




引言
大家好,欢迎回到我的深度学习“炼丹”笔记!
在上一篇博客中,我们一起探讨了学习率 (Learning Rate) 和优化器 (Optimizer) 这两个在模型训练中至关重要的超参数。在正式开始下半场之前,我们先快速回顾一下上篇中几个非常实用的结论 (Takeaways),这些观点对于理解后续内容也很有帮助:
-
别怕局部最优,警惕鞍点:在现代深度学习的高维空间中,我们真正需要克服的往往是鞍点 (Saddle Point),而非理论上的局部最小值 (Local Minima)。像 Momentum 和 Adam 这样的自适应优化器,正是帮助我们穿越这些平坦区域的“越野车”。
-
Warm-up 并非万能药:它主要用于解决训练初期,由于参数随机初始化可能导致的梯度爆炸或模型振荡问题,特别是在使用大学习率或大 Batch Size 的场景下。如果你的训练过程很稳定,不加 Warm-up 也完全没问题。
-
AdamW 是新趋势:相比 Adam,AdamW 更好地解耦了 L2 正则化(即权重衰减)和梯度更新,在许多任务上表现更佳。当你不知道用什么优化器时,选用 AdamW 通常是个稳妥且优秀的选择。
好了,回顾结束!现在,让我们正式进入下半场,继续探索超参数世界里剩下的几位重要成员:
-
批量大小 (Batch Size)
-
训练轮数 (Epochs)
-
正则化策略:Dropout 与 L1/L2 正则化 (Weight Decay)
-
其他常见超参数
一、批量大小(Batch Size) 与 训练轮数(Epochs)
在确定了学习率和优化器这些“如何更新参数”的策略后,我们需要定义训练的“宏观结构”:我们打算如何给模型“喂”数据,以及总共要“喂”多久? 这就引出了两个紧密相关的超参数:批量大小 (Batch Size) 和 训练轮数 (Epochs)。
打个比方,如果整个训练数据集是一本厚厚的教科书:
-
Batch Size 就是你一次读几页才停下来总结一下(进行一次参数更新)。
-
Epochs 就是你打算把整本教科书通读几遍。
显然,一次读的页数(Batch Size)会直接影响你读完整本书的速度,以及你对知识的吸收效果。
核心概念定义
首先,我们必须再次明确这三个概念:
-
Batch (批): 从总数据集中分出的一小批样本。
