







三维点云技术的发展始于20世纪60年代,随着激光雷达和三维扫描技术的进步,在建筑、考古、地理信息系统和制造等领域得到了广泛应用。20世纪90年代,随着计算机处理能力的提升,点云数据的采集和处理变得更加高效,推动了自动驾驶、机器人导航和虚拟现实等新兴应用的发展。
展望未来,三维点云技术将在智能城市、无人机监测、精准农业和医疗影像等领域展现巨大潜力。结合人工智能和大数据分析,三维点云将进一步提升环境感知和决策能力,为智能化社会的发展提供关键支撑。随着技术的不断进步,点云数据的精度和处理效率将持续提升,推动更多创新应用的实现。

三维点云数据类型
不同维度的数据
① 一维数据
一维数据通常表示为一个序列或列表,如时间序列、文本、音频信号等。这类数据有以下特性:
-
顺序性:一维数据有明确的顺序,每个数据点都有其位置。
-
线性结构:数据点排列在一条线上,只需要一个坐标轴描述其位置。
② 二维数据
二维数据通常表示为矩阵或图像,如灰度图、彩色图等。这类数据有以下特性:
-
结构化:二维数据有行和列,具有明确的结构。
-
局部相关性:数据点之间存在局部相关性,特别是在图像中,相邻像素之间的值通常相似。
-
平面性:数据点分布在一个平面上,需要两个坐标轴描述其位置。
③ 三维数据
三维数据通常表示为点云、体素、三维图像等。这类数据有以下特性:
-
无序性:点云数据中的点没有固定的顺序,相对于一维和二维数据来说更加自由和无序。
-
空间分布:数据点分布在三维空间中,需要三个坐标轴描述其位置。
-
旋转不变性:点云数据在三维空间中的旋转不影响其性质,即使旋转数据集,其几何特征仍保持不变。
不同维度数据类型之间的关联
一维、二维和三维数据之间存在一些关联性和转换关系:
一维到二维的转换:
一维数据可以通过排列或映射形成二维数据。例如,一维信号可以通过时频分析转换成时频图。
二维到三维的转换:
二维图像可以通过深度信息或多视角图像重建生成三维点云或模型。例如,立体视觉可以将左右图像对生成的视差图转换为三维点云。
三维到二维的转换:
三维点云或模型可以通过投影或截面生成二维图像或切片。例如,三维模型的渲染可以生成其在不同视角下的二维图像。
点云的无序性与旋转不变性
无序性与旋转不变性是点云最重要的两个特性。
① 无序性
-
定义:点云数据中的点没有特定的顺序,每个点独立存在。
-
影响:无序性使得传统的序列处理方法(如RNN)不适用于点云处理,需要特殊的方法来处理点云数据,如PointNet等神经网络架构。
② 旋转不变性
-
定义:点云数据在三维空间中的旋转不会改变其固有性质,即几何特征保持不变。
-
影响:处理点云数据时,需要方法能够对旋转保持不变性,确保即使点云旋转,其分类或识别结果不变。常用的方法包括使用对称函数(如最大值、最小值)或数据增强(旋转数据)进行训练。
三维点云数据的基本知识
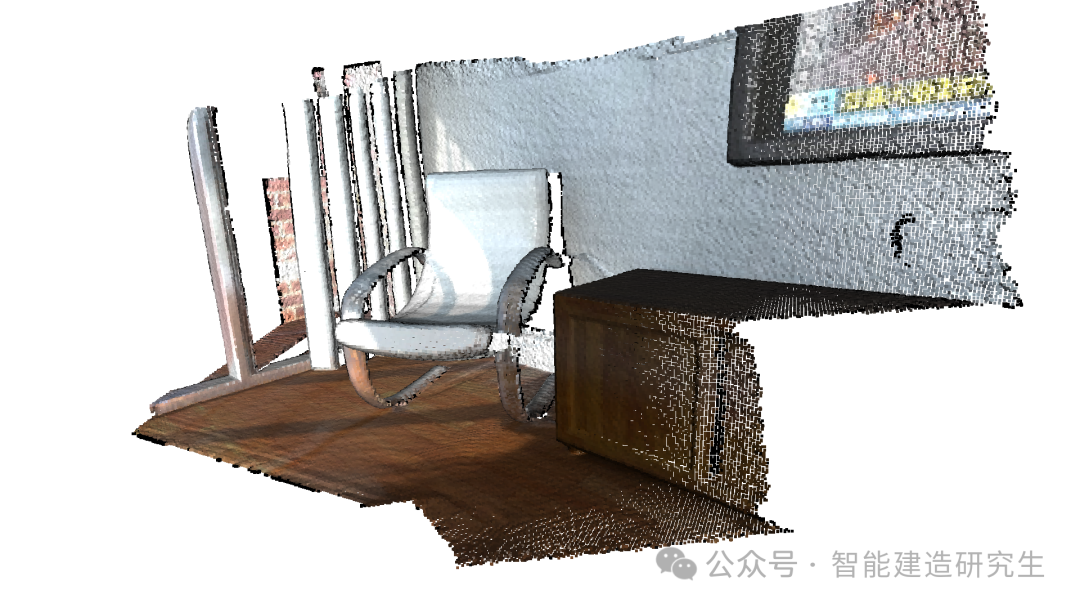
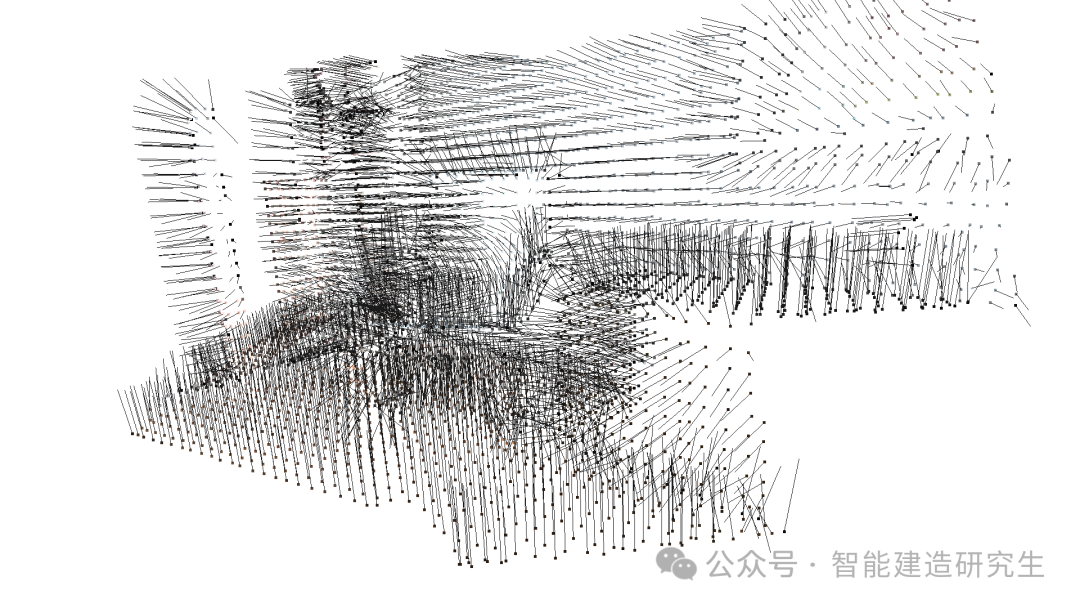
常见的三维点云坐标数据除三维坐标信息外,还包括反射强度、法向量、RGB色彩和alpha色彩强度等属性值。下图展示的是点云的法向量特征的可视化:
点云的数据存储结构分为有序点云和无序点云。
| 特性 | 有序点云 | 无序点云 |
|---|---|---|
| 数据顺序 | 有顺序 | 无顺序 |
| 邻域关系 | 明确 | 不明确,需要构建邻域结构 |
| 存储结构 | 二维矩阵、行列索引 | 简单列表、KD树、八叉树、哈希网格 |
| 空间查询效率 | 较高 | 较高(使用合适的数据结构) |
| 应用场景 | 表面重建、图像处理扩展 | 大规模点云处理、灵活空间查询 |
| 处理效率 | 速度较快 | 速度相对较慢 |
点云采集设备
点云数据的采集方法主要包括激光雷达和RGBD相机。
① 激光雷达(LiDAR)
工作原理:激光雷达通过发射激光束并测量其反射时间来确定目标物体的距离。这种技术被称为“飞行时间(Time of Flight, ToF)”测量。激光雷达可以产生高精度的三维点云数据,反映物体的形状和位置。
主要特点:
高精度:激光雷达能够提供厘米级甚至毫米级的测量精度,非常适合需要高精度数据的应用,如自动驾驶和测绘。
远距离:激光雷达可以测量数百米范围内的物体,非常适合大范围的环境扫描。
全天候工作:激光雷达不受光线变化影响,可以在白天和夜晚以及各种天气条件下工作。
典型应用:
自动驾驶:激光雷达用于环境感知,生成高精度的三维地图,帮助自动驾驶系统进行导航和避障。
测绘和建模:激光雷达用于地形测绘、城市建模和古迹保护等领域,生成精确的三维模型。
无人机:激光雷达安装在无人机上,用于进行高精度的空中测绘和环境监测。
② RGBD相机
工作原理:RGBD相机是一种结合了传统RGB相机和深度传感器的设备。它不仅捕获彩色图像(RGB),还通过深度传感器获取每个像素点的深度信息,从而生成三维点云数据。深度传感器通常使用结构光或飞行时间(ToF)技术来测量深度。
主要特点:
彩色信息:RGBD相机不仅提供深度信息,还同时捕获彩色图像,使得点云数据包含颜色信息,有助于对象识别和分类。
适中精度:RGBD相机的深度测量精度通常在厘米级,适合中等精度需求的应用。
短距离:RGBD相机的有效测量范围通常在几米到十几米之间,适合近距离的环境感知。
典型应用:
-
机器人导航:RGBD相机用于室内机器人导航,帮助机器人避障和路径规划。
-
手势识别和人体追踪:RGBD相机用于人体动作捕捉和手势识别,广泛应用于游戏、虚拟现实和人机交互领域。
-
增强现实:RGBD相机用于增强现实应用,通过捕捉现实世界的三维信息,实现虚拟对象与现实环境的融合。
两种采集方式的对比与选择:
| 特性 | 激光雷达(LiDAR) | RGBD相机 |
|---|---|---|
| 测量精度 | 高(厘米级或毫米级) | 中(厘米级) |
| 测量距离 | 远(数百米) | 近(几米到十几米) |
| 数据类型 | 三维点云 | 彩色点云(RGB + 深度) |
| 工作环境 | 全天候 | 需要一定的光照条件 |
| 典型应用 | 自动驾驶、测绘、无人机 | 机器人导航、手势识别、AR |
| 成本 | 高 | 相对较低 |
点云的存储格式
点云常见存储格式包括:pcd、ply、txt、bin、obj等。每种格式有其特定的用途和优势。
① PCD (Point Cloud Data)
