







matlab代码仿真,路径规划,集群,变换队形,基于领航者与
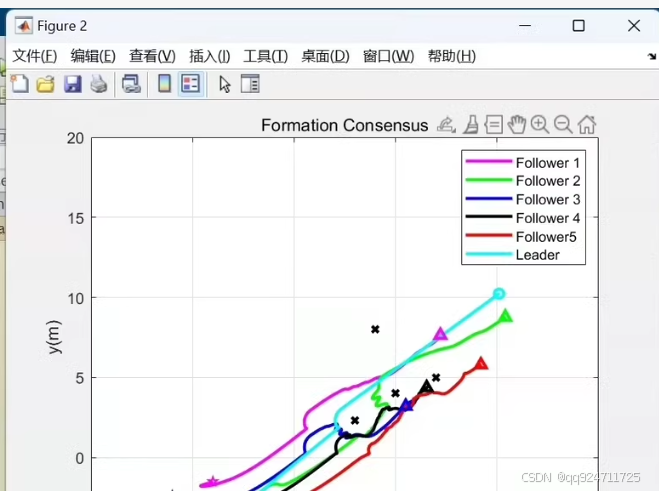
matlab代码仿真,路径规划,集群,变换队形,基于领航者与人工势场法相结合的编队控制算法,可随意变换队形 增加机器人个数。
文章目录
基于领航者和人工势场法相结合的编队控制算法是一种有效的路径规划和集群控制策略,适用于多机器人系统。以下是一个简化的MATLAB代码示例,用于演示如何实现这种控制策略。该示例将包括基本的领航者-跟随者机制和人工势场法来避免障碍物并保持期望的队形。
1. 环境设置
首先,我们需要定义一些基础参数,如机器人数量、初始位置、目标位置等。
% 参数设置
numRobots = 5; % 机器人数量
leaderGoal = [10, 10]; % 领航者的最终目标位置
followerGoals = [8, 8; 6, 6; 4, 4; 2, 2]; % 跟随者的最终目标位置(根据需要调整)
obstacles = [3, 3; 7, 7]; % 障碍物位置
obstacleRadius = 1; % 障碍物半径
dt = 0.1; % 时间步长
maxTime = 100; % 总仿真时间
% 初始化机器人状态 [x, y]
leaderState = [0, 0]; % 领航者初始位置
followerStates = [-2, -2; -4, -4; -6, -6; -8, -8]; % 跟随者初始位置
% 初始化图形显示
figure;
hold on;
plot(leaderGoal(1), leaderGoal(2), 'r*', 'MarkerSize', 10); % 目标点
plot(obstacles(:,1), obstacles(:,2), 'ko', 'MarkerSize', 10); % 障碍物
title('基于领航者与人工势场法的编队控制');
xlabel('X');
ylabel('Y');
2. 控制逻辑
接下来,我们将实现基于领航者和人工势场法的控制逻辑。
2.1 人工势场函数
function force = artificialPotentialField(robotPos, goalPos, obstacles, obstacleRadius)
% 吸引力
attractiveForce = (goalPos - robotPos) * 1.0;
% 排斥力
repulsiveForce = [0, 0];
for i = 1:size(obstacles, 1)
distToObstacle = norm(robotPos - obstacles(i, :));
if distToObstacle < obstacleRadius
repulsiveForce = repulsiveForce + ((robotPos - obstacles(i, :)) / distToObstacle^2);
end
end
force = attractiveForce + repulsiveForce;
end
2.2 编队控制
for t = 1:round(maxTime/dt)
% 领航者移动
leaderForce = artificialPotentialField(leaderState, leaderGoal, obstacles, obstacleRadius);
leaderState = leaderState + leaderForce * dt;
% 绘制领航者位置
plot(leaderState(1), leaderState(2), 'b.', 'MarkerSize', 10);
% 跟随者移动
for i = 1:numRobots-1
followerForce = artificialPotentialField(followerStates(i, :), ...