-
Iteration (迭代): 模型处理完一个 Batch,并完成一次参数更新的过程。
-
Epoch (轮): 模型完整地学习了一遍整个训练数据集的过程。
它们之间的关系是: 一个 Epoch 包含的 Iteration 次数 = ⌈数据集总样本数 / Batch Size⌉ (向上取整)。
权衡的艺术:选择合适的 Batch Size
Batch Size 的选择,是一个在训练速度、硬件限制和模型泛化能力之间的经典权衡。
-
使用较大的 Batch Size
-
优点:
-
训练速度快:更能发挥 GPU 的并行计算能力,完成一个 Epoch 所需的迭代次数更少,总耗时更短。
-
梯度方向更稳定:每次更新都考虑了大量样本,计算出的梯度更能代表整个数据集的真实方向,使得损失函数下降的曲线更平滑。
-
-
缺点:
-
显存消耗巨大:这是最直接的物理限制,过大的 Batch Size 会导致“显存溢出 (Out of Memory)”。
-
可能损害泛化能力:由于梯度过于稳定,模型可能会被“猛推”到一个尖锐的最小值 (Sharp Minimum)。这种最小值在训练集上表现很好,但在测试集上可能表现不佳,因为它对输入的微小变化非常敏感。
-
-
-
使用较小的 Batch Size
-
优点:
-
硬件要求低:显存占用小,对普通设备更友好。
-
自带正则化效果:每次迭代的梯度都带有一定的随机性(噪声),这种“不稳定”反而像是在训练中不断给模型施加“扰动”,有助于模型跳出局部最优,最终找到一个更平坦的最小值 (Flat Minimum)。平坦的最小值通常意味着更好的泛化能力。
-
-
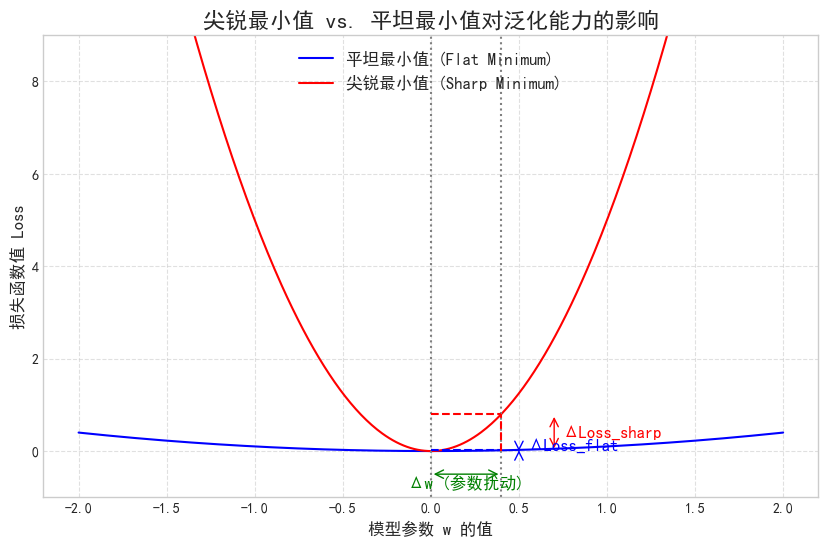
(图片使用numpy和matplotlib绘制得到)
-
缺点:
-
训练总时间可能更长:虽然 GPU 利用率可能不高,但完成一个 Epoch 需要的迭代次数大大增加。
-
损失函数震荡:训练过程会非常“颠簸”,需要配合一个较小的学习率来保证模型能够收敛。
-
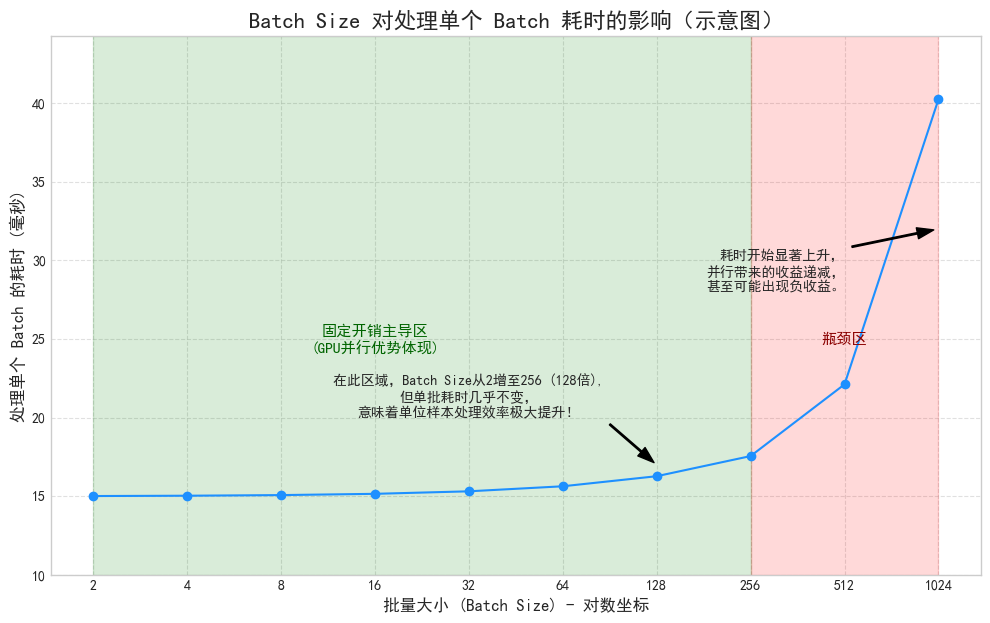
(图片使用numpy和matplotlib绘制得到)
Attention:为什么 Batch Size 通常是2的次幂?