PCD 是由 Point Cloud Library (PCL) 开发的一种点云数据格式。PCD 文件可以存储点的三维坐标以及其他属性如颜色、法向量等。
特点:
-
结构化:PCD 文件可以是 ASCII 或二进制格式,ASCII 格式易于阅读和编辑,二进制格式存储效率更高。
-
扩展性强:可以存储多种属性,不仅限于坐标,还包括颜色、法向量、强度等。
② PLY (Polygon File Format)
PLY 是一种用于存储三维数据的格式,最初由斯坦福大学开发。它可以存储点云以及多边形网格。
特点:
-
灵活性:支持 ASCII 和二进制两种格式,二进制格式更加紧凑,适合大数据量存储。
-
丰富的属性:可以存储每个顶点的多种属性,如颜色、法向量、纹理坐标等。
典型应用:
-
常用于计算机图形学和 3D 打印领域,用于存储和交换三维模型数据。
③ TXT (Text File)
TXT 是一种纯文本格式,可以用来存储点云数据的三维坐标和其他属性。
特点:
-
简单易用:易于生成和读取,可以使用任何文本编辑器查看和修改。
-
可读性:由于是纯文本格式,易于理解和调试。
典型应用:
-
适用于小规模点云数据的快速存储和简单测试,但不适合大规模数据存储和处理。
④BIN (Binary File)
BIN 是一种自定义的二进制格式,用于高效存储点云数据。
特点:
-
存储效率高:二进制格式占用空间小,读取和写入速度快。
-
灵活性:可以根据需要自定义数据结构和属性。
典型应用:
-
常用于需要高效存储和快速读取的大规模点云数据应用,如自动驾驶领域的激光雷达点云存储。
⑤ OBJ (Object File)
OBJ 是一种用于表示三维几何图形的标准文件格式,最初由 Wavefront Technologies 开发。OBJ 文件主要用于存储三维模型的顶点坐标、纹理坐标和法向量等信息。
特点:
-
丰富的几何描述:不仅能存储点云,还能存储多边形面,适用于复杂的三维模型。
-
广泛支持:被大多数三维建模和渲染软件支持,如 Blender、Maya、3ds Max 等。
典型应用:
-
广泛用于三维建模、渲染和动画制作,以及3D 打印模型的存储和传输。
以下是对这些格式的总结:
| 格式 | 优点 | 缺点 | 典型应用 |
|---|---|---|---|
| PCD | 结构化、扩展性强、支持多种属性 | 文件较大(ASCII) | PCL 库点云处理 |
| PLY | 灵活性高、支持多种属性 | 文件较大(ASCII) | 计算机图形学、3D 打印 |
| TXT | 简单易用、可读性高 | 不适合大规模数据 | 小规模点云存储、测试 |
| BIN | 存储效率高、读取速度快 | 自定义复杂 | 大规模点云数据、高效存储 |
| OBJ | 支持复杂几何描述、广泛支持 | 文件较大 | 三维建模、渲染、动画制作 |
以上内容总结自网络,如有帮助欢迎关注与转发,我们下次再见!















 189
189











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









