







 文章探讨了四轮毂驱动电动汽车稳定性控制的关键技术,包括上层的滑模与模糊神经网络控制器以及下层的动态载荷分配策略。通过simulink与carsim联合仿真验证控制效果,以提升车辆操控性和稳定性。
文章探讨了四轮毂驱动电动汽车稳定性控制的关键技术,包括上层的滑模与模糊神经网络控制器以及下层的动态载荷分配策略。通过simulink与carsim联合仿真验证控制效果,以提升车辆操控性和稳定性。
四轮毂驱动电动汽车稳定性控制,分布式驱动转矩分配。
上层基于滑模,模糊神经网络控制器决策横摆力矩,下层基于动态载荷分配,最优分配,平均分配均可做。
simulink与carsim联合仿真。
ID:361642524761748
敬南山~
四轮毂驱动电动汽车稳定性控制是现代汽车行业面临的一个重要技术挑战。在传统的汽车中,动力传递到车轮的方式主要是通过发动机和传动系统。然而,随着电动汽车的兴起,四轮毂驱动成为了一种新的动力传递方式。四轮毂驱动能够为车辆提供更好的操控性和稳定性,并且具有更高的能效。
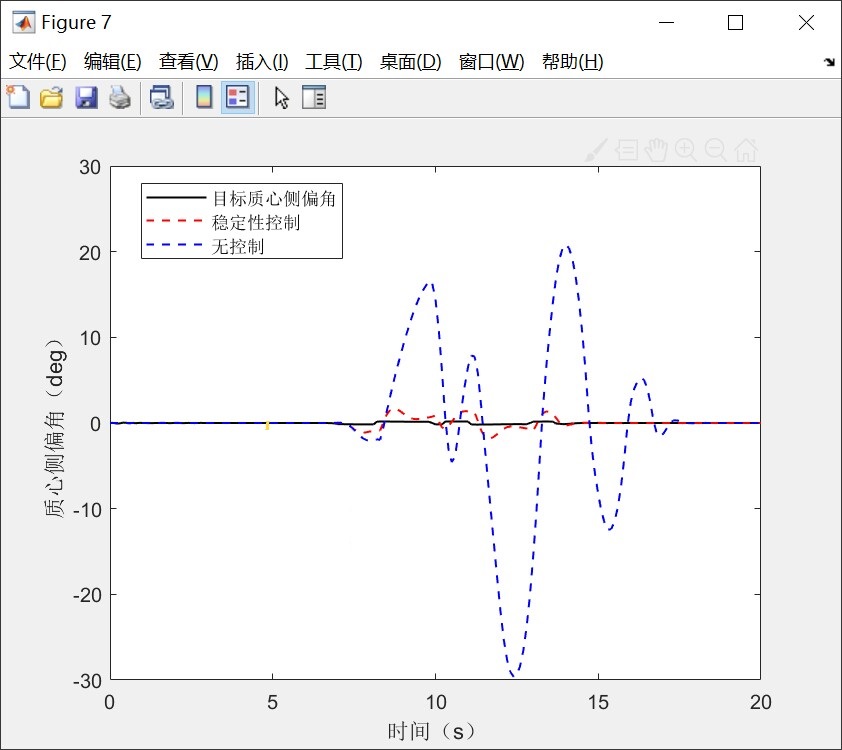
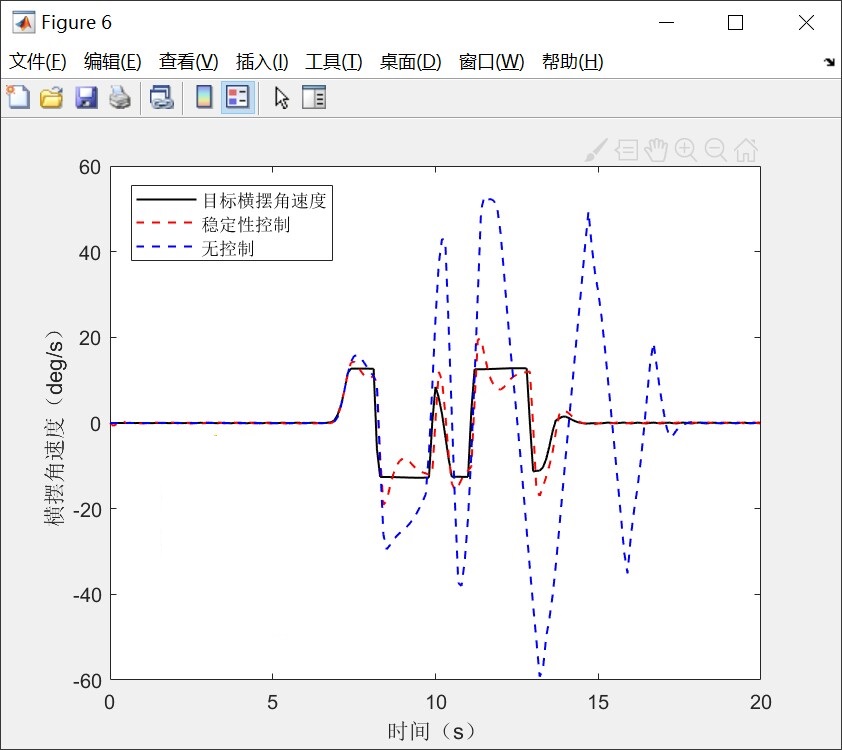
在四轮毂驱动电动汽车中,稳定性控制是一个非常重要的问题。由于电动汽车的动力系统具有较高的响应速度和扭矩输出能力,车辆在转弯和急加速等情况下容易出现侧滑和失控的情况。因此,如何通过控制四个车轮的扭矩分配来提高车辆的稳定性成为了一个关键的技术挑战。
在四轮毂驱动电动汽车稳定性控制中,可以采用上层和下层控制策略相结合的方式来实现。上层控制主要负责决策并调整车辆的横摆力矩,而下层控制主要负责动态载荷分配和最优分配。
在上层控制中,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2297
2297

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