将训练批次大小(Batch Size)设置为2的次幂(如32, 64, 128, 256)主要是为了最大化硬件(尤其是GPU)的计算和内存访问效率。
1. 硬件内存对齐 (Memory Alignment)
这是最核心、最底层的的原因。
-
计算机内存结构:CPU和GPU的内存是按块(Blocks/Chunks)来组织和访问的,而不是一个字节一个字节地零散访问。这些块的大小通常是2的次幂(例如,缓存行Cache Line通常是64字节)。
-
对齐访问 vs. 非对齐访问:当处理器需要读取数据时,如果数据的起始地址和大小都与这些内存块“对齐”,那么一次内存事务(Memory Transaction)就可以读取整个数据块,效率极高。如果数据没有对齐(例如,大小为33的数据跨越了两个内存块),处理器可能需要进行两次内存读取,然后将结果拼接起来,这会引入额外的开销和延迟。
-
形象的比喻:想象一下你去图书馆取书。书架上每格正好能放32本书。
-
对齐的情况 (Batch Size = 32):你需要32本书,管理员直接把一整格的书推给你,非常快。
-
不对齐的情况 (Batch Size = 33):你需要33本书,管理员需要先推给你一整格(32本),然后再去下一格,只为了拿出第33本书。这个“再去下一格”的操作就是额外开销。
-
将批次大小设置为2的次幂,可以确保数据在内存中能够更好地对齐,从而实现更快的内存读取和写入速度,这对于数据密集型的深度学习训练至关重要。
2. GPU并行计算架构 (CUDA Cores & Warps)
GPU通过大规模并行计算来加速训练,其执行单元的组织方式也偏爱2的次幂。
-
Warp/Wavefront:在NVIDIA的GPU中,线程(Threads)是以一个称为“Warp”的组来调度和执行的,一个Warp通常包含32个线程。在AMD的GPU中,类似的概念叫做“Wavefront”,通常是32或64个线程。
-
充分利用计算单元:GPU执行指令时,是一个Warp中的所有线程同时执行相同的指令,只是作用于不同的数据上(这被称为SIMT - Single Instruction, Multiple Threads)。
-
如果你的批次大小是64,那么GPU可以调度两个完整的Warp(2 * 32 = 64),所有64个线程都在进行有效的计算,硬件利用率是100%。
-
如果你的批次大小是33,GPU会调度两个Warp来处理。第一个Warp处理前32个样本,完全被利用。第二个Warp被启动,但它内部的32个线程中,只有1个线程在工作(处理第33个样本),其余31个线程都是空闲的,但它们仍然占用了计算资源。这就造成了巨大的硬件资源浪费。
-
因此,将批次大小设置为32的倍数(如32, 64, 128)可以确保GPU的计算单元得到最充分的利用,避免“线程闲置”造成的效率损失。
3. 专用硬件单元和底层库的优化
-
Tensor Cores:现代NVIDIA GPU(如Volta架构及之后)包含专门用于矩阵乘法和累加运算的硬件单元——Tensor Cores。这些单元被高度优化,它们处理的矩阵维度通常是8x8或16x16。为了让Tensor Cores发挥最大效能,输入的数据维度(包括批次大小)最好是8的倍数或16的倍数。2的次幂(≥8)自然满足这个条件。
-
cuDNN/oneMKL等加速库:像NVIDIA的cuDNN、Intel的oneMKL这样的底层深度学习加速库,内部包含了大量为特定硬件手写的、高度优化的计算“核函数”(Kernels)。这些库的开发者会优先为最常见、最高效的尺寸(通常是2的次幂)编写最优代码路径。当你使用这些尺寸时,库会调用最快的那个实现。如果使用一个“奇怪”的尺寸,库可能会回退到一个更通用、但速度较慢的算法。
恰到好处:如何确定训练的轮数 (Epochs)
知道了模型一次“吃”多少数据,下一个问题就是总共要“喂”几轮?Epochs 的数量直接决定了模型的拟合程度。
-
Epochs 过少:模型还没学透,处于欠拟合 (Underfitting) 状态。就像一个学生书都没看完就去考试,成绩自然很差。
-
Epochs 过多:模型把训练集“背”得滚瓜烂熟,连里面的错别字(噪声)都记住了,导致过拟合 (Overfitting)。虽然在模拟题(训练集)上能拿满分,但一到正式考试(测试集)就原形毕露。
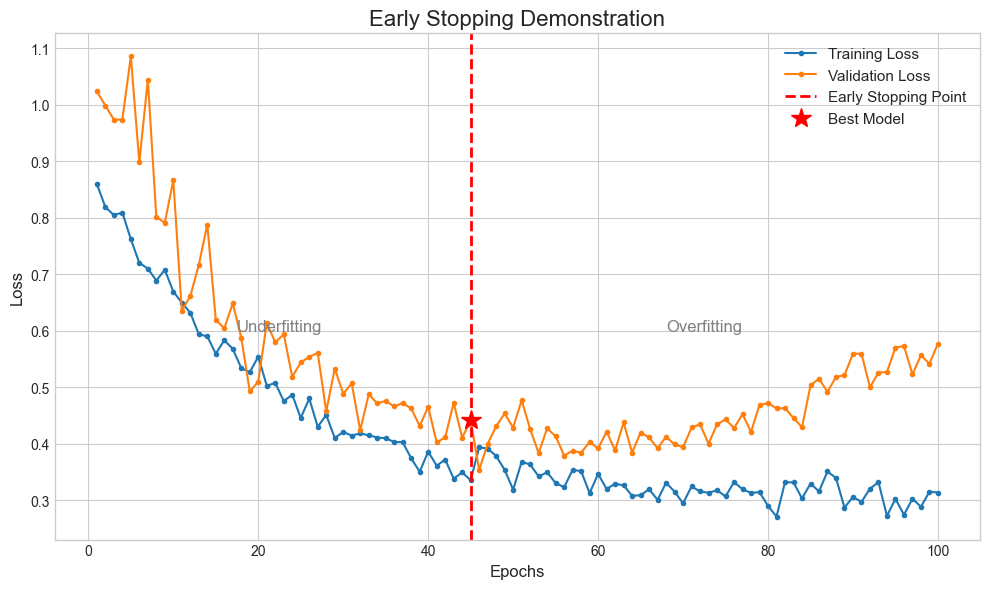
(图片使用numpy和matplotlib绘制得到)
那么,如何找到那个完美的“火候”呢?答案是:不要去猜,让模型自己告诉我们!
