L, W, 'r');
title('垂直泊车路径规划');
xlabel('X (m)');
ylabel('Y (m)');
axis equal;
legend('泊车位', '初始车辆位置', '泊车轨迹', '目标车辆位置');
% 绘制车辆函数
function plot_vehicle(x, y, theta, L, W, color)
% 车辆四个角点
corners = [L/2, W/2; -L/2, W/2; -L/2, -W/2; L/2, -W/2];
% 旋转矩阵
R = [cos(theta), -sin(theta); sin(theta), cos(theta)];
rotated_corners = (R * corners')';
% 平移
rotated_corners(:,1) = rotated_corners(:,1) + x;
rotated_corners(:,2) = rotated_corners(:,2) + y;
% 绘制
fill(rotated_corners(:,1), rotated_corners(:,2), color, 'FaceAlpha', 0.5, 'EdgeColor', 'k');
end
3.2 平行泊车路径规划
% 平行泊车路径规划
clc; clear; close all;
% 车辆参数
L = 4.5; % 车辆长度 (m)
W = 1.8; % 车辆宽度 (m)
r_min = 5; % 最小转弯半径 (m)
% 泊车位参数
parking_spot_x = 0; % 泊车位起点 x 坐标
parking_spot_y = 0; % 泊车位起点 y 坐标
parking_spot_width = W + 0.5; % 泊车位宽度 (m)
parking_spot_length = L + 0.5; % 泊车位长度 (m)
% 初始位置
x0 = -10; % 初始 x 坐标
y0 = 2; % 初始 y 坐标
theta0 = deg2rad(0); % 初始航向角 (rad)
% 分段路径规划
theta1 = deg2rad(-45); % 第一段终点航向角
theta2 = deg2rad(0); % 第二段终点航向角
theta3 = deg2rad(-90); % 第三段终点航向角
R = r_min; % 转弯半径
arc_length1 = abs(theta1 - theta0) * R;
arc_length2 = abs(theta2 - theta1) * R;
arc_length3 = abs(theta3 - theta2) * R;
% 轨迹点
t1 = linspace(0, arc_length1, 50);
t2 = linspace(0, arc_length2, 50);
t3 = linspace(0, arc_length3, 50);
x_traj1 = x0 + R * cos(theta0) - R * cos(theta0 + t1 / R);
y_traj1 = y0 + R * sin(theta0) - R * sin(theta0 + t1 / R);
x_traj2 = x_traj1(end) + R * sin(theta1) - R * sin(theta1 + t2 / R);
y_traj2 = y_traj1(end) - R * cos(theta1) + R * cos(theta1 + t2 / R);
x_traj3 = x_traj2(end) - R * cos(theta2) + R * cos(theta2 + t3 / R);
y_traj3 = y_traj2(end) - R * sin(theta2) + R * sin(theta2 + t3 / R);
% 绘制结果
figure;
hold on;
grid on;
% 绘制泊车位
rectangle('Position', [parking_spot_x, ...
parking_spot_y - parking_spot_width/2, ...
parking_spot_length, parking_spot_width], ...
'EdgeColor', 'r', 'LineWidth', 2);
% 绘制车辆初始位置
plot_vehicle(x0, y0, theta0, L, W, 'b');
% 绘制轨迹
plot([x_traj1, x_traj2, x_traj3], [y_traj1, y_traj2, y_traj3], 'g--', 'LineWidth', 2);
% 绘制车辆目标位置
plot_vehicle(parking_spot_x, parking_spot_y, theta3, L, W, 'r');
title('平行泊车路径规划');
xlabel('X (m)');
ylabel('Y (m)');
axis equal;
legend('泊车位', '初始车辆位置', '泊车轨迹', '目标车辆位置');
% 绘制车辆函数
function plot_vehicle(x, y, theta, L, W, color)
corners = [L/2, W/2; -L/2, W/2; -L/2, -W/2; L/2, -W/2];
R = [cos(theta), -sin(theta); sin(theta), cos(theta)];
rotated_corners = (R * corners')';
rotated_corners(:,1) = rotated_corners(:,1) + x;
rotated_corners(:,2) = rotated_corners(:,2) + y;
fill(rotated_corners(:,1), rotated_corners(:,2), color, 'FaceAlpha', 0.5, 'EdgeColor', 'k');
end
4. 运行结果
- 垂直泊车:车辆从初始位置倒车进入垂直车位,轨迹为一段圆弧。
- 平行泊车:车辆通过多次前进和后退调整姿态,最终停入平行车位。

















 2111
2111

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









