






已知在3D场景中存在相机位置cameraP、其观察点位置viewP、和相机的朝上方向cameraUp,如下图所示
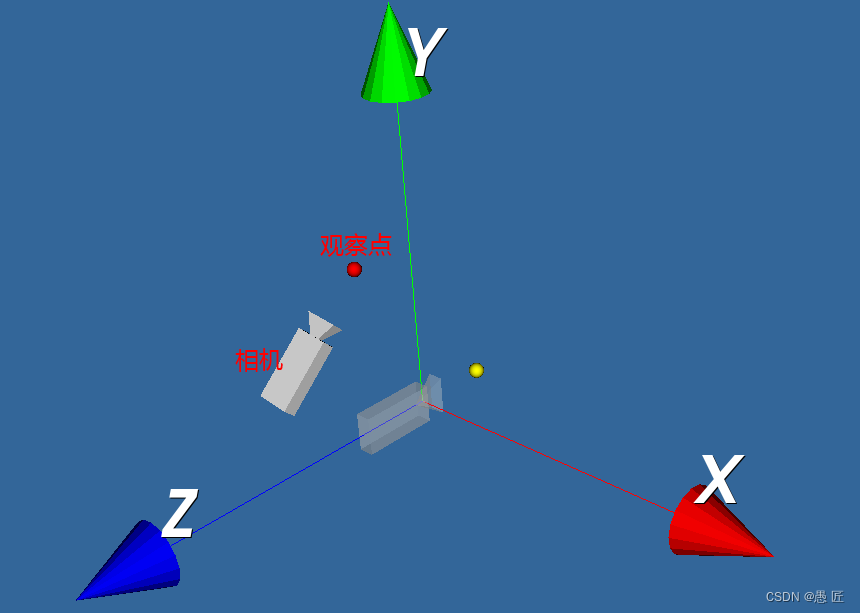
注意:图中的坐标轴既是相机所在旧坐标系的坐标轴,也是其移动后新坐标系的坐标轴!理解这点会有助于理解以下的说明
那么视图矩阵的作用就是将相机移动坐标轴原点,同时旋转相机,使得其朝向-Z方向,其向上方向为+Y轴方向!那么场景中的物体(红色球体)在矩阵的作用下和相机保持相对静止地被移动到新的位置(黄色小球的位置),也就实现坐标系的转换!
那么这个矩阵如何求解呢,通过观察可以发现只需要以下两步即可求得
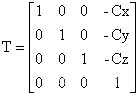
(1)移动,将相机从cameraP移动到(0,0,0)的位置;
(2)旋转,通过某种组合的旋转将相机“摆正”。
第(1)步比较简单,一个移动矩阵即可搞定,其中[Cx Cy Cz]是相机的位置坐标
第(2)步比较复杂,我们通过特殊方式来求得,假设相机转换前的三个轴向量分别是R、U、F,那么有这么一个矩阵M,使得有
M * [Rx Ry Rz] = [1 0 0]
M * [Ux Uy Uz] = [0 1 0]
M * [Fx Fy Fz] = [0 0 -1]
卧槽!这个似乎没法求……
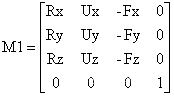
没关系!正着不行,我们逆着来,假设有一个矩阵M1,有
M1 * [1 0 0] = [Rx Ry Rz]
M1 * [0 1 0] = [Ux Uy Uz]
M1 * [0 0 -1] = [Fx Fy Fz]
那么M1就是M的逆矩阵,根据正交矩阵的特性:逆矩阵即转置矩阵,只需将M1转置即可得到M,M1可方便的得到为
那么转置M1即可得到M ,也可带入最初的那几个等式验证,结果正确!
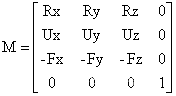
最终的视图变换矩阵即为M*T

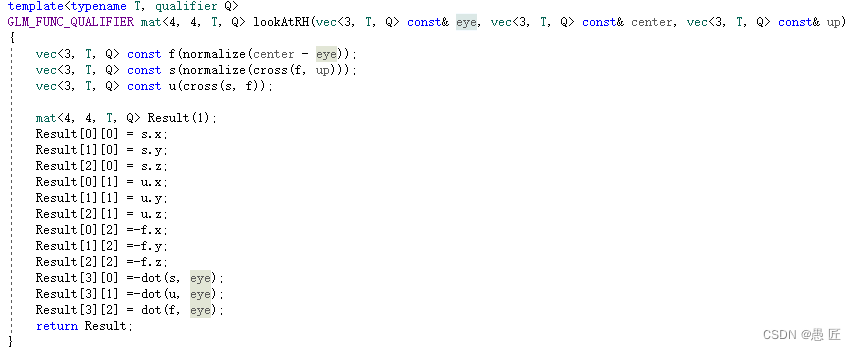
对比glm::lookAt进行验证,结果一致!















 4945
4945











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