这就要用到深度学习实践中最重要的技巧之一:早停 (Early Stopping)。
早停的实施步骤:
-
划分验证集 (Validation Set): 从训练数据中预留一小部分(例如10-20%)作为验证集。它不参与梯度更新,只作为一个“模拟考场”,用来评估模型在每个 Epoch 结束后的真实水平。
-
持续监控:在每个 Epoch 训练结束后,我们都在验证集上计算模型的损失(Validation Loss)或准确率等指标。
-
找到“拐点”并停止:我们会观察到,在训练初期,训练损失和验证损失都会下降。但到某个点之后,训练损失仍在下降,而验证损失却停止下降,甚至开始回升。这个“拐点”就是模型开始过拟合的信号!此时,我们就应该立即停止训练,并保存验证损失最低时的那个模型作为最佳模型。
实践策略与总结
-
Batch Size 的选择:
-
在显存允许的范围内,从一个不大不小的值开始尝试(这通常与数据集的大小相关)。
-
选择 2 的幂次方 (32, 64, 128...) 通常能获得更好的硬件效率。
-
如果追求极致的泛化性能,可以尝试较小的 Batch Size,并耐心等待训练完成。如果追求训练速度,则在显存允许下尽可能增大 Batch Size,并配合适当的学习率调整。
-
-
Epochs 的确定:
-
不要预先固定一个很大的 Epochs 数。
-
使用 Early Stopping 配合验证集来动态地决定何时停止训练。这不仅能有效防止过拟合,还能在模型达到最佳性能时自动结束,节省大量时间和计算资源。
-
二、正则化策略 (Regularization)
到目前为止,我们讨论的超参数主要关注如何让模型“学得快、学得好”。但还有一个同样重要的问题:如何防止模型“学过头”?这就是过拟合 (Overfitting)。
一个过拟合的模型,就像一个只会死记硬背、不懂变通的学生。他在模拟题(训练集)上能考满分,因为他把所有题目的答案都背下来了;可一旦遇到题型稍有变化的新考题(测试集),他就束手无策。
正则化 (Regularization) 就是一套旨在防止过拟合、提升模型泛化能力 (Generalization) 的方法论。它的核心思想是对模型的复杂度进行限制或惩罚,迫使它去学习数据中更本质、更普适的规律,而不是去记那些无关紧要的细节和噪声。
下面我们来深入探讨几种最核心的正则化技术。
1. L1 & L2 正则化 (权重惩罚)
这是最经典的正则化方法。它通过修改损失函数,增加一个关于模型权重的“惩罚项”来实现。
标准的损失函数:
Loss = 数据损失 (Data Loss) (例如:均方误差)
加入正则化后的损失函数:
New Loss = 数据损失 (Data Loss) + λ * 惩罚项 (Penalty Term)
-