followerGoals(i, :) + (leaderState - leaderGoal), obstacles, obstacleRadius);
followerStates(i, :) = followerStates(i, :) + followerForce * dt;
% 绘制跟随者位置
plot(followerStates(i, 1), followerStates(i, 2), 'g.', 'MarkerSize', 10);
end
% 更新图形
drawnow;
pause(dt);
end
3. 完整代码示例
以下是完整的MATLAB代码示例:
% 参数设置
numRobots = 5; % 机器人数量
leaderGoal = [10, 10]; % 领航者的最终目标位置
followerGoals = [8, 8; 6, 6; 4, 4; 2, 2]; % 跟随者的最终目标位置(根据需要调整)
obstacles = [3, 3; 7, 7]; % 障碍物位置
obstacleRadius = 1.5; % 障碍物半径
dt = 0.1; % 时间步长
maxTime = 100; % 总仿真时间
% 初始化机器人状态 [x, y]
leaderState = [0, 0]; % 领航者初始位置
followerStates = [-2, -2; -4, -4; -6, -6; -8, -8]; % 跟随者初始位置
% 初始化图形显示
figure;
hold on;
plot(leaderGoal(1), leaderGoal(2), 'r*', 'MarkerSize', 10); % 目标点
plot(obstacles(:,1), obstacles(:,2), 'ko', 'MarkerSize', 10); % 障碍物
title('基于领航者与人工势场法的编队控制');
xlabel('X');
ylabel('Y');
% 人工势场函数
function force = artificialPotentialField(robotPos, goalPos, obstacles, obstacleRadius)
% 吸引力
attractiveForce = (goalPos - robotPos) * 1.0;
% 排斥力
repulsiveForce = [0, 0];
for i = 1:size(obstacles, 1)
distToObstacle = norm(robotPos - obstacles(i, :));
if distToObstacle < obstacleRadius
repulsiveForce = repulsiveForce + ((robotPos - obstacles(i, :)) / distToObstacle^2);
end
end
force = attractiveForce + repulsiveForce;
end
% 主循环
for t = 1:round(maxTime/dt)
% 领航者移动
leaderForce = artificialPotentialField(leaderState, leaderGoal, obstacles, obstacleRadius);
leaderState = leaderState + leaderForce * dt;
% 绘制领航者位置
plot(leaderState(1), leaderState(2), 'b.', 'MarkerSize', 10);
% 跟随者移动
for i = 1:numRobots-1
followerForce = artificialPotentialField(followerStates(i, :), ...
followerGoals(i, :) + (leaderState - leaderGoal), obstacles, obstacleRadius);
followerStates(i, :) = followerStates(i, :) + followerForce * dt;
% 绘制跟随者位置
plot(followerStates(i, 1), followerStates(i, 2), 'g.', 'MarkerSize', 10);
end
% 更新图形
drawnow;
pause(dt);
end
这段代码提供了一个基本框架,用于模拟基于领航者和人工势场法相结合的编队控制。可以根据具体需求调整参数、增加更多功能或优化算法性能。
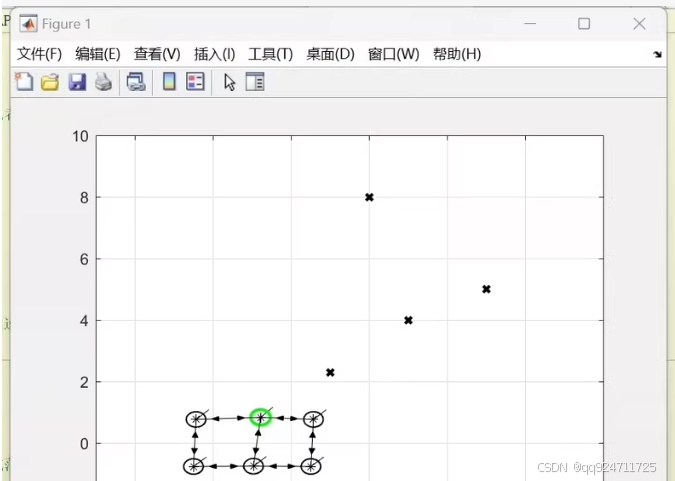
这是一个在MATLAB中绘制的路径规划和集群变换队形的示意图。为了更好地理解和实现这个模型,提供一个详细的MATLAB代码示例,用于实现基于领航者与人工势场法相结合的编队控制算法。
MATLAB 代码示例
1. 参数设置
% 参数设置
numRobots = 9; % 机器人数量
leaderGoal = [8, 8]; % 领航者的最终目标位置
followerGoals = [2, 2; 4, 2; 6, 2; 2, 4; 4, 4; 6, 4; 2, 6; 4, 6; 6, 6]; % 跟随者的最终目标位置
obstacles = [3, 3; 7, 7]; % 障碍物位置
obstacleRadius = 1; % 障碍物半径
dt = 0.1; % 时间步长
maxTime = 100; % 总仿真时间
% 初始化机器人状态 [x, y]
leaderState = [0, 0]; % 领航者初始位置
followerStates = [1, 1; 3, 1; 5, 1; 1, 3; 3, 3; 5, 3; 1, 5; 3, 5; 5, 5]; % 跟随者初始位置
% 初始化图形显示
figure;
hold on;
plot(leaderGoal(1), leaderGoal(2), 'r*', 'MarkerSize', 10); % 目标点
