







目录
1.DH表建立
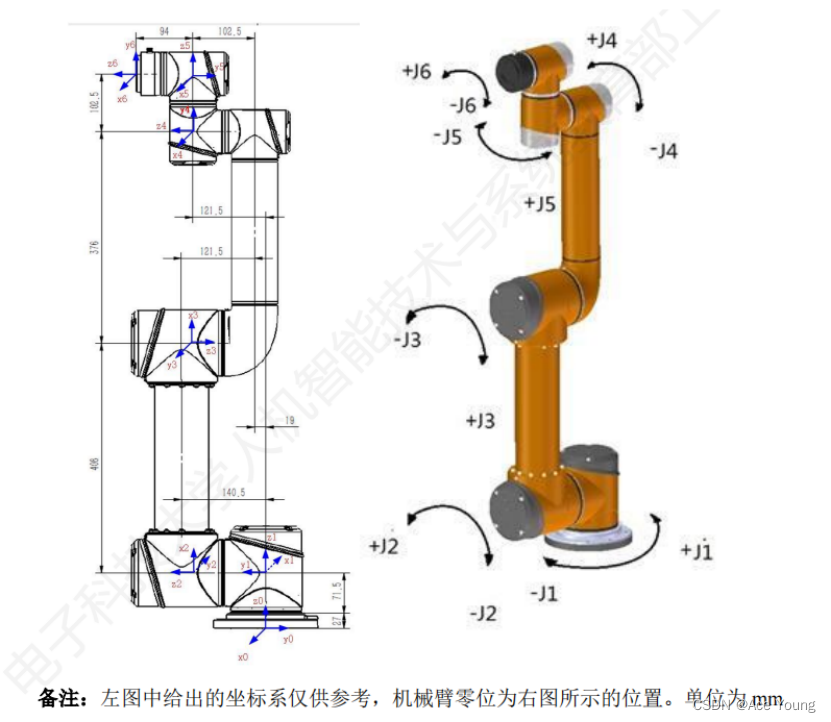
注:使用改进DH表建立的

根据公式求出相邻连杆的变换矩阵
2.Matlab实现正运动学求解
function [H, H_i] = aubo_fkin(DHtable,q)
% H 为输出,末端到基座的 4X4 齐次变换矩阵;
% H_i 为输出,相邻连杆的 4X4 齐次变换矩阵,由于有 n 个连杆,因此 H_i 应该为包含 n 个元素的 cell;
% DHtable 为输入,是一个 nX4 的矩阵,满足 DH 改进约定的 DH 表
% q 为输入,是一个 1xN 的向量,表示关节坐标
%%%!!!!注:机械臂零位的角度应先加到q中,而DH表不含有零位角度!!!!!!!%%
%%相邻连杆的 4X4 齐次变换矩阵%%
first=1;
last=size(DHtable,1);%%计算出有多少个连杆
for i=first:last
theta=q(i);
d=DHtable(i,2);
a=DHtable(i,3);
alpha=DHtable(i,4);
T1(:,:,i)=[ cos(theta) -sin(theta) 0 a;
sin(theta)*cos(alpha) cos(theta)*cos(alpha) -sin(alpha) -d*sin(alpha);
sin(theta)*sin(alpha) cos(theta)*sin(alpha) cos(alpha) d*cos(alpha);
0 0 0 1];
T(:,:,i)=double(T1(:,:,i));
end
%%
%%计算末端到基座的 4X4 齐次变换矩阵和将相邻连杆的 4X4 齐次变换矩阵放置到元胞数组%%
H1=eye(4);
H_i=cell(1,last); %%%预先分配内存
for i=first:last
H1=H1* T(:,:,i);
H_i{i}=T(:,:,i);
end
H_i
H=double(H1)
因公式相同,则使用for循环求出相邻连杆的齐次变换矩阵并相乘得出末端到基座的其次变换矩阵。
















 524
524











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