λ (Lambda):正则化强度系数,是一个超参数。它控制着“惩罚”的力度。
-
λ 越大,惩罚越重,模型越趋向于简单,可能导致欠拟合 (Underfitting)。
-
λ 越小,惩罚越轻,模型越容易变得复杂,可能导致过拟合 (Overfitting)。
-
L2 正则化 (Ridge Regression / 岭回归)
-
工作原理:
它的惩罚项是模型所有权重 w 的平方和,再乘以一个超参数 λ (Lambda)。
L2 惩罚 = λ * Σ(w²) -
直观理解:
L2 正則化不喜歡“极端”的权重。如果某个权重值特别大,它的平方就会变得非常大,导致惩罚项急剧增加。为了最小化整体损失,优化器就必须在“拟合训练数据”和“保持权重小”之间找到一个平衡。-
为什么小权重能防止过拟合? 一个权重很大的模型,通常意味着它对输入特征的微小变化非常敏感。这会导致模型的决策边界变得非常“陡峭”和“弯曲”,拼命去迎合每一个训练样本点,从而产生过拟合。相反,权重较小的模型,其决策边界会更平滑、更简单,对噪声不那么敏感,泛化能力也就更强。
-
“权重衰减”之名: 在实际的梯度更新中,L2 正则化的效果等同于在每次更新权重时,先让权重自身“衰减”一点点 (w = w * (1 - decay_rate)),然后再进行常规的梯度下降。这便是“权重衰减 (Weight Decay)”这个名字的由来。
-
-
实践建议:
L2 正则化是深度学习中最常用、最默认的正则化选项。当你使用的优化器是 AdamW 时,其中的 "W" 就代表它正确地实现了权重衰减。你只需要设置 weight_decay 这个超参数(它就是 λ)即可,通常从 1e-4, 1e-3 等值开始尝试。
L1 正则化 (Lasso Regression)
-
工作原理:
它的惩罚项是模型所有权重 w 的绝对值之和。
L1 惩罚 = λ * Σ|w| -
独特之处:稀疏性 (Sparsity):
L1 正则化有一个非常强大的副作用:它会促使很多不重要的权重精确地变为 0。这相当于在训练过程中自动进行“特征选择”,把那些对结果贡献不大的特征给“屏蔽”掉,从而得到一个稀疏模型。-
几何解释: 想象一个二维的权重空间 (w1, w2)。L2 惩罚的等值线是一个圆形,而 L1 的等值线是一个菱形。当损失函数的等高线与这些惩罚项的等值线相切时(即找到最优解),L1 的菱形尖角更容易与坐标轴相交,从而导致某个权重恰好为 0。
-
-
实践建议:
在深度学习中,L1 正则化用得相对较少,因为 L2 的平滑效果通常更受欢迎。但在某些需要模型可解释性或希望压缩模型大小的场景下,L1 的稀疏特性会非常有价值。
2. Dropout (随机失活)
Dropout 是一种非常强大且思想清奇的正则化技术,专门为神经网络设计。
-
工作原理:
在模型训练的每一次前向传播中,Dropout 会以一个预设的概率 p (即 Dropout Rate),随机地将网络中的一部分神经元“临时关闭”。这些被关闭的神经元既不参与前向计算,也不参与反向传播的梯度更新。在测试时候则恢复。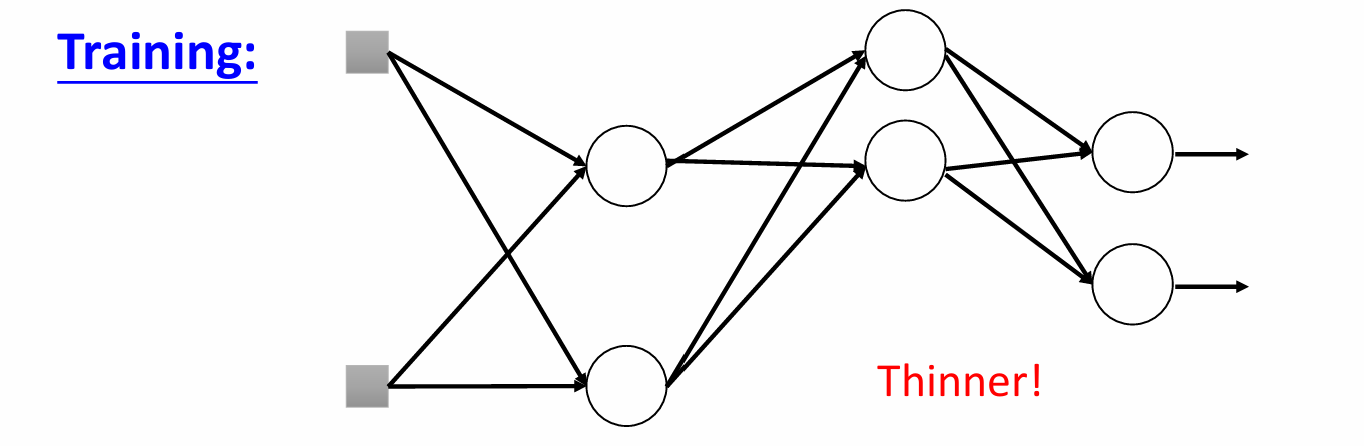
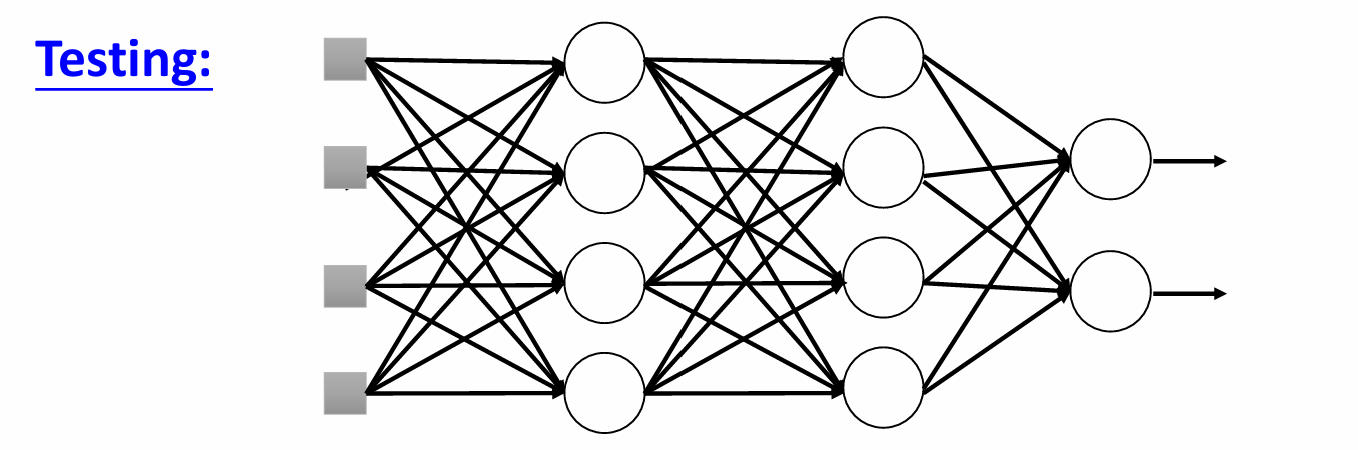
(这两张图片取自李宏毅老师课件,我觉得老师的例子可能更生动,下面这张图也来自老师课件)
这说明,搞科研和喜欢漫画并不冲突啊,魂淡!
-
为什么有效?
-
打破“协同适应”: 如果没有 Dropout,网络中的神经元可能会产生复杂的依赖关系。比如,神经元 A 的输出可能高度依赖于神经元 B 和 C 的特定组合。这种“小团体”式的学习模式很脆弱,容易过拟合。Dropout 随机地让“队友”消失,迫使每个神经元都必须“自力更生”,学习到更独立、更鲁棒的特征,而不是过度依赖少数几个邻居。
-
模型集成 (Ensemble) 的思想: 每次应用 Dropout,我们都相当于在训练一个结构不同的“子网络”。整个训练过程,就像是同时训练了成千上万个共享权重的子网络。在最后做预测时,我们保留所有神经元,这近似于将所有这些子网络的预测结果进行平均。模型集成是公认的提升性能、防止过拟合的强大技术。
-
-
实践建议:
-
Dropout Rate p 是需要设置的超参数,常见范围是 0.2 到 0.5。
-
通常用在网络中容易过拟合的全连接层,对于卷积层,由于其参数共享的特性,过拟合风险较低,可以不用或使用较小的 Dropout Rate。
-
极其重要的一点: Dropout 只在训练 (train) 模式下开启。在评估或预测 (eval / inference) 模式下,必须关闭 Dropout,并使用完整的网络进行计算。幸运的是,所有主流框架都会自动帮你处理这个模式切换。
-
3. Early Stopping (早停)
我们在上一节已经提过,但从本质上讲,早停也是一种非常有效且简单的正则化方法。它的逻辑是:在模型开始过拟合之前就停止训练。通过监控验证集的性能,我们捕捉到泛化能力达到顶峰的时刻,从而避免了模型在训练集上继续“画蛇添足”。
4. Data Augmentation (数据增强)
“给我更多的数据!”——这是对抗过拟合最根本、最有效的方法。但获取新数据成本高昂。数据增强则提供了一种“无中生有”的廉价替代方案。
-
工作原理:
通过对现有的训练数据进行一系列随机变换,来创造出新的、合理的训练样本。-
图像领域: 随机旋转、裁剪、翻转、缩放、调整亮度和对比度等。
-
文本领域: 同义词替换、随机插入/删除词语、回译(如:中文->英文->中文)等(学术裁缝降低查重doge)。
-
-
为什么有效?