plot(obstacles(:,1), obstacles(:,2), 'ko', 'MarkerSize', 10); % 障碍物
title('基于领航者与人工势场法的编队控制');
xlabel('X');
ylabel('Y');
2. 控制逻辑
function force = artificialPotentialField(robotPos, goalPos, obstacles, obstacleRadius)
% 吸引力
attractiveForce = (goalPos - robotPos) * 1.0;
% 排斥力
repulsiveForce = [0, 0];
for i = 1:size(obstacles, 1)
distToObstacle = norm(robotPos - obstacles(i, :));
if distToObstacle < obstacleRadius
repulsiveForce = repulsiveForce + ((robotPos - obstacles(i, :)) / distToObstacle^2);
end
end
force = attractiveForce + repulsiveForce;
end
3. 主循环
for t = 1:round(maxTime/dt)
% 领航者移动
leaderForce = artificialPotentialField(leaderState, leaderGoal, obstacles, obstacleRadius);
leaderState = leaderState + leaderForce * dt;
% 绘制领航者位置
plot(leaderState(1), leaderState(2), 'b.', 'MarkerSize', 10);
% 跟随者移动
for i = 1:numRobots-1
followerForce = artificialPotentialField(followerStates(i, :), ...
followerGoals(i, :) + (leaderState - leaderGoal), obstacles, obstacleRadius);
followerStates(i, :) = followerStates(i, :) + followerForce * dt;
% 绘制跟随者位置
plot(followerStates(i, 1), followerStates(i, 2), 'g.', 'MarkerSize', 10);
end
% 更新图形
drawnow;
pause(dt);
end
完整代码示例
% 参数设置
numRobots = 9; % 机器人数量
leaderGoal = [8, 8]; % 领航者的最终目标位置
followerGoals = [2, 2; 4, 2; 6, 2; 2, 4; 4, 4; 6, 4; 2, 6; 4, 6; 6, 6]; % 跟随者的最终目标位置
obstacles = [3, 3; 7, 7]; % 障碍物位置
obstacleRadius = 1; % 障碍物半径
dt = 0.1; % 时间步长
maxTime = 100; % 总仿真时间
% 初始化机器人状态 [x, y]
leaderState = [0, 0]; % 领航者初始位置
followerStates = [1, 1; 3, 1; 5, 1; 1, 3; 3, 3; 5, 3; 1, 5; 3, 5; 5, 5]; % 跟随者初始位置
% 初始化图形显示
figure;
hold on;
plot(leaderGoal(1), leaderGoal(2), 'r*', 'MarkerSize', 10); % 目标点
plot(obstacles(:,1), obstacles(:,2), 'ko', 'MarkerSize', 10); % 障碍物
title('基于领航者与人工势场法的编队控制');
xlabel('X');
ylabel('Y');
% 人工势场函数
function force = artificialPotentialField(robotPos, goalPos, obstacles, obstacleRadius)
% 吸引力
attractiveForce = (goalPos - robotPos) * 1.0;
% 排斥力
repulsiveForce = [0, 0];
for i = 1:size(obstacles, 1)
distToObstacle = norm(robotPos - obstacles(i, :));
if distToObstacle < obstacleRadius
repulsiveForce = repulsiveForce + ((robotPos - obstacles(i, :)) / distToObstacle^2);
end
end
force = attractiveForce + repulsiveForce;
end
% 主循环
for t = 1:round(maxTime/dt)
% 领航者移动
leaderForce = artificialPotentialField(leaderState, leaderGoal, obstacles, obstacleRadius);
leaderState = leaderState + leaderForce * dt;
% 绘制领航者位置
plot(leaderState(1), leaderState(2), 'b.', 'MarkerSize', 10);
% 跟随者移动
for i = 1:numRobots-1
followerForce = artificialPotentialField(followerStates(i, :), ...