数据增强极大地扩充了训练集的多样性。它教会模型什么是“不变性” (Invariance)。例如,一张猫的图片,无论向左旋转 15 度,还是亮度稍暗一点,它依然是一只猫。通过学习这些增强样本,模型被迫关注物体本身的核心特征,而不是图片的方向、光照等次要信息,从而大大提升了泛化能力。
数据增强绝非“万金油”,这种方案往往要求对模型应用的邻域有一定的了解,盲目使用或错误使用确实会适得其反。
几个典型的反面案例:
-
数字识别 (MNIST):对数字“6”进行垂直翻转,它就变成了“9”。这种增强方式完全改变了样本的标签和语义,会严重误导模型。
-
医学影像(如X光片):在医学图像中,方向和位置通常包含着至关重要的诊断信息。对一张胸部X光片进行随意的水平翻转,可能会将左肺和右肺的位置颠倒,这是绝对不能接受的。
-
交通标志识别:对一个“停止”标志进行颜色抖动,如果将其主色调从红色变成了绿色,模型可能会错误地将其与“通行”标志关联起来。
三、其他关键超参数
除了上述参数,还有一些选择虽然不常在“调参”的语境下被反复调整,但它们是构建和训练模型的基础性决策,选错了同样会导致灾难性后果。
1. 网络架构 (Network Architecture)
这其实是“最大”的一组超参数,它定义了模型的骨架。
-
深度 (Depth): 网络包含多少层?更深的网络能学习到更复杂、更抽象的层次化特征,但也更容易出现梯度消失/爆炸和过拟合。
-
宽度 (Width): 每层包含多少个神经元/通道?更宽的网络能在同一层级学习到更丰富的特征。
-
实践建议: 对于初学者,尽量避免从零开始发明一个全新的架构。最佳实践是站在巨人的肩膀上,首先选择一个在你的任务领域被验证过的经典架构(如图像领域的 ResNet、VGG,NLP 领域的 BERT、GPT),然后在此基础上进行微调 (Fine-tuning)。
2. 激活函数 (Activation Function)
激活函数的作用是为神经网络引入非线性。没有它,无论你的网络有多少层,本质上都只是一个简单的线性模型,无法学习复杂的数据模式。
-
旧时代的 Sigmoid / Tanh: 它们的主要问题在于容易导致梯度消失,使得深层网络的训练非常困难,现在已基本被淘汰。
Sigmoid:
Tanh (Hyperbolic Tangent)
-
现代的王者 ReLU (Rectified Linear Unit): f(x) = max(0, x)。它形式简单、计算高效,并且在正数区间不会饱和,极大地缓解了梯度消失问题。是当今最常用、最默认的选择。它的一个缺点是“Dying ReLU”问题(负数区间的神经元可能永远无法被激活)。
-
ReLU 的变体 (Leaky ReLU, GELU等): 为了解决 Dying ReLU 问题,出现了 Leaky ReLU(允许负数区间有微小的梯度)。而 GELU 则是一种更平滑的变体,在 Transformer 模型中被广泛使用。
-
实践建议: 默认使用 ReLU。如果发现训练中有很多神经元“死亡”,可以换成 Leaky ReLU。如果你在用 Transformer,那就用 GELU。
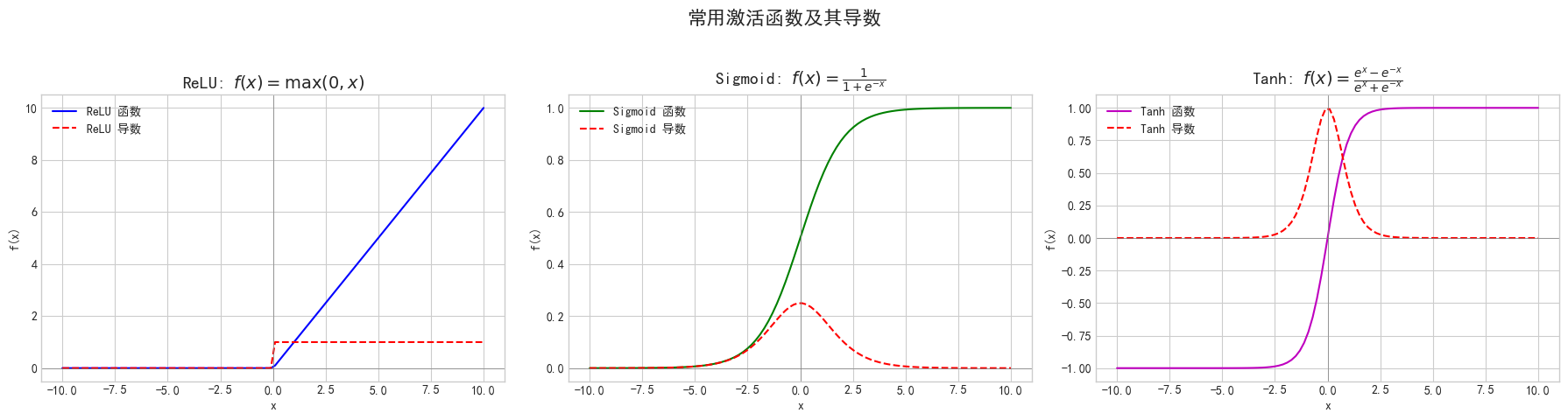
(图片使用numpy和matplotlib绘制得到)
3. 权重初始化 (Weight Initialization)
在训练开始前,模型的权重需要被赋予一个初始值。这个看似简单的步骤却至关重要。
-
问题: 如果初始权重过大,可能导致梯度爆炸;如果过小,则可能导致梯度消失,使得网络无法有效学习。