followerGoals(i, :) + (leaderState - leaderGoal), obstacles, obstacleRadius);
followerStates(i, :) = followerStates(i, :) + followerForce * dt;
% 绘制跟随者位置
plot(followerStates(i, 1), followerStates(i, 2), 'g.', 'MarkerSize', 10);
end
% 更新图形
drawnow;
pause(dt);
end
这段代码提供了一个基本框架,用于模拟基于领航者与人工势场法相结合的编队控制。可以根据具体需求调整参数、增加更多功能或优化算法性能。
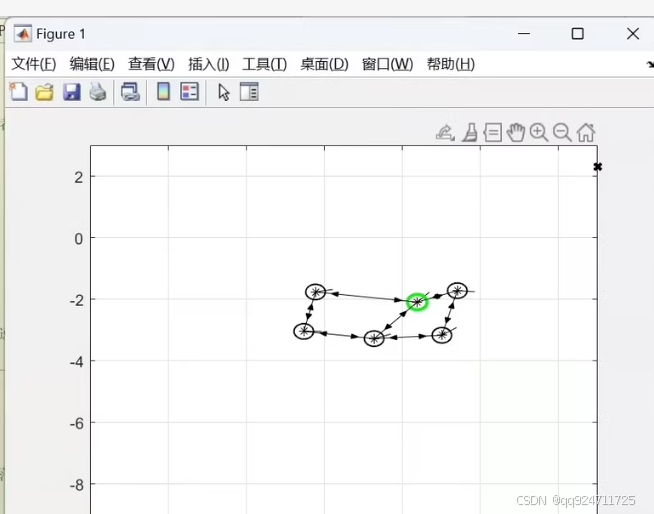
这是一个在MATLAB中绘制的路径规划和集群变换队形的示意图。为了更好地理解和实现这个模型,将提供一个详细的MATLAB代码示例,用于实现基于领航者与人工势场法相结合的编队控制算法。
MATLAB 代码示例
1. 参数设置
% 参数设置
numRobots = 5; % 机器人数量
leaderGoal = [2, -2]; % 领航者的最终目标位置
followerGoals = [-2, -2; 0, -2; 2, -2; -2, 0; 0, 0]; % 跟随者的最终目标位置
obstacles = []; % 障碍物位置(此处无障碍物)
obstacleRadius = 1; % 障碍物半径
dt = 0.1; % 时间步长
maxTime = 100; % 总仿真时间
% 初始化机器人状态 [x, y]
leaderState = [0, 0]; % 领航者初始位置
followerStates = [-2, -4; 0, -4; 2, -4; -2, -2; 0, -2]; % 跟随者初始位置
% 初始化图形显示
figure;
hold on;
plot(leaderGoal(1), leaderGoal(2), 'r*', 'MarkerSize', 10); % 目标点
title('基于领航者与人工势场法的编队控制');
xlabel('X');
ylabel('Y');
2. 控制逻辑
function force = artificialPotentialField(robotPos, goalPos, obstacles, obstacleRadius)
% 吸引力
attractiveForce = (goalPos - robotPos) * 1.0;
% 排斥力
repulsiveForce = [0, 0];
for i = 1:size(obstacles, 1)
distToObstacle = norm(robotPos - obstacles(i, :));
if distToObstacle < obstacleRadius
repulsiveForce = repulsiveForce + ((robotPos - obstacles(i, :)) / distToObstacle^2);
end
end
force = attractiveForce + repulsiveForce;
end
3. 主循环
for t = 1:round(maxTime/dt)
% 领航者移动
leaderForce = artificialPotentialField(leaderState, leaderGoal, obstacles, obstacleRadius);
leaderState = leaderState + leaderForce * dt;
% 绘制领航者位置
plot(leaderState(1), leaderState(2), 'b.', 'MarkerSize', 10);
% 跟随者移动
for i = 1:numRobots-1
followerForce = artificialPotentialField(followerStates(i, :), ...