-
解决方案: 现代深度学习框架已经内置了成熟的初始化策略。最著名的是:
-
Xavier / Glorot 初始化: 适用于 Sigmoid / Tanh 激活函数。
-
He 初始化: 专门为 ReLU 及其变体设计,是目前的主流。
-
-
实践建议: 大多数情况下,你不需要手动设置这个。主流框架(PyTorch, TensorFlow)在创建层时会自动选择合适的默认初始化方法(通常是 He 初始化)。只需要知道它的存在和重要性即可。
四、总结
经过上下两篇的系统梳理,我们一同探索了深度学习模型训练中那些至关重要的超参数。现在,让我们对这次旅程的核心知识点进行一次全面且理性的回顾。
回顾上篇:构建高效的训练引擎
上一篇博客中,我们聚焦于模型训练的两个“发动机”级别的超参数,它们共同决定了模型参数更新的效率与方向。
-
学习率 (Learning Rate):作为模型更新的步长,其设定直接关系到训练的稳定性和收敛速度。我们探讨了从固定学习率到使用 Warm-up 和 学习率调度器 (Scheduler) 进行动态调整的必要性,以平衡初期的快速探索和后期的精细微调。
-
优化器 (Optimizer):作为参数更新的具体算法,我们从最基础的 SGD 出发,了解了 Momentum 如何帮助克服局部最优和鞍点,并深入分析了以 Adam 为代表的自适应优化器家族如何为每个参数提供个性化的学习率,从而实现更快速、更稳健的收敛。
核心结论是,一个精心设计的动态学习率策略与一个强大的自适应优化器(如Adam/AdamW)相结合,是保障模型训练成功的基础。
本篇核心:精细化训练与模型的泛化之道
在本篇中,我们将视野从“如何更新参数”扩展到“如何组织训练”以及“如何防止模型学偏”。
-
训练结构 (Batch Size & Epochs):我们明确了 Batch Size 在训练速度、内存消耗和模型泛化能力之间的权衡关系。较大的 Batch Size 可以加速训练并稳定梯度,但可能陷入更尖锐的最小值;较小的 Batch Size 则引入了噪声,有助于模型跳出局部最优,提升泛化能力。而 Epochs 的数量则需要通过监控验证集性能来确定,早停 (Early Stopping) 是防止训练过度、找到最佳“火候”的关键实践。
-
正则化策略 (Regularization):这是对抗过拟合的“军火库”。我们系统地学习了:
-
L1 & L2 正则化:通过在损失函数中增加权重惩罚项,限制模型复杂度。
-
Dropout:在训练中随机“失活”神经元,强制网络学习更鲁棒的特征。
-
数据增强 (Data Augmentation):通过变换现有数据来扩充训练集,是提升模型泛化能力最根本有效的方法之一。
-
-
基础性决策:最后,我们也强调了如网络架构、激活函数和权重初始化等 foundational choices 的重要性。它们共同构成了模型的“骨架”与“血肉”,是后续所有优化的基石。
总的来说,成功的模型训练不仅在于选择好的“引擎”,更在于对训练全程的精细化管理和对模型泛化能力的持续关注。
科学的调参,是在模型容量、训练效率与泛化性能之间寻找优雅平衡点的艺术(科学与运气的博弈bushi)。
最后祝观看这篇博客的各位炼丹师在调参路上越走越远——虽然头发可能会越来越少,但模型一定会越来越强!

(图片来源于网络)


















 1202
1202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