followerGoals(i, :) + (leaderState - leaderGoal), obstacles, obstacleRadius);
followerStates(i, :) = followerStates(i, :) + followerForce * dt;
% 绘制跟随者位置
plot(followerStates(i, 1), followerStates(i, 2), 'g.', 'MarkerSize', 10);
end
% 更新图形
drawnow;
pause(dt);
end
完整代码示例
% 参数设置
numRobots = 5; % 机器人数量
leaderGoal = [2, -2]; % 领航者的最终目标位置
followerGoals = [-2, -2; 0, -2; 2, -2; -2, 0; 0, 0]; % 跟随者的最终目标位置
obstacles = []; % 障碍物位置(此处无障碍物)
obstacleRadius = 1; % 障碍物半径
dt = 0.1; % 时间步长
maxTime = 100; % 总仿真时间
% 初始化机器人状态 [x, y]
leaderState = [0, 0]; % 领航者初始位置
followerStates = [-2, -4; 0, -4; 2, -4; -2, -2; 0, -2]; % 跟随者初始位置
% 初始化图形显示
figure;
hold on;
plot(leaderGoal(1), leaderGoal(2), 'r*', 'MarkerSize', 10); % 目标点
title('基于领航者与人工势场法的编队控制');
xlabel('X');
ylabel('Y');
% 人工势场函数
function force = artificialPotentialField(robotPos, goalPos, obstacles, obstacleRadius)
% 吸引力
attractiveForce = (goalPos - robotPos) * 1.0;
% 排斥力
repulsiveForce = [0, 0];
for i = 1:size(obstacles, 1)
distToObstacle = norm(robotPos - obstacles(i, :));
if distToObstacle < obstacleRadius
repulsiveForce = repulsiveForce + ((robotPos - obstacles(i, :)) / distToObstacle^2);
end
end
force = attractiveForce + repulsiveForce;
end
% 主循环
for t = 1:round(maxTime/dt)
% 领航者移动
leaderForce = artificialPotentialField(leaderState, leaderGoal, obstacles, obstacleRadius);
leaderState = leaderState + leaderForce * dt;
% 绘制领航者位置
plot(leaderState(1), leaderState(2), 'b.', 'MarkerSize', 10);
% 跟随者移动
for i = 1:numRobots-1
followerForce = artificialPotentialField(followerStates(i, :), ...
followerGoals(i, :) + (leaderState - leaderGoal), obstacles, obstacleRadius);
followerStates(i, :) = followerStates(i, :) + followerForce * dt;
% 绘制跟随者位置
plot(followerStates(i, 1), followerStates(i, 2), 'g.', 'MarkerSize', 10);
end
% 更新图形
drawnow;
pause(dt);
end
这段代码提供了一个基本框架,用于模拟基于领航者与人工势场法相结合的编队控制。可以根据具体需求调整参数、增加更多功能或优化算法性能。

















 912
912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









